 什么是busoff?BUSOFF是如何产生的?BUSOFF恢复机制和故障码记录
什么是busoff?BUSOFF是如何产生的?BUSOFF恢复机制和故障码记录
1、什么是busoff?
BUSOFF,从字面意思可以看出,表示总线的关闭,此时ECU从总线脱离,既不能接收总线的报文,也不能向总线发送报文。
2、BUSOFF是如何产生的?
CAN总线上存在多种错误状态,包括:位错误(Bit Check Error)、位填充错误(Bit Stuff Error)、CRC错误(CRC Error)、帧格式错误( Check Error)、应答错误(Acknowledgment Error)。
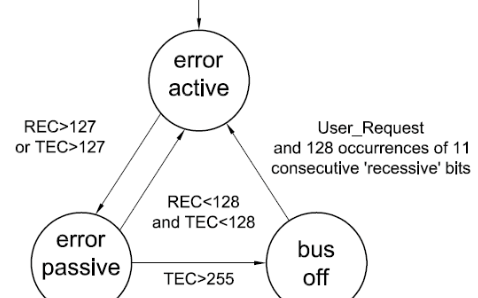
CAN模块配有接收错误计数器(REC)及发送错误计数器(TEC);CAN错误存在三种状态,即主动错误、被动错误、总线关闭;
1.当发送错误计数器和接收错误计数器值都小于128,为“主动错误”
2.当发送错误计数器或接收错误计数器值大于等于128,变为“被动错误”
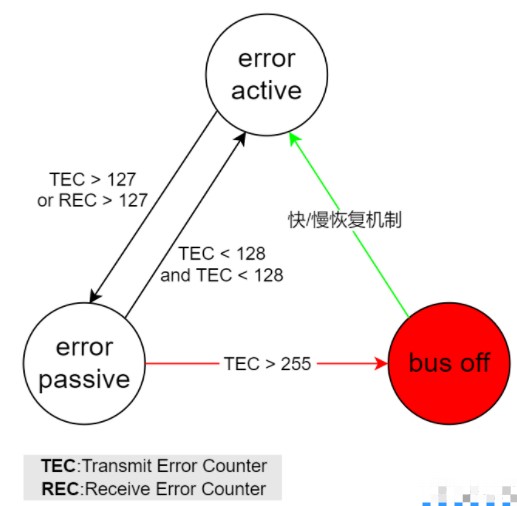
3.当发送错误计数器大于等于256时,“总线关闭”。
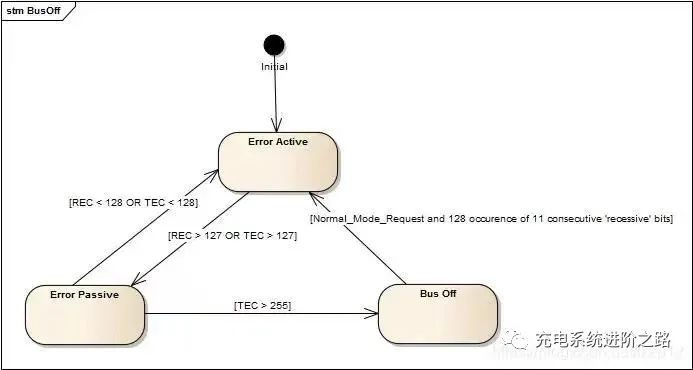
因此:节点进入busoff状态,一定是因为节点自身识别到自己发送错误,TEC大于255导致的。
3、BUSOFF恢复机制和故障码记录
1)恢复机制
11898-1规范中,规定:当节点busoff以后,至少要等待连续128个11 bit隐性位;
当有节点发生busoff时,为了不干扰同网段内的其他节点通信,故障节点不应过快地参与通信。先让故障节点进行一个快恢复,这样,因为偶发干扰导致的节点故障可以快速恢复,重新参与通信。如果故障节点经过了几次快恢复,仍然没有恢复正常通信,为了尽可能地降低对同网段其他节点的通信干扰,可以让故障节点进入慢恢复,即:让故障节点不要过快地加入总线,降低其对总线的干扰。
快恢复(L1)
恢复时间, <=100ms
恢复次数,5~10次不等
慢恢复(L2)
恢复间隔, [200ms, 1s]
恢复次数, 不限
2)DTC使能条件
成熟条件:恢复N次不能成功之后,记录DTC
Bus Off产生后,不再记录通信丢失类DTC
3、哪些因素会导致BUSOFF?
引起错误的原因主要包括:
1)CAN_H开路、
2)CAN_L开路
3)CAN_H对CAN_L短路/开路、
4) CAN_L对VBAT短路
5) CAN_H对GND短路
6) CAN_L对GND短路
7)终端电阻开路
9)CAN总线信号干扰导致
5、BUSOFF发生后如何处理?
BUSOFF故障发生后,一般可以重启CAN控制器或是重新上电;
当发生CAN总线关闭时,我们可以检查Bus Off寄存器的值,对CAN控制器的驱动及相关寄存器进行初始化操作。
审核编辑:刘清
-
收发器
+关注
关注
10文章
3431浏览量
106037 -
CAN总线
+关注
关注
145文章
1952浏览量
130808 -
计数器
+关注
关注
32文章
2256浏览量
94635 -
CRC效验
+关注
关注
0文章
30浏览量
1124 -
终端电阻
+关注
关注
1文章
95浏览量
11818
原文标题:CAN总线busoff原理介绍
文章出处:【微信号:谈思实验室,微信公众号:谈思实验室】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
CAN控制器总线错误分析之CAN节点BusOff恢复过程分析与测试
将TC397的MCMCAN模块的canh和canl短接到GND,MCMCAN模块进入到bus off状态后无法继续正常发送的原因?
请问TC275造busoff故障后的状态标志位是哪个?
TC275由于错误帧太多了,导致进入busoff状态怎么解决?
STM32G0B1 CAN的自动重发间隔是多长时间?
spc560p怎么使用中止机制
ti280025 CAN通信
S32K118在高负载时Busoff中断丢失的原因?
一种嵌入式Linux系统多重备份与恢复机制
基于基本回路的MPLS网络重路由故障恢复机制
基于硬件的密钥安全备份和恢复机制
经验分享:节点BusOff恢复过程分析与测试

CanSM模块如何处理Busoff等问题呢





 工商网监
工商网监
评论