自主移动机器人 (AMR) 为不同领域和行业带来了诸多优势,包括提高了安全性和效率。然而,为了能够安全、独立地工作,这些复杂的系统需要精心集成多项技术。在开发 AMR 时,设计阶段在很大程度上决定了 AMR 成功与否,因此至关重要。本博客详细讨论了 AMR 的两个重要组件——电源和运动控制的设计注意事项,以及安森美(onsemi)提供的相应解决方案。
自主移动机器人中使用的电源系统和电源组件会对其总电池寿命和工作时长产生重大影响。为 AMR 设计电源系统时要考虑的重要性能特征和参数包括:
AMR 通常使用锂离子电池,因为此类电池的能量密度高,使用时间长。同时,电源管理单元可调节从电池到其他组件的功率流。电压和电流水平通过开关转换器和稳压器进行控制。AMR 中的电池管理系统可监控电池的状态、电量、温度和电流,以确保 AMR 安全高效地运行,而车载电池充电器的规格取决于电池类型、容量和电压。智能电源模块为电机控制系统提供高功率开关。IPM 中的功率开关配有栅极驱动器,用于提供相应的信号来打开和关闭开关。功率因数校正 (PFC) 控制器可提升电源系统的总效率。安森美的 PFC 控制器非常适合 AC-DC 电源应用,比如图腾柱无桥 PFC 前端或基于 LLC 谐振拓扑的 DC-DC 级。它们还适用于高电压 DC-DC 功率级,可在 AMR 中实现高效率和高密度快速电池充电器设计。
在 AMR 中,电机驱动型执行器用于移动机器手臂和轮子,因此其选择至关重要。AMR 需要采用效率高且紧凑轻便的高扭矩和高速执行器。选择执行器时,需要对无刷直流 (BLDC) 电机、电机控制器、MOSFET、通用控制器板 (UCB) 和栅极驱动器等组件进行评估。
与有刷电机相比,BLDC 电机具有多个优势。其效率高、噪声低且高度可靠,可以减少维护工作,因此被应用于 AMR 中。然而,控制此类电机需要复杂的算法和适当的驱动器。三相 BLDC 电机广泛用于机器人和工业驱动器。
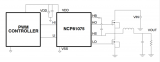
图 3:AMR BLDC 电机控制解决方案
电机控制器的功能是精确控制 AMR 执行器中的电机。这些器件可完全集成(通过嵌入式控制算法),或者可使用运行电机控制算法的专用微控制器单元 (MCU)。(AMR 中常见的)三相电机由功率晶体管使用脉宽调制 (PWM) 开-关信号驱动,这些开关可由硅或宽禁带材料制成,比如碳化硅 (SiC) 或氮化镓 (GaN)。安森美提供多个 BLDC 电机控制解决方案,包括 ECS640A ecoSpin 电机控制器 UCB、NCP81075 栅极驱动器,以及可用于加速 AMR 执行器开发的电源板。
UCB 是基于 Xilinx Zynq-7000 SoC 的系统级模块 (SoM),非常适合精密应用,也可用于先进的人工智能 (AI) 。此外,安森美提供基于屏蔽栅极沟槽技术的 MOSFET(30V 至 150V),并提供 u8FL、SO8-FL、双面冷却和顶部冷却等封装选项。基于 T10 技术的全新 30-40V 和 80V MOSFET 支持低压与中压应用。T10 器件分为两大类别,分别用于电源转换和电机控制。用于电机控制的 T10M 器件提供出色的导通电阻,UIS 能力提高 10%,并具有优异的体二极管软恢复性能,可降低电压尖峰并解决 EMI 问题。对于高功率应用中的三相 BLDC 电机,安森美推荐使用基于 PTNG 技术的 MOSFET(80V、100V、120V和150V),而 NTMTSC1D6N10MC、NTMTSC4D3N15MC、NTBLS1D5N10MC 和 NTBLS4D3N15MC MOSFET 可满足高性能应用的要求。要打造灵活而智能的自主移动机器人,电源和运动控制技术发挥的作用很关键。随着时间推移,单个系统和组件的选择可对这些先进方案的性能与可靠性产生显著影响。安森美可以全力支持设计人员完成选择过程,确保 AMR 能够充分发挥其潜能。欲了解有关 AMR 的更多信息,请点击“阅读原文”下载我们的白皮书:“自主移动机器人的解决方案和注意事项”。
原文标题:电源与电机控制方案如何更好应用于自主移动机器人?
文章出处:【微信公众号:安森美】欢迎添加关注!文章转载请注明出处。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
原文标题:电源与电机控制方案如何更好应用于自主移动机器人?
文章出处:【微信号:onsemi-china,微信公众号:安森美】欢迎添加关注!文章转载请注明出处。
相关推荐
移动机器人已经成为现代社会不可或缺的一部分,在各个领域发挥着越来越重要的作用。在这个过程中,富唯智能机器人以其卓越的技术突破,引领着移动机器人领域的发展潮流。
![的头像]() 发表于
发表于 12-13 17:57
•135次阅读

自主移动机器人 (AMR) 和自动导引车 (AGV) 是具有移动、感知和连接能力的无人机器人,用于运输和
![的头像]() 发表于
发表于 11-14 10:30
•338次阅读

Amazon Robotics 在开发其首款自主移动机器人 (AMR) Proteus时,充分利用与 TI 近十年的合作关系获得了技术专业知识。我们公司的嵌入式处理器、电源和连接解决方案
![的头像]() 发表于
发表于 10-30 11:05
•322次阅读
富唯智能移动机器人分为复合机器人和转运机器人,搭载ICD核心控制器,实现一体化控制,最快可实现15分钟现场
![的头像]() 发表于
发表于 08-27 17:22
•330次阅读

自主移动机器人 (AMR) 和自动导引车 (AGV) 是具有移动、感知和连接能力的无人机器人,用于运输和
![的头像]() 发表于
发表于 07-16 09:37
•651次阅读
海康机器人第100000台移动机器人已经成功下线 。这是一个重要的里程碑,标志着海康机器人在全品类移动机器人(AMR)领域取得了显著的进展。
![的头像]() 发表于
发表于 05-24 14:43
•1056次阅读
移动机器人的卓越性能、平稳运动和可靠运行离不开高效精确的电机控制。机器人的自主性和复杂性不断提高,非常需要能够处理复杂
![的头像]() 发表于
发表于 05-24 09:15
•1207次阅读
安森美使用DIN导轨制造了自主移动机器人,以便能够添加新产品和功能,持续进行更多的传感器融合,也可以通过使用新的安森美电子保险丝产品e-Fuse NIS3071来扩展电源子系统。
发表于 04-24 11:52
•595次阅读

机械臂对精度和运动稳定性的要求较高,因此计算量大、周期短,比移动机器人一般要高1到2个量级。移动机器人一般对同步精度要求不高,其配置相对较低。
发表于 03-11 09:53
•1041次阅读

复合机器人是一种集成了移动机器人、协作机器人和机器视觉等多项功能的新型机器人。它的开发目的是为了解决工厂物流中最后一米的问题,提供智能搬运解
![的头像]() 发表于
发表于 02-28 15:05
•2061次阅读

自主移动机器人(AMR)为不同领域和行业带来了诸多优势,包括提高了安全性和效率。然而,为了使AMR能够安全、独立地工作,这些复杂的系统需要精心集成多项技术,像是电源和运动控制这两个重要
![的头像]() 发表于
发表于 01-24 09:18
•919次阅读
日常生活中的很多方面发挥作用。安森美(onsemi)开发了一款自主移动机器人演示,该演示由多个子系统方案构成,是一个使用安森美创新产品打造的完整的机器人设计。这个概念
![的头像]() 发表于
发表于 01-09 08:30
•681次阅读

随着科技的日新月异,人类与机器人的互动将愈发频繁。从早晨在本地咖啡店里,协作机器人 (cobot) 为顾客精心冲泡咖啡,到在仓库中,自主移动机器人 (AMR) 自由穿梭各处拣选包裹。协
![的头像]() 发表于
发表于 01-04 09:34
•823次阅读

移动机器人到底是由哪些部分组成的呢,接下来我们就一起认识一下它。
![的头像]() 发表于
发表于 01-02 09:49
•1676次阅读

协作(复合)移动机器人(AGV/AMR)相较传统工业机器人具有更加安全和简单的工作优势,具备较强的发展潜力。协作(复合)移动机器人安全性和操作的简洁性、灵活性不断提高,优势得到了充分发挥,在越来越多
![的头像]() 发表于
发表于 12-25 16:14
•513次阅读

 电源与电机控制方案如何更好应用于自主移动机器人?
电源与电机控制方案如何更好应用于自主移动机器人?





 工商网监
工商网监
评论