 英创汇智线控转向解决方案让汽车更加智能、更加安全
英创汇智线控转向解决方案让汽车更加智能、更加安全
引言:
汽车行业在“新四化”目标的牵引下快速发展,汽车电动化与智能化取得了显著的成果。汽车智能化的发展对汽车底盘提出了新的需求,传统汽车底盘在响应速度、执行精度、安全性等方面不再能满足智能汽车的要求,汽车底盘由传统底盘向线控底盘过渡。其中,线控转向(Steering-by-Wire,SBW)是线控底盘中控制横向运动的核心部件,是实现高阶自动驾驶的重要执行机构。国务院印发的《新能源汽车产业发展规划(2021-2035)》中将纯电动汽车底盘一体化、线控执行系统等列为重点技术攻关工程。国标《GB17675-2021 汽车转向系基本要求》中删除了不得装用全动力转向机构的要求(1999年的3.3),法规层面已允许转向系统方向盘与转向器之间的物理解耦。国家战略的推动以及法规标准的落地对于线控转向(SBW)产品的大批量产业化应用具有直接的促进作用。本文将从转向技术的发展路径、技术方案、关键技术等方面对英创汇智的线控转向(SBW)解决方案进行详细介绍。
1►
转向技术发展路径
转向系统是汽车底盘的关键部件之一,对于汽车的操稳性、安全性、舒适性起到至关重要的作用。随着汽车工业电动化的深入,转向系统经历了从机械转向系统(MS)、机械液压转向助力系统(HPS)到电子液压助力转向系统(EHPS)、电动助力转向系统(EPS)再到线控转向(SBW)的发展历程。

图1-1 汽车转向系统发展路径
图片来源:天风证券研究报告《智能电动汽车赛道深度二:线控转向,高阶智能驾驶核心部件》
相比机械和液压转向系统,电动助力转向系统(EPS)的结构更加简单、助力控制响应更快,同时能耗也更低,而且不需要保养和维护,是目前汽车转向系统的主流产品。线控转向(SBW)相比EPS最大区别在于方向盘和执行机构之间无机械连接,因此在成本控制、设计灵活性、功能丰富性、空间布置等方面具有明显优势。
转向系统作为底盘核心零部件,具有很高的技术壁垒。我国汽车工业起步相对较晚,因此当前德国、美国、日本、韩国的供应商巨头仍然占据着转向系统的大部分市场,尤其是高端EPS和线控转向(SBW)系统,国内仍然处于追赶的状态。但是随着国内汽车产业链的日渐成熟,一些企业也开始逐步掌握转向系统的核心技术,未来有望快速提升所占的市场份额。
2►
英创汇智线控转向技术方案(T-SBW)
2.1 线控转向的系统方案
如图2-1所示为英创汇智的线控转向(SBW)系统方案示意图,主要由方向盘执行器(HWA)和前轮执行器(RWA)组成。线控转向(SBW)相比EPS系统最大的却别就是没有中间轴,即方向盘执行器与前轮执行器在机械上是完全解耦的,因此具备更加灵活可调的转向比和更加舒适的路面反馈,同时也为自动驾驶场景下的方向盘静默、方向盘折叠提供了可能性。
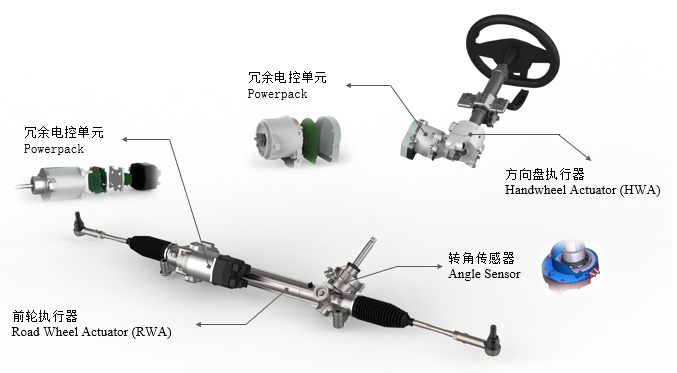
图2-1 线控转向(SBW)系统电气架构示意图
►方向盘执行器(Handwheel Actuator, HWA):主要由方向盘、转向管柱、减速器、TAS传感器、冗余电控单元组成,主要功能是获取驾驶员的意图,并将驾驶员期望的方向盘转角信号给到前轮执行器(RWA),同时根据前轮执行器反馈的齿条力模拟车辆行驶的路面反馈力,为驾驶员提供路感反馈信息。
►前轮执行器(Road Wheel Actuator, RWA):前轮执行器有机械转向器、转角传感器、冗余电控单元等组成,主要功能是接收方向盘执行器(HWA)发送的期望转角指令,并通过控制电机实现齿条的横向移动,最终实现转向功能。
►冗余电控单元(Fail-Operational Powerpack):方向盘执行器(HWA)和前轮执行器(RWA)均需要电控单元作为执行器,分别实现路感反馈控制和前轮转向的功能。而采用冗余的电控单元主要是为了支持高阶自动驾驶工况,即在自动驾驶场景下,如果线控转向(SBW)系统的方向盘执行器(HWA)或前轮执行器(RWA)出现了任何一种单点失效,该部件要具备失效可运行的功能(Fail-Operational)来保证路感不丢失或者前轮不失去转向能力。英创汇智线控转向(SBW)系统的方向盘执行器(HWA)和前轮执行器(RWA)电控单元均采用了全冗余电控方案驱动六相永磁同步电机的方案,单点失效后系统仍然具备路感反馈以及执行转向控制的能力。
►转角传感器(AngleSensor):前轮执行器(RWA)需要精准地跟踪期望转角,因此需要转角传感器测量实际的小齿轮输入转角。
2.2 线控转向的电气架构
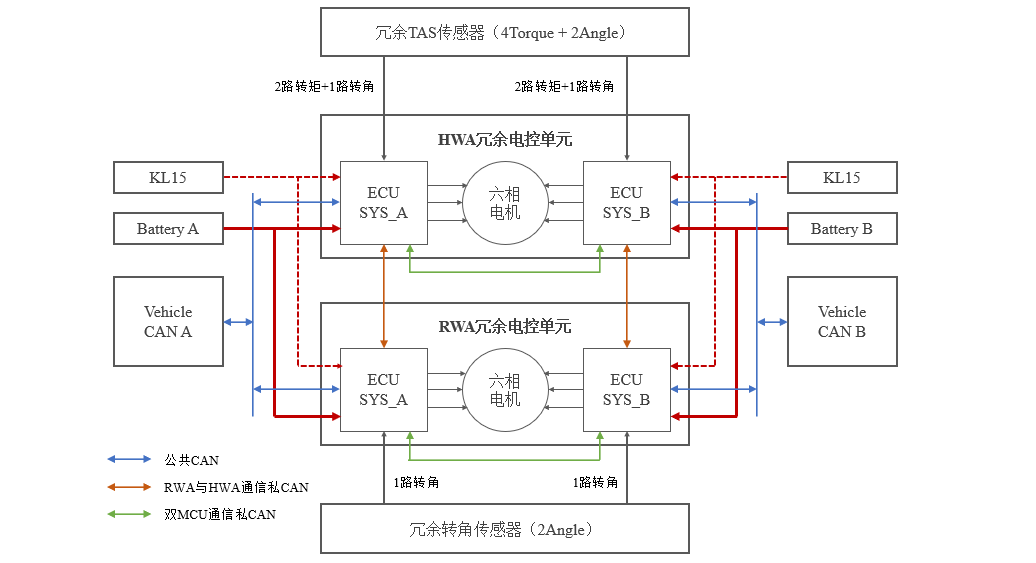
图2-2 线控转向(SBW)系统电气架构示意图
如图2-2所示为英创汇智线控转向(SBW)系统的电气架构示意图,其中车辆具备冗余的电源、公共CAN通信网络,方向盘执行器(HWA)和前轮执行器(RWA)均采用全冗余的电控单元,分别接入不同的电源和CAN通信网络,实现独立的两个系统外部的电气隔离。全冗余电控单元两个ECU之间也通过CAN通信来实现信号交互,从而可以进行信号交互、协同控制。方向盘执行器(HWA)和前轮执行器(RWA)之间通过私CAN进行通信,传递期望转角信号、齿条力信号等。方向盘执行器(HWA)的每个ECU需要采集双路转矩信号与单路的绝对转角信号(支持功能安全ASIL D等级),因此对应“4+2”的TAS传感器;前轮执行器(RWA)每个ECU需要采集单路的绝对转角信号(支持功能安全ASIL D等级),因此对应2路转角信号的角度传感器。
2.3线控转向的算法架构
如图2-3所示为英创汇智线控转向(SBW)系统算法架构示意图。根据方向盘执行器(HWA)的功能可知主要实现的算法包含参考手力计算、力矩叠加控制、手力跟踪控制、转角叠加控制、变传动比控制、转角指令计算等。可以看出,线控转向(SBW)系统中,方向盘执行器(HWA)实现驾驶员的手感控制依靠力矩闭环的算法,这是与传统EPS的开环力矩算法完全不同的。前轮执行器(RWA)的主要算法包含转角跟踪控制以及齿条力估计算法。转角跟踪控制通过转角传感器测量小齿轮转角作为反馈信号,实现转角的闭环控制,进而实现精准的转向控制。齿条力估计算法对转向器的齿条力进行观测,并作为路感反馈信号发送给方向盘执行器(HWA),实现路感反馈模拟计算。
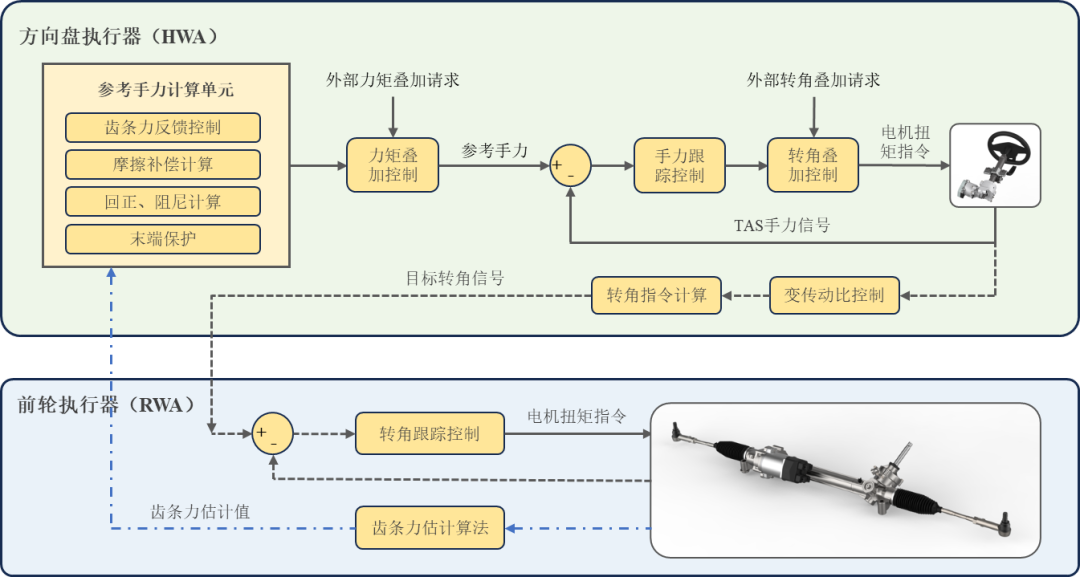
图2-3 线控转向(SBW)系统算法架构示意图
3►
英创汇智T-SBW关键技术
3.1 齿条力观测
如图3-1所示为线控转向前轮执行器(RWA)的齿条力估计算法架构,其中分别采用了基于车辆模型的齿条力估算方法(Vehicle Estimator)和基于转向系统模型的估算方法(Steering Estimator)。
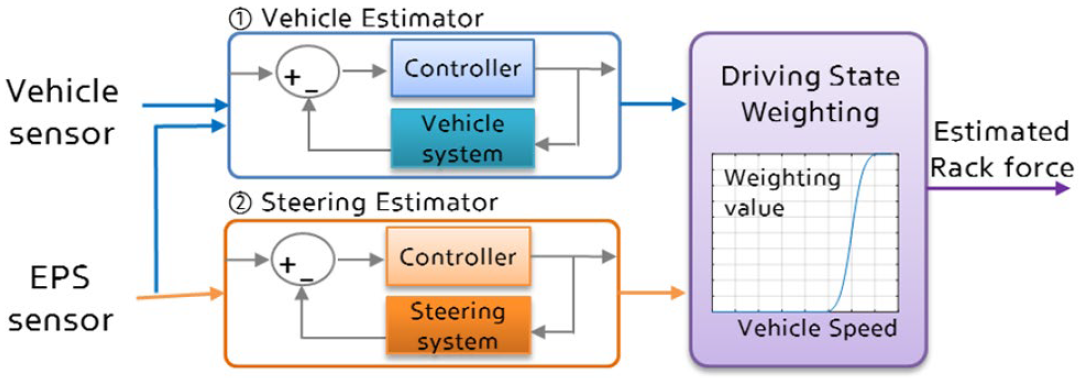
图3-1 齿条力估计算法示意图
图片来源:Kim, C., Son, D., Sabato, Z., and Lee,B.,"ImprovementofSteeringPerformanceUsingSteeringRackForceControl,"SAETechnicalPaper2019-01-1234,2019,https://doi.org/10.427/2019-01-1234.
Vehicle Estimator使用了车辆的二自由度模型,根据车辆的横向加速度、横摆角速度、方向盘转速对齿条力进行估算;Steering Estimator使用了简化的转向系统动力学模型,通过小齿轮角速度、助力电机转速、助力电机输出转矩等对齿条力进行估算。在车辆速度较低时,基于车辆的二自由度模型估算误差较大,Steering Estimator的性能优于Vehicle Estimator;车速较高时,基于车辆的二自由度模型估算齿条力能达到较高的精度,此时Vehicle Estimator的性能优于Steering Estimator。因此,实际应用根据车速信号对两种算法的估算结果进行调和(Driving State Weighting),从而得出在全工况都较优的估算结果。
3.2 力矩闭环算法
如图3-2所示为方向盘执行器的力矩闭环算法。首先根据齿条力估算的结果进行路感反馈控制,首先对齿条力进行适当的滤波,滤除高频的振动信号,然后基于路感反馈的MAP确定初始目标手力。这部分相比传统EPS开环控制的Boost Curve实现了直接设定目标手力,对于手感风格的调试更加方便。为了进一步优化驾驶手感,增加主动回正、阻尼控制的手力分量计算。主动回正功能模拟传统EPS的回正效果,提升驾驶体验。阻尼控制增加系统的稳定性,防止方向盘在回正过程中出现“摇头”现象。力矩闭环算法已经将系统的摩擦力完全补偿掉,因此无需对系统的摩擦力进行额外的补偿,但是适当地“重构”系统的摩擦力,可以让手感更加真实、体验更好,另外也可以防止过度转向。手力跟踪控制模块要求能够对参考手力进行精确的跟踪控制,并且具有较快的响应速度和较强的鲁棒性。此外,参考手力闭环跟踪控制算法要具有较好的稳定性。
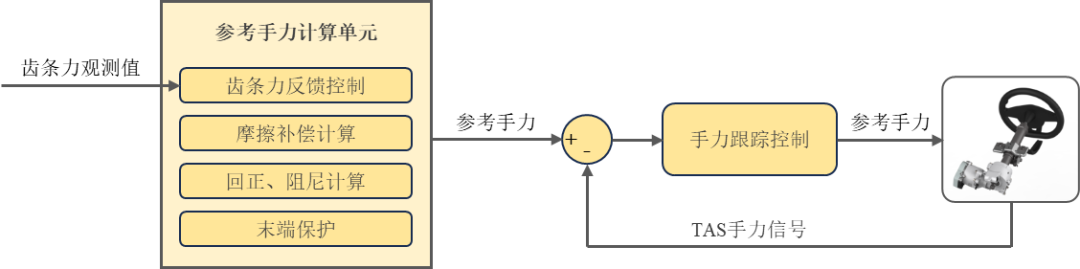
图3-2 HWA力矩闭环算法示意图
3.3 线控转向高级功能
►驾驶手感定制:
线控转向(SBW)相比传统的EPS去掉了中间轴机械连接,而且采用力矩闭环算法对参考手力进行跟踪,因此可以灵活地设计驾驶手感的风格。相比传统的EPS通常仅有舒适、标准、运动几种风格,线控转向(SBW)具备更多的可性能,甚至可以根据驾驶员的喜好进行定制化调整。
►可折叠方向盘:
传统的EPS方向盘可调的范围非常有限,因此及时在自动驾驶(如APA/TJP/HWP等)的工况下,方向盘也会一直随转。线控转向(SBW)取消机械连接之后,驾驶员可以选择在自动驾驶的场景下把方向盘折叠起来,释放更多的驾驶舱空间用于休息、娱乐或者工作。
►可变转向速比:
可变转向速比功能可以兼顾低车速工况下的灵活性以及高车速工况下的稳定性,或者可以调节方向盘在On-Center、Off-Center区间的转向灵敏度。传统的EPS由于存在刚性的机械连接,因此要实现可变转向速比需要改变机械结构,如齿轮齿条传动结构、转向管柱结构,结构和控制复杂且成本较高。而对于线控转向(SBW),可变转向速比通过软件算法就可以实现,具有极大的灵活性,可以在安全范围内进行灵活的定义,针对不同的场景可以实现最优的驾驶体验,如赛车模式、舒适模式、运动模式等。
►自动紧急转向:
自动紧急转向(Automatic Emergency Steering, AES)是一个在开阔道路下能够有效避免车辆碰撞的功能,传统的EPS在实现AES功能时,方向盘要在很短时间内快速转过一个角度,而此时通常驾驶员的手还在接触方向盘,因此很容易出现AES功能与驾驶员控制的冲突,甚至引起驾驶员的恐慌。但是对于线控转向(SBW)系统来说,自动紧急转向功能激活时,可以在不控制方向盘的情况下在很短的时间内完成紧急避撞的任务,更加安全。
►路面干扰抑制:
线控转向系统(SBW)移除机械连接的同时也切断了噪音从轮胎传递到驾驶员的路径,因此可以更好地实现对路面无效干扰信号的抑制,降低机械噪音,让驾驶舱更加安静,有效提升驾驶体验。
►信息娱乐功能:
随着汽车座舱的智能化程度越来越高,驾驶舱已经成为很多消费者的第二休息空间,具备越来越多的信息娱乐功能。而线控转向系统(SBW)在移除机械连接之后,方向盘可以单独作为一个执行器工作,因此可以用来与智能座舱联动,作为游戏方向盘来使用,并支持力反馈、振动提醒等功能。
4►
小结
线控转向(SBW)技术相比传统的EPS具有更高的技术壁垒,开发难度更大、开发成本更高,但是线控转向(SBW)技术能够支持L4级以上的自动驾驶功能,并且能够为汽车带来很多新的功能,显著提升驾驶体验,因此是汽车转向系统发展的必然趋势。
随着线控技术的不断发展,线控转向系统(SBW)技术也越来越成熟。主流的转向供应商博世、采埃孚、耐世特、万都等都已经完成了SBW产品的开发,并预计在2025年之前完成量产。国内零部件企业相比国际主流的供应商起步较晚,但是在国家战略的推动下,也在快速地追赶。英创汇智T-SBW解决方案让汽车更加智能、更加安全、更加具有驾驶乐趣,能够帮助客户打造更受消费者喜爱的产品。
审核编辑:彭菁
-
线控
+关注
关注
0文章
17浏览量
6875 -
智能汽车
+关注
关注
30文章
2929浏览量
107774 -
自动驾驶
+关注
关注
788文章
14002浏览量
167715 -
英创汇智
+关注
关注
0文章
30浏览量
558
原文标题:高阶自动驾驶核心部件:英创汇智线控转向解决方案
文章出处:【微信号:trinova-tech,微信公众号:英创汇智】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
为汽车ADAS营造更加安全的行驶环境
物联网助力楼宇更加环保智能
什么是全方位汽车安全解决方案?
基于HereO提供“即插即用”的物联网解决方案让产品变得更加智能化
英创汇智完成最新一轮融资 用于ESC/EPBi、EBooster智能制造基地建设
智能语音吸顶灯解决方案:让家居更加智能化和智能交互

汽车智能线控技术领航者英创汇智亮相2023 ICVS中国自动驾驶博览会

线控底盘企业英创汇智连获两大奖 英创汇智这个双十一收获满满






 工商网监
工商网监
评论