 KUKA机器人的”Dry run空转”概念
KUKA机器人的”Dry run空转”概念
KUKA机器人的”Dry run空转”概念.
空转如果自动运行中程序运行中断,并且机器人离开程序编定的轨道,则将进行空转。
如果在子程序中导致空转,则只在该子程序中执行空转运行。空转运行并不涉及调用该子程序的那个程序。
可能发生下列情况:
1.语句选择
2.取消程序
3.反向运行
4.因非轨道停机、停机制动器损坏或由用户手动移动而离开轨道。
在这些情况下,控制器将数字、二进制和模拟的输出端、存储器和旗标均置为 FALSE。此后机器人移至轨道上下一个程序编定的位置。到达该位置时将进行空转。之前重置的信号将被相应赋值,就好象程序结束运行时已到达此位置。程序运行可继续进行。
如果在一次空转之后将继续进行程序运行,则控制器的运行情况可能会与程序编定的不同。
请注意下列空转运行和程序运行之间的区别:
1.空转过程中只可访问输入端的当前状态。而该输入端在程序运行中可能有另外的数值。
2.系统输出端和那些由输入端决定而被赋值的输出端将不被考虑。
3.程序循环、跳转和等待语句以及子程序调用将不被考虑。
4.计数操作和定时器将不被考虑。
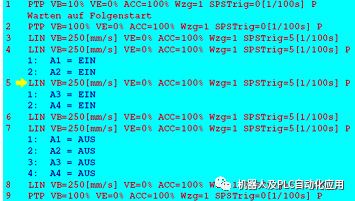
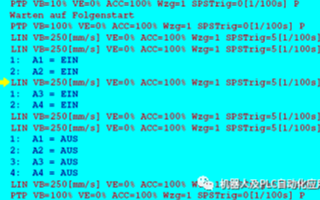
例如程序运行会由于行 5 处的语句选择而在行 6 处被中断。在行 6 处输出端 A1... A4 为 TRUE。这些输出端现在被置为 FALSE。随着 SAK 移动将缓慢地直接驶至所选择的运动语句。到达行 5 时机器人将停止,并执行空转,且输出端 A1 和 A2 将重新被置为 TRUE。程序运行可继续进行。
取消程序
当取消程序时,则所有输出端、标记器和旗标均将被置为 FALSE。
反向运行
点击启动反向运行键,所有输出端、标记器和旗标均被赋值为 FALSE。将按程序编定的轨道反向运行。此时将不考虑逻辑指令及子程序调用。如果通过按下启动正向运行键重新改变方向,则将执行空转运行。
离开轨道
离开轨道时,将只有数字和模拟输出端被重置。二进制输出端、标记器和旗标的状态均不更改。通过启动键可将机器人重置回它离开轨道的位置处。空转之后数字和模拟输出端将被置为离开轨道之前的状态。
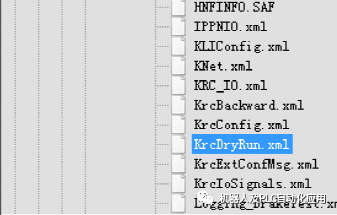
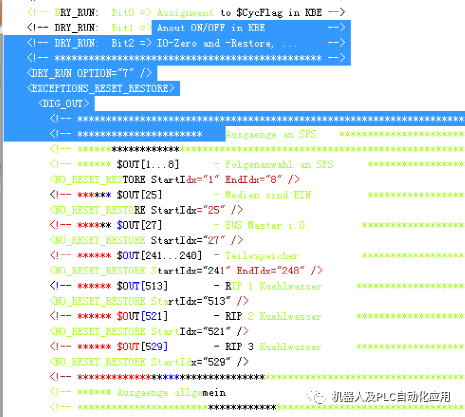
在执行空运行时用来保持常量的文件”KrcDryRun.xml”.
----------------------------END----------------------------------
每天进步一点点
Make small but daily progress
KUKAC4-VASS机器人抓手设置(全)
KUKA机器人C4外部自动控制最终版
KUKA VW 提交解释器
KUKA 机器人视觉抓取的工作原理及Ethernet KRL软件控制讲解
涂胶设备原理及KUKA机器人控制分析+MAKRO
审核编辑:彭菁
-
控制器
+关注
关注
112文章
16332浏览量
177808 -
存储器
+关注
关注
38文章
7484浏览量
163763 -
程序
+关注
关注
117文章
3785浏览量
81004 -
KUKA机器人
+关注
关注
4文章
143浏览量
9071
原文标题:KUKA C4干运行 KrcDryRun.
文章出处:【微信号:gh_a8b121171b08,微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
KUKA机器人问题解答
库卡KUKA机器人四种启动方式介绍
KUKA库卡机器人伺服驱动器相关型号举例
KUKA焊接机器人伺服电机常见故障及维修处理
工业机器人组成结构相关资料分享
库卡机器人MGV电源模块维修
机器人系统与控制需求简介
没有有前辈用LabVIEW控制kuka机器人c2的经验?通讯是怎么做到的?
KUKA机器人相关分类及型号一览





 工商网监
工商网监
评论