 点云标注在自动驾驶中的优化策略与实践
点云标注在自动驾驶中的优化策略与实践

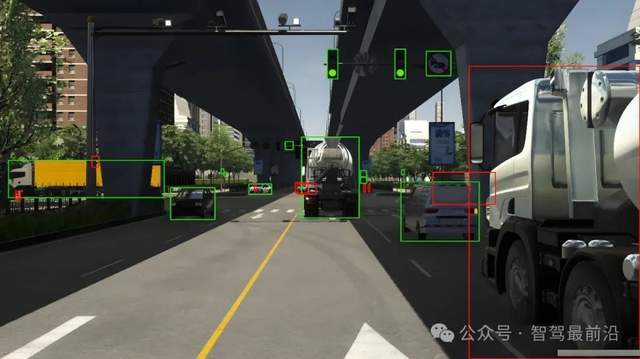
在自动驾驶技术的实现中,点云标注是一种非常重要的技术,它可以为自动驾驶系统提供准确的环境感知信息。本文将介绍点云标注在自动驾驶中的优化策略和实践。
一、点云数据的预处理
在点云标注之前,需要对点云数据进行预处理,包括滤波、降噪、平滑等操作,从而去除点云数据中的冗余和噪声,提高点云数据的准确性和可靠性。常用的预处理算法包括统计学方法、形态学方法、小波变换等。
二、特征提取和识别
在预处理之后,需要对点云数据进行特征提取和识别,从而获取车辆周围环境的详细信息。常用的特征包括几何特征、纹理特征、边缘特征等。识别算法包括机器学习、深度学习等。
三、传感器融合与数据融合
为了提高点云标注的准确性和可靠性,可以将多个传感器获取的数据进行融合,从而获取更加全面和准确的环境信息。数据融合算法包括加权平均法、卡尔曼滤波、扩展卡尔曼滤波等。
四、模型优化和迁移学习
为了提高点云标注的效率和准确性,可以通过优化神经网络模型和采用迁移学习策略来减少训练时间和提高识别精度。常用的优化方法包括剪枝法、权值共享法、知识蒸馏等。
五、实践案例与效果评估
以某自动驾驶实验车为例,介绍点云标注技术在自动驾驶中的应用和效果评估。实验结果表明,优化后的点云标注算法可以提高障碍物识别的准确率和实时性,为自动驾驶系统的安全性和可靠性提供了有力保障。
数据堂深刻了解客户痛点,提出智能驾驶数据解决方案,提供成品数据集、定制采集标注服务、可似私有化部署的标注平台。通过高质量的训练数据协助客户改善智能驾驶AI模型,以创造更加安全舒适的驾乘体验。
总之,点云标注在自动驾驶中扮演着非常重要的角色。通过不断优化点云标注的算法和模型,可以提高其准确性和可靠性,为自动驾驶系统的实现和发展提供更加有力的支持。
审核编辑 黄宇
-
传感器
+关注
关注
2577文章
55446浏览量
793759 -
自动驾驶
+关注
关注
794文章
14977浏览量
181370
发布评论请先 登录
自动驾驶占用网络还需要数据标注吗?

大模型时代自动驾驶标注有什么特殊要求?

自动驾驶数据标注是所有信息都要标注吗?


VLA能解决自动驾驶中的哪些问题?

生成式 AI 重塑自动驾驶仿真:4D 场景生成技术的突破与实践

自动驾驶数据标注主要是标注什么?
低速自动驾驶与乘用车自动驾驶在技术要求上有何不同?


卡车、矿车的自动驾驶和乘用车的自动驾驶在技术要求上有何不同?

端到端数据标注方案在自动驾驶领域的应用优势
浅析4D-bev标注技术在自动驾驶领域的重要性
自动驾驶中常提的“点云”是个啥?

激光雷达在自动驾驶领域中的优势




评论