 ROS中的序列化实现
ROS中的序列化实现
理解了序列化,再回到ROS。我们发现,ROS没有采用第三方的序列化工具,而是选择自己实现,代码在roscpp_core项目下的roscpp_serialization中,见下图。这个功能涉及的代码量不是很多。
为什么ROS不使用现成的序列化工具或者库呢?可能ROS诞生的时候(2007年),有些序列化库可能还不存在(protobuf诞生于2008年),更有可能是ROS的创造者认为当时没有合适的工具。
1.2.1 serialization.h
核心的函数都在serialization.h里,简而言之,里面使用了C语言标准库的memcpy函数把消息拷贝到流中。
下面来看一下具体的实现。
序列化功能的特点是要处理很多种数据类型,针对每种具体的类型都要实现相应的序列化函数。
为了尽量减少代码量,ROS使用了模板的概念,所以代码里有一堆的template。
从后往前梳理,先看Stream这个结构体吧。在C++里结构体和类基本没什么区别,结构体里也可以定义函数。
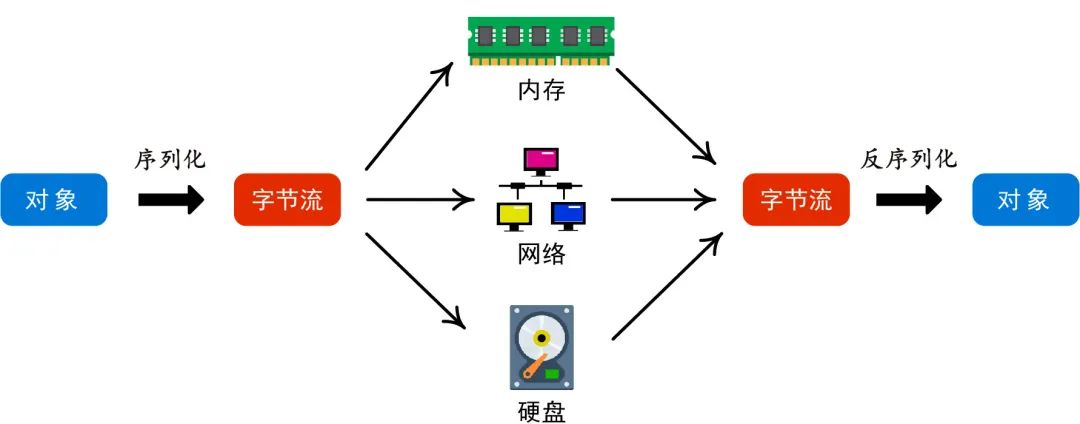
Stream翻译为流,流是一个计算机中的抽象概念,前面我们提到过字节流,它是什么意思呢?
在需要传输数据的时候,我们可以把数据想象成传送带上连续排列的一个个被传送的物体,它们就是一个流。
更形象的,可以想象磁带或者图灵机里连续的纸带。在文件读写、使用串口、网络Socket通信等领域,流经常被使用。例如我们常用的输入输出流:
cout<<"helllo"; 由于使用很多,流的概念也在演变。想了解更多可以看这里。
struct Stream
{
// Returns a pointer to the current position of the stream
inline uint8_t* getData() { return data_; }
// Advances the stream, checking bounds, and returns a pointer to the position before it was advanced.
// throws StreamOverrunException if len would take this stream past the end of its buffer
ROS_FORCE_INLINE uint8_t* advance(uint32_t len)
{
uint8_t* old_data = data_;
data_ += len;
if (data_ > end_)
{
// Throwing directly here causes a significant speed hit due to the extra code generated for the throw statement
throwStreamOverrun();
}
return old_data;
}
// Returns the amount of space left in the stream
inline uint32_t getLength() { return static_cast< uint32_t >(end_ - data_); }
protected:
Stream(uint8_t* _data, uint32_t _count) : data_(_data), end_(_data + _count) {}
private:
uint8_t* data_;
uint8_t* end_;
};
注释表明Stream是个基类,输入输出流IStream和OStream都继承自它。
Stream的成员变量data_是个指针,指向序列化的字节流开始的位置,它的类型是uint8_t。
在Ubuntu系统中,uint8_t的定义是typedef unsigned char uint8_t;
所以uint8_t就是一个字节,可以用size_of()函数检验。data_指向的空间就是保存字节流的。
输出流类OStream用来序列化一个对象,它引用了serialize函数,如下。
struct OStream : public Stream
{
static const StreamType stream_type = stream_types::Output;
OStream(uint8_t* data, uint32_t count) : Stream(data, count) {}
/* Serialize an item to this output stream*/
template< typename T >
ROS_FORCE_INLINE void next(const T& t)
{
serialize(*this, t);
}
template< typename T >
ROS_FORCE_INLINE OStream& operator< < (const T& t)
{
serialize(*this, t);
return *this;
}
};
输入流类IStream用来反序列化一个字节流,它引用了deserialize函数,如下。
struct ROSCPP_SERIALIZATION_DECL IStream : public Stream
{
static const StreamType stream_type = stream_types::Input;
IStream(uint8_t* data, uint32_t count) : Stream(data, count) {}
/* Deserialize an item from this input stream */
template< typename T >
ROS_FORCE_INLINE void next(T& t)
{
deserialize(*this, t);
}
template< typename T >
ROS_FORCE_INLINE IStream& operator >>(T& t)
{
deserialize(*this, t);
return *this;
}
};
自然,serialize函数和deserialize函数就是改变数据形式的地方,它们的定义在比较靠前的地方。它们都接收两个模板,都是内联函数,然后里面没什么东西,只是又调用了Serializer类的成员函数write和read。所以,serialize和deserialize函数就是个二道贩子。
// Serialize an object. Stream here should normally be a ros::serialization::OStream
template< typename T, typename Stream >
inline void serialize(Stream& stream, const T& t)
{
Serializer< T >::write(stream, t);
}
// Deserialize an object. Stream here should normally be a ros::serialization::IStream
template< typename T, typename Stream >
inline void deserialize(Stream& stream, T& t)
{
Serializer< T >::read(stream, t);
}
所以,我们来分析Serializer类,如下。我们发现,write和read函数又调用了类型里的serialize函数和deserialize函数。
头别晕,这里的serialize和deserialize函数跟上面的同名函数不是一回事。
注释中说:“Specializing the Serializer class is the only thing you need to do to get the ROS serialization system to work with a type”(要想让ROS的序列化功能适用于其它的某个类型,你唯一需要做的就是特化这个Serializer类)。
这就涉及到的另一个知识点——模板特化(template specialization)。
template< typename T > struct Serializer
{
// Write an object to the stream. Normally the stream passed in here will be a ros::serialization::OStream
template< typename Stream >
inline static void write(Stream& stream, typename boost::call_traits< T >::param_type t)
{
t.serialize(stream.getData(), 0);
}
// Read an object from the stream. Normally the stream passed in here will be a ros::serialization::IStream
template< typename Stream >
inline static void read(Stream& stream, typename boost::call_traits< T >::reference t)
{
t.deserialize(stream.getData());
}
// Determine the serialized length of an object.
inline static uint32_t serializedLength(typename boost::call_traits< T >::param_type t)
{
return t.serializationLength();
}
};
接着又定义了一个带参数的宏函数ROS_CREATE_SIMPLE_SERIALIZER(Type),然后把这个宏作用到了ROS中的10种基本数据类型,分别是:uint8_t, int8_t, uint16_t, int16_t, uint32_t, int32_t, uint64_t, int64_t, float, double。
说明这10种数据类型的处理方式都是类似的。看到这里大家应该明白了,write和read函数都使用了memcpy函数进行数据的移动。
注意宏定义中的template<>语句,这正是模板特化的标志,关键词template后面跟一对尖括号。
关于模板特化可以看这里。
#define ROS_CREATE_SIMPLE_SERIALIZER(Type)
template< > struct Serializer< Type >
{
template< typename Stream > inline static void write(Stream& stream, const Type v)
{
memcpy(stream.advance(sizeof(v)), &v, sizeof(v) );
}
template< typename Stream > inline static void read(Stream& stream, Type& v)
{
memcpy(&v, stream.advance(sizeof(v)), sizeof(v) );
}
inline static uint32_t serializedLength(const Type&)
{
return sizeof(Type);
}
};
ROS_CREATE_SIMPLE_SERIALIZER(uint8_t)
ROS_CREATE_SIMPLE_SERIALIZER(int8_t)
ROS_CREATE_SIMPLE_SERIALIZER(uint16_t)
ROS_CREATE_SIMPLE_SERIALIZER(int16_t)
ROS_CREATE_SIMPLE_SERIALIZER(uint32_t)
ROS_CREATE_SIMPLE_SERIALIZER(int32_t)
ROS_CREATE_SIMPLE_SERIALIZER(uint64_t)
ROS_CREATE_SIMPLE_SERIALIZER(int64_t)
ROS_CREATE_SIMPLE_SERIALIZER(float)
ROS_CREATE_SIMPLE_SERIALIZER(double)
对于其它类型的数据,例如bool、std::string、std::vector、ros::Time、ros::Duration、boost::array等等,它们各自的处理方式有细微的不同,所以不再用上面的宏函数,而是用模板特化的方式每种单独定义,这也是为什么serialization.h这个文件这么冗长。
对于int、double这种单个元素的数据,直接用上面特化的Serializer类中的memcpy函数实现序列化。
对于vector、array这种多个元素的数据类型怎么办呢?方法是分成几种情况,对于固定长度简单类型的(fixed-size simple types),还是用各自特化的Serializer类中的memcpy函数实现,没啥太大区别。
对于固定但是类型不简单的(fixed-size non-simple types)或者既不固定也不简单的(non-fixed-size, non-simple types)或者固定但是不简单的(fixed-size, non-simple types),用for循环遍历,一个元素一个元素的单独处理。
那怎么判断一个数据是不是固定是不是简单呢?这是在roscpp_traits文件夹中的message_traits.h完成的。
其中采用了萃取Type Traits,这是相对高级一点的编程技巧了,笔者也不太懂。
对序列化的介绍暂时就到这里了,有一些细节还没讲,等笔者看懂了再补。
-
机器人
+关注
关注
211文章
28389浏览量
206942 -
操作系统
+关注
关注
37文章
6808浏览量
123290 -
函数
+关注
关注
3文章
4328浏览量
62575 -
ROS
+关注
关注
1文章
278浏览量
17004
发布评论请先 登录
相关推荐
如何使用Serde进行序列化和反序列化
Java序列化的机制和原理
c语言序列化和反序列化有何区别
SpringMVC JSON框架的自定义序列化与反序列化
java序列化和反序列化范例和JDK类库中的序列化API
C#实现对象序列化的三种方式是什么
python序列化对象
ROS机器人操作系统的实现原理(上)
ROS机器人操作系统的实现原理(下)
什么是序列化 为什么要序列化





 工商网监
工商网监
评论