 CAN通信针脚定义 can通信和串口通信区别在哪
CAN通信针脚定义 can通信和串口通信区别在哪
can线怎么工作
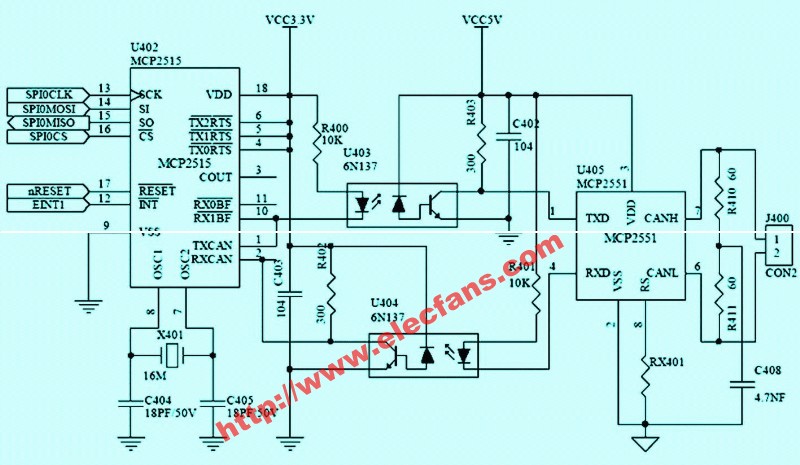
CAN线是用于CAN(Controller Area Network)通信的物理传输介质,它是一对差分信号线,通常使用双绞线来传输数据。CAN线的工作原理如下:
1. 差分信号传输:CAN线上的两根线分别是CAN_H和CAN_L,它们携带着差分信号。CAN_H线上的电压值高于CAN_L线时,表示传输的是高电平信号;CAN_H线上的电压值低于CAN_L线时,表示传输的是低电平信号。通过这种差分传输方式,CAN线具备了较强的抗干扰能力,可以有效地减少信号传输过程中的电磁干扰和噪声干扰。
2. 帧结构:CAN通信采用基于帧的数据传输方式。数据以数据帧的形式进行传输,一个CAN数据帧包含了以下几个重要字段:
- 标识符(Identifier):用于在总线上对不同的数据帧进行识别和区分。
- 控制位(Control Bits):用于指示数据帧的类型,例如数据帧、远程帧等。
- 数据字段(Data Field):用于存放实际的数据信息。
- 校验字段(Cyclic Redundancy Check,CRC):用于检验数据传输的正确性。
- 帧结束位(End of Frame,EOF):表示一个数据帧的结束。
3. 总线访问控制:CAN线采用CSMA/CR(Carrier Sense Multiple Access with Collision Resolution)的访问控制方式。当一个节点要发送数据时,它会先监听总线上是否有其他节点正在发送数据。如果没有正在发送数据的节点,该节点可以直接发送数据。如果有节点正在发送数据,那么该节点会等待一段时间,然后再尝试发送数据,以避免数据冲突。
4. 错误检测和恢复:CAN线的通信协议内置了丰富的错误检测和恢复机制。每个节点在发送数据时,都会对发送的数据进行CRC校验,接收节点在接收数据时也会进行CRC校验。如果校验发现错误,接收节点可以通过发送错误帧来通知发送节点重发数据。
CAN线通过差分信号传输、帧结构、总线访问控制和错误检测机制来实现高效可靠的数据传输,并具备较强的抗干扰能力和错误纠正能力,因此在汽车网络和工业控制等领域得到广泛应用。
CAN通信针脚定义
CAN通信是一种常用于车辆和工业控制系统中的数据通信协议。CAN总线接口定义了一组针脚,用于连接CAN控制器和其他CAN设备。在标准的CAN总线接口中,通常有以下几个主要的针脚定义:
1. CAN-High (CAN_H):用于传输CAN高电平信号的引脚。它是CAN总线中传输数据的正极极性线。
2. CAN-Low (CAN_L):用于传输CAN低电平信号的引脚。它是CAN总线中传输数据的负极极性线。
3. CAN Ground (CAN_GND):用于连接CAN系统的地线。它提供了系统的参考地。
4. CAN V+ (CAN_V+):用于连接CAN系统的正电源引脚。它提供了供电电压。
5. CAN V- (CAN_V-):用于连接CAN系统的负电源引脚,通常是接地。它提供了供电电压的返回路径。
这些针脚定义可以略有不同,具体取决于使用的CAN总线硬件和标准。在实际应用中,还可能包含其他引脚,如终端电阻(Termination Resistor)、错误信号线等。因此,在使用CAN总线时,应根据具体的硬件和标准规范来确定针脚定义和使用方式。
can通信和串口通信区别在哪
CAN通信和串口通信是两种不同的数据通信方式,它们在以下几个方面有所区别:
1. 物理层接口:CAN通信使用差分信号线,通常采用双绞线传输数据,具有抗干扰能力较强。而串口通信使用单根信号线,通常是异步串口通信,使用单根信号线传输数据和控制信息。
2. 传输速率:CAN通信的传输速率较高,可以达到几百 Kbps 或更高,适用于高速数据通信,例如汽车网络和工业控制系统。而串口通信的传输速率一般较低,通常在几百 bps 到几百 Kbps 范围内。
3. 数据帧结构:CAN通信使用基于帧的数据传输方式,数据以数据帧的形式传输,包括标识符、数据和校验字段。而串口通信通常以字节为单位进行传输,没有特定的帧结构。
4. 多点通信:CAN通信支持多点通信,可以连接多个CAN节点组成网络。每个节点在总线上通过标识符来区分和识别数据帧。而串口通信通常是点对点的通信方式,只能连接两个设备。
5. 报错检测:CAN通信具有较强的错误检测和纠正能力,能够自动检测和纠正传输过程中的错误,并提供错误状态的反馈。串口通信一般没有类似的自动错误检测和纠正机制。
总体而言,CAN通信适用于高速、多节点、抗干扰要求较高的应用场景,例如汽车网络和工业控制系统。而串口通信适用于简单的点对点数据传输,通常用于连接计算机与外部设备、传感器、模块等。选择适合的通信方式应根据具体的需求和应用场景来决定。
编辑:黄飞
-
CAN
+关注
关注
57文章
2808浏览量
465625 -
电磁干扰
+关注
关注
36文章
2356浏览量
105975 -
串口
+关注
关注
14文章
1575浏览量
78005 -
串口通信
+关注
关注
34文章
1632浏览量
56168 -
差分信号
+关注
关注
3文章
380浏览量
27916
发布评论请先 登录
相关推荐
什么是CAN通信矩阵 如何理解CAN通信矩阵
CAN通信和串口通信
蓝牙通信、串口通信、和can通信以及MCU之间的关系

【分享】什么是串口通信?串口常见通信问题如何解决?

can通信与uart通信的区别 CAN相比UART难吗
can通信与uart通信的难度区别





 工商网监
工商网监
评论