 OpenHarmony:如何使用HDF平台驱动控制PWM
OpenHarmony:如何使用HDF平台驱动控制PWM
1、程序介绍
本程序是基于OpenHarmony标准系统编写的平台驱动案例:PWM
2、基础知识
2.1、PWM概述
PWM(Pulse Width Modulation)即脉冲宽度调制,是一种对模拟信号电平进行数字编码并将其转换为脉冲的技术,广泛应用在从测量、通信到功率控制与变换的许多领域中。通常情况下,在使用马达控制、背光亮度调节时会用到PWM模块。
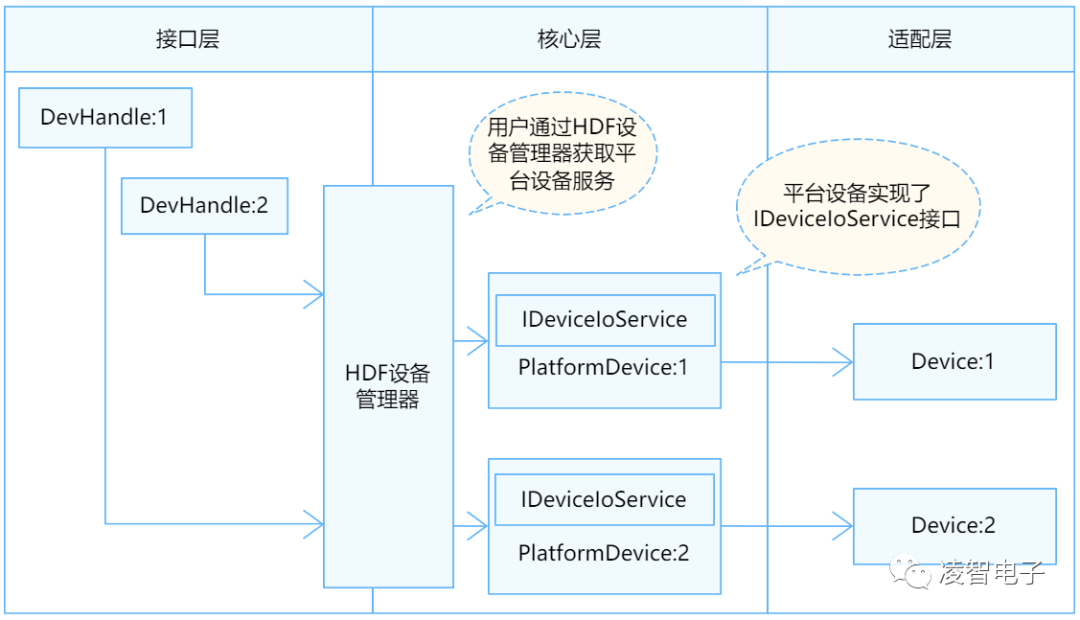
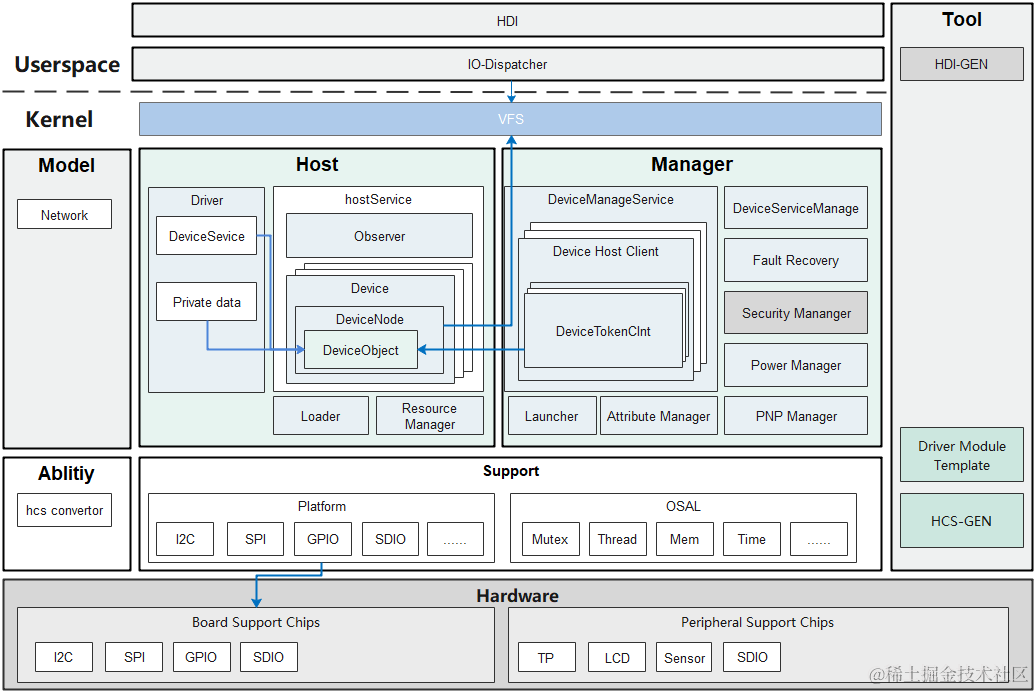
在HDF框架中,PWM接口适配模式采用独立服务模式(如图1所示)。在这种模式下,每一个设备对象会独立发布一个设备服务来处理外部访问,设备管理器收到API的访问请求之后,通过提取该请求的参数,达到调用实际设备对象的相应内部方法的目的。独立服务模式可以直接借助HDF设备管理器的服务管理能力,但需要为每个设备单独配置设备节点,增加内存占用。
独立服务模式下,核心层不会统一发布一个服务供上层使用,因此这种模式下驱动要为每个控制器发布一个服务,具体表现为:
驱动适配者需要实现HdfDriverEntry的Bind钩子函数以绑定服务。
device_info.hcs文件中deviceNode的policy字段为1或2,不能为0。
PWM模块各分层作用:
接口层提供打开PWM设备、设置PWM设备周期、设置PWM设备占空时间、设置PWM设备极性、设置PWM设备参数、获取PWM设备参数、使能PWM设备、禁止PWM设备、关闭PWM设备的接口。
核心层主要提供PWM控制器的添加、移除以及管理的能力,通过钩子函数与适配层交互。
适配层主要是将钩子函数的功能实例化,实现具体的功能。
PWM独立服务模式结构图,如下图所示:
2.2、PWM驱动开发
2.2.1、PWM驱动开发接口
为了保证上层在调用PWM接口时能够正确的操作PWM控制器,核心层在//drivers/hdf_core/framework/support/platform/include/pwm/pwm_core.h中定义了以下钩子函数,驱动适配者需要在适配层实现这些函数的具体功能,并与钩子函数挂接,从而完成适配层与核心层的交互。
PwmMethod定义:
struct PwmMethod { int32_t (*setConfig)(struct PwmDev *pwm, struct PwmConfig *config); int32_t (*open)(struct PwmDev *pwm); int32_t (*close)(struct PwmDev *pwm);};
PwmMethod结构体成员的钩子函数功能说明:

2.2.2、PWM驱动开发步骤
PWM模块适配包含以下四个步骤:
驱动实例化驱动入口。
配置属性文件。
实例化PWM控制器对象。
驱动调试。
我们以///drivers/hdf_core/adapter/khdf/linux/platform/pwm/pwm_adapter.c为例(该PWM驱动是建立于Linux PWM子系统基础上创建)。
2.2.2.1、驱动实例化驱动入口
驱动入口必须为HdfDriverEntry(在hdf_device_desc.h中定义)类型的全局变量,且moduleName要和device_info.hcs中保持一致。HDF框架会将所有加载的驱动的HdfDriverEntry对象首地址汇总,形成一个类似数组的段地址空间,方便上层调用。一般在加载驱动时HDF会先调用Bind函数,再调用Init函数加载该驱动。当Init调用异常时,HDF框架会调用Release释放驱动资源并退出。
PWM驱动入口开发参考:
struct HdfDriverEntry g_hdfPwm = { .moduleVersion = 1, .moduleName = "HDF_PLATFORM_PWM", .Bind = HdfPwmBind, .Init = HdfPwmInit, .Release = HdfPwmRelease,};
HDF_INIT(g_hdfPwm);
2.2.2.2、配置属性文件
完成驱动入口注册之后,需要在device_info.hcs文件中添加deviceNode信息,deviceNode信息与驱动入口注册相关。本例以两个PWM控制器为例,如有多个器件信息,则需要在device_info.hcs文件增加对应的deviceNode信息。器件属性值与核心层PwmDev成员的默认值或限制范围有密切关系,比如PWM设备号,需要在pwm_config.hcs文件中增加对应的器件属性。
本次案例以rk3568为案例(即文件//vendor/lockzhiner/rk3568/hdf_config/khdf/device_info/device_info.hcs),添加deviceNode描述,具体修改如下:
device_pwm :: device { device0 :: deviceNode { // 为每一个PWM控制器配置一个HDF设备节点 policy = 2; // 标识向内核和用户态发布服务 priority = 80; // 驱动启动优先级 permission = 0644; // 驱动创建设备节点权限 moduleName = "HDF_PLATFORM_PWM"; // 【必要】用于指定驱动名称,需要与期望的驱动Entry中的moduleName一致 serviceName = "HDF_PLATFORM_PWM_0"; // 【必要且唯一】驱动对外发布服务的名称 deviceMatchAttr = "linux_pwm_adapter_0"; // 【必要】用于配置控制器私有数据,要与pwm_config.hcs中对应控制器保持一致,具体的控制器信息在pwm_config.hcs中 } device1 :: deviceNode { policy = 2; priority = 80; permission = 0644; moduleName = "HDF_PLATFORM_PWM"; serviceName = "HDF_PLATFORM_PWM_1"; deviceMatchAttr = "linux_pwm_adapter_1"; } device2 :: deviceNode { policy = 2; priority = 80; permission = 0644; moduleName = "HDF_PLATFORM_PWM"; serviceName = "HDF_PLATFORM_PWM_2"; deviceMatchAttr = "linux_pwm_adapter_2"; } device3 :: deviceNode { policy = 2; priority = 80; permission = 0644; moduleName = "HDF_PLATFORM_PWM"; serviceName = "HDF_PLATFORM_PWM_3"; deviceMatchAttr = "linux_pwm_adapter_3"; } device4 :: deviceNode { policy = 2; priority = 80; permission = 0644; moduleName = "HDF_PLATFORM_PWM"; serviceName = "HDF_PLATFORM_PWM_4"; deviceMatchAttr = "linux_pwm_adapter_4"; }}
pwm_config.hcs 配置参考//vendor/lockzhiner/rk3568/hdf_config/khdf/platform/pwm_config.hcs,具体修改如下:
root { platform { pwm_config { template pwm_device { // 【必要】配置模板,如果下面节点使用时继承该模板,则节点中未声明的字段会使用该模板中的默认值 serviceName = ""; // 对外服务名称,必须是唯一 match_attr = ""; // 【必要】需要和device_info.hcs中的deviceMatchAttr值一致 num = 0; // 【必要】设备号 }
device_pwm_0x00000000 :: pwm_device { // 存在多个设备时,请逐一添加相关HDF节点和设备节点信息。 num = 0; match_attr = "linux_pwm_adapter_0"; // 【必要】需要和device_info.hcs中的deviceMatchAttr值一致 }
device_pwm_0x00000001 :: pwm_device { num = 1; match_attr = "linux_pwm_adapter_1"; }
device_pwm_0x00000002 :: pwm_device { num = 2; match_attr = "linux_pwm_adapter_2"; }
device_pwm_0x00000003 :: pwm_device { num = 3; match_attr = "linux_pwm_adapter_3"; }
device_pwm_0x00000004 :: pwm_device { num = 4; match_attr = "linux_pwm_adapter_4"; } } }}
2.2.2.3、实例化PWM控制器对象
完成驱动入口注册之后,下一步就是以核心层PwmDev对象的初始化为核心,包括驱动适配者自定义结构体(传递参数和数据),实例化PwmDev成员PwmMethod(让用户可以通过接口来调用驱动底层函数),实现HdfDriverEntry成员函数(Bind、Init、Release)。
static int32_t HdfPwmOpen(struct PwmDev *pwm);static int32_t HdfPwmClose(struct PwmDev *pwm);static int32_t HdfPwmSetConfig(struct PwmDev *pwm, struct PwmConfig *config);
// 定义PwmDev成员PwmMethod,实现相应接口struct PwmMethod g_pwmOps = { .setConfig = HdfPwmSetConfig, .open = HdfPwmOpen, .close = HdfPwmClose,};
static int32_t HdfPwmBind(struct HdfDeviceObject *obj);static int32_t HdfPwmInit(struct HdfDeviceObject *obj){ ...... pwm->cfg.number = 0; pwm->num = num; pwm->method = &g_pwmOps; // 将PwmMethod绑定到pwm->method pwm->busy = false; ret = PwmDeviceAdd(obj, pwm); // 添加Pwm设备到PWM列表中 if (ret != HDF_SUCCESS) { HDF_LOGE("%s: error probe, ret is %d", __func__, ret); OsalMemFree(pwm); } ......}static void HdfPwmRelease(struct HdfDeviceObject *obj);
2.2.2.4、驱动调试
建议先在Linux下修改确认,再移植到OpenHarmony。
2.3、PWM应用开发
通常情况下,在使用马达控制、背光亮度调节时会用到PWM模块。
2.3.1、接口说明
PWM模块提供的主要接口如下表所示,具体API详见//drivers/hdf_core/framework/include/platform/pwm_if.h。
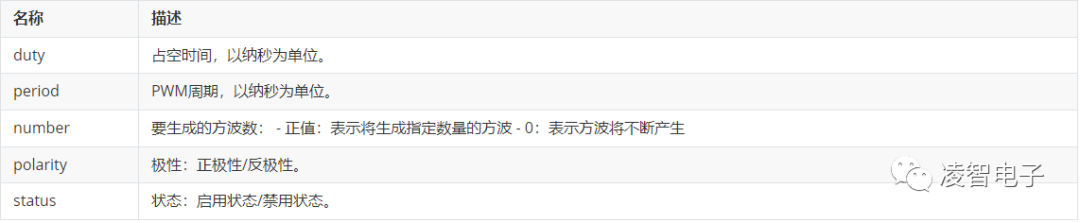
PwmConfig结构体介绍如下所示:
 PWM驱动API接口功能介绍如下所示:
PWM驱动API接口功能介绍如下所示:

(1)PwmOpen
在操作PWM设备时,首先要调用PwmOpen获取PWM设备句柄,该函数会返回指定设备号的PWM设备句柄。
DevHandle PwmOpen(uint32_t num);
PwmOpen参数定义如下:
 PwmOpen返回值定义如下:
PwmOpen返回值定义如下:
 假设系统中的PWM设备号为0,获取该PWM设备句柄的示例如下:
假设系统中的PWM设备号为0,获取该PWM设备句柄的示例如下:
uint32_t num = 0; // PWM设备号DevHandle handle = NULL;
handle = PwmOpen(num); // 打开PWM 0设备并获取PWM设备句柄if (handle == NULL) { HDF_LOGE("PwmOpen: open pwm_%u failed.\n", num); return;}
(2)PwmClose
关闭PWM设备,系统释放对应的资源。
void PwmClose(DevHandle handle);
PwmClose参数定义如下:
 PwmClose返回值定义如下:
PwmClose返回值定义如下:

(3)PwmEnable
使能PWM设备。
int32_t PwmEnable(DevHandle handle);
PwmEnable参数定义如下:
 PwmEnable返回值定义如下:
PwmEnable返回值定义如下:

(4)PwmDisable
禁用PWM设备。
int32_t PwmDisable(DevHandle handle);
PwmDisable参数定义如下:

PwmDisable返回值定义如下:

(5)PwmSetPeriod
设置PWM设备周期
int32_t PwmSetPeriod(DevHandle handle, uint32_t period);
PwmSetPeriod参数定义如下:
 PwmSetPeriod返回值定义如下:
PwmSetPeriod返回值定义如下:

(6)PwmSetDuty
设置PWM设备占空时间。
int32_t PwmSetDuty(DevHandle handle, uint32_t duty);
PwmSetDuty参数定义如下:
 PwmSetDuty返回值定义如下:
PwmSetDuty返回值定义如下:

(7)PwmSetPolarity
设置PWM设备极性。
int32_t PwmSetPolarity(DevHandle handle, uint8_t polarity);
PwmSetDuty参数定义如下:
 PwmSetDuty返回值定义如下:
PwmSetDuty返回值定义如下:

(8)PwmSetConfig
设置PWM设备参数。
int32_t PwmSetConfig(DevHandle handle, struct PwmConfig *config);
PwmSetConfig参数定义如下:

PwmSetConfig返回值定义如下:

(9)PwmGetConfig
获取PWM设备参数。
int32_t PwmGetConfig(DevHandle handle, struct PwmConfig *config);
PwmGetConfig参数定义如下:

PwmGetConfig返回值定义如下:

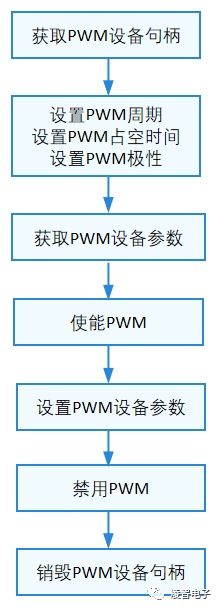
2.2.2、开发流程
使用PWM的一般流程如下图所示:
3、程序解析
3.1、准备工作
查看《凌蒙派-RK3568开发板排针说明表》(即Git仓库的//docs/board/凌蒙派-RK3568开发板排针说明表v1.0.xlsx),选中PWM7_IR(即GPIO0_C6)。
3.2、Linux内核解析
3.2.1、创建Linux内核Git
请参考《OpenHarmony如何为内核打patch》(即Git仓库的//docs/OpenHarmony如何为内核打patch.docx)。
3.2.2、修改设备树PWM7配置
修改//arch/arm64/boot/dts/rockchip/rk3568-lockzhiner.dtsi(即该目录是指已打Patch后的Linux内核,不是OpenHarmony主目录),具体如下所示:
&pwm7 { status = "okay";};
3.2.3、创建内核patch
请参考《OpenHarmony如何为内核打patch》(即Git仓库的//docs/OpenHarmony如何为内核打patch.docx)。
3.2.4、替换OpenHarmony的内核patch
将制作出的kernel.patch替换到//kernel/linux/patches/linux-5.10/rk3568_patch/kernel.patch即可。
3.3、OpenHarmony配置树配置
该部分不用特殊配置,本开发案例已经编写好。
3.3.1、device_info.hcs
//vendor/lockzhiner/rk3568/hdf_config/khdf/device_info/device_info.hcs已定义好,具体如下:
device_pwm :: device { device0 :: deviceNode { policy = 2; priority = 80; permission = 0644; moduleName = "HDF_PLATFORM_PWM"; serviceName = "HDF_PLATFORM_PWM_0"; deviceMatchAttr = "linux_pwm_adapter_0"; } device1 :: deviceNode { policy = 2; priority = 80; permission = 0644; moduleName = "HDF_PLATFORM_PWM"; serviceName = "HDF_PLATFORM_PWM_1"; deviceMatchAttr = "linux_pwm_adapter_1"; } device2 :: deviceNode { policy = 2; priority = 80; permission = 0644; moduleName = "HDF_PLATFORM_PWM"; serviceName = "HDF_PLATFORM_PWM_2"; deviceMatchAttr = "linux_pwm_adapter_2"; } device3 :: deviceNode { policy = 2; priority = 80; permission = 0644; moduleName = "HDF_PLATFORM_PWM"; serviceName = "HDF_PLATFORM_PWM_3"; deviceMatchAttr = "linux_pwm_adapter_3"; } device4 :: deviceNode { policy = 2; priority = 80; permission = 0644; moduleName = "HDF_PLATFORM_PWM"; serviceName = "HDF_PLATFORM_PWM_4"; deviceMatchAttr = "linux_pwm_adapter_4"; }}
注意:policy必须为2,表示对内核态和用户态提供服务。否则,应用程序无法调用。
3.3.2、pwm_config.hcs
//vendor/lockzhiner/rk3568/hdf_config/khdf/platform/pwm_config.hcs,具体内容如下:
root { platform { pwm_config { template pwm_device { serviceName = ""; match_attr = ""; num = 0; }
device_pwm_0x00000000 :: pwm_device { num = 0; match_attr = "linux_pwm_adapter_0"; }
device_pwm_0x00000001 :: pwm_device { num = 1; match_attr = "linux_pwm_adapter_1"; }
device_pwm_0x00000002 :: pwm_device { num = 2; match_attr = "linux_pwm_adapter_2"; }
device_pwm_0x00000003 :: pwm_device { num = 3; match_attr = "linux_pwm_adapter_3"; }
device_pwm_0x00000004 :: pwm_device { num = 4; match_attr = "linux_pwm_adapter_4"; } } }}
注意:上述的num为PwmOpen(uint32_t num),它是Linux PWM的排序序号(即PWM7的num是排列序号3,从0开始排序),不是特指PWM实际编号(即PWM7)。
3.4、OpenHarmony PWM平台驱动
在//drivers/hdf_core/adapter/khdf/linux/platform/pwm/pwm_adapter.c已编写对接Linux PWM驱动的相关代码,具体内容如下:
struct HdfDriverEntry g_hdfPwm = { .moduleVersion = 1, .moduleName = "HDF_PLATFORM_PWM", .Bind = HdfPwmBind, .Init = HdfPwmInit, .Release = HdfPwmRelease,};
HDF_INIT(g_hdfPwm);
3.5、应用程序
3.5.1、pwm_test.c
PWM相关头文件如下所示:
#include "pwm_if.h" // PWM标准接口头文件
主函数定义PWM接口调用,具体如下:
int main(int argc, char* argv[]){ DevHandle handle = NULL; int32_t ret;...... // 打开pwm设备 handle = PwmOpen(m_pwm_device_id); if (handle == NULL) { PRINT_ERROR("PwmOpen failed\n"); return -1; }
// 配置pwm设备 ret = PwmSetCfg_Ext1(handle, m_pwm_period, m_pwm_duty, m_pwm_polarity, m_pwm_status, m_pwm_wave_number); // ret = PwmSetCfg_Ext2(handle, m_pwm_period, m_pwm_duty, m_pwm_polarity, m_pwm_status, m_pwm_wave_number); if (ret != 0) { PRINT_ERROR("PwmSetCfg_Ext failed and ret = %d\n", ret); // 关闭pwm设备 PwmClose(handle); return -1; }
printf("Pwm enable successful and pwm device id(%d), period(%d), duty(%d), polarity(%d), status(%d), number(%d)\n", m_pwm_device_id, m_pwm_period, m_pwm_duty, m_pwm_polarity, m_pwm_status, m_pwm_wave_number);
// 关闭pwm设备 PwmClose(handle);
return 0;}
其中,PwmSetCfg_Ext1函数定义如何配置PWM相关参数,具体如下所示:
/**************************************************************** 函数名称: PwmSetCfg_Ext1* 说 明: 设置PWM相关属性,使用PwmSetConfig等接口* 参 数: * @handle: PWM设备句柄* @period: PWM设备周期* @duty: PWM设备占空时间* @polarity: PWM设备极性* @status: PWM使能/禁用* @number: PWM产生方波的数目* 返 回 值: 0为成功,反之为失败***************************************************************/int32_t PwmSetCfg_Ext1(DevHandle handle, uint32_t period, uint32_t duty, uint8_t polarity, uint8_t status, uint32_t number){ int32_t ret; struct PwmConfig config;
// 判断handle是否为空 if (handle == NULL) { PRINT_ERROR("handle is error\n"); return -1; }
// 获取pwm设备参数 ret = PwmGetConfig(handle, &config); if (ret != 0) { PRINT_ERROR("PwmGetConfig failed and ret = %d\n", ret); return -1; }
// 设置config config.period = period; config.duty = duty; config.polarity = polarity; config.status = status; config.number = number;
// 设置pwm设备参数 ret = PwmSetConfig(handle, &config); if (ret != 0) { PRINT_ERROR("PwmSetConfig failed and ret = %d\n", ret); return -1; }
return 0;}
3.5.2、BUILD.gn
编写应用程序的BUILD.gn,具体内容如下:
import("//build/ohos.gni")import("//drivers/hdf_core/adapter/uhdf2/uhdf.gni")
print("samples: compile rk3568_pwm_test")ohos_executable("rk3568_pwm_test") { sources = [ "pwm_test.c" ] include_dirs = [ "$hdf_framework_path/include", "$hdf_framework_path/include/core", "$hdf_framework_path/include/osal", "$hdf_framework_path/include/platform", "$hdf_framework_path/include/utils", "$hdf_uhdf_path/osal/include", "$hdf_uhdf_path/ipc/include", "//base/hiviewdfx/hilog/interfaces/native/kits/include", "//third_party/bounds_checking_function/include", ]
deps = [ "$hdf_uhdf_path/platform:libhdf_platform", "$hdf_uhdf_path/utils:libhdf_utils", "//base/hiviewdfx/hilog/interfaces/native/innerkits:libhilog", ]
cflags = [ "-Wall", "-Wextra", "-Werror", "-Wno-format", "-Wno-format-extra-args", ]
part_name = "product_rk3568" install_enable = true}
3.5.3、参与应用程序编译
编辑//vendor/lockzhiner/rk3568/samples/BUILD.gn,开启编译选项。具体如下:
"b05_platform_device_pwm/app:rk3568_pwm_test",
4、程序编译
建议使用docker编译方法,运行如下:
hb set -root .hb set# 选择lockzhiner下的rk3568编译分支。hb build -f
5、运行结果
运行如下:
# rk3568_pwm_test -P 40000000 -d 20000000 -p 0 -s 1 -n 1000000 -i 3pwm id: 3pwm period: 40000000pwm duty: 20000000pwm polarity: 0pwm status: 1pwm wave number: 1000000Pwm enable successful and pwm device id(3), period(40000000), duty(20000000), polarity(0), status(1), number(1000000)#
使用示波器连接排线的0_C6(即GPIO0_C6,即PWM7),可以看到如下:

-
PWM
+关注
关注
114文章
5201浏览量
215030 -
开发板
+关注
关注
25文章
5139浏览量
98378 -
驱动控制
+关注
关注
0文章
122浏览量
15804 -
OpenHarmony
+关注
关注
25文章
3753浏览量
16694
发布评论请先 登录
相关推荐
迅为RK3568开发板篇OpenHarmony实操HDF驱动控制LED-编写应用APP
迅为RK3568开发板篇OpenHarmony实操HDF驱动控制LED-添加内核编译
迅为RK3568开发板篇OpenHarmony实操HDF驱动控制LED-接口函数
迅为RK3568开发板篇OpenHarmony实操HDF驱动控制LED-编写内核 LED HDF 驱动程序
迅为RK3568开发板篇OpenHarmony配置HDF驱动控制LED-新增 topeet子系统-编写 bundle.json文件
迅为RK3568开发板篇OpenHarmony配置HDF驱动控制LED-新增 topeet子系统
迅为RK3568开发板篇OpenHarmony配置HDF驱动控制LED-配置创建私有配置文件
迅为RK3568开发板篇OpenHarmony配置HDF驱动控制LED-修改HCS硬件配置
PWM驱动电阻太小会怎么样
PWM驱动电机发热的原因
pwm驱动电机对频率有啥要求
PWM驱动电机的基本原理和应用优势
鸿蒙开发:【OpenHarmony 4.0 Release指导】

鸿蒙OpenHarmony【LED外设控制】 (基于Hi3861开发板)
鸿蒙开发实战:【Hdf Framework】





 工商网监
工商网监
评论