 【开源获奖案例】智能猫粮控制系统
【开源获奖案例】智能猫粮控制系统

本期为大家推送迪文开发者论坛的获奖开源案例:智能猫粮控制系统。工程师使用迪文智能屏实现了监测猫粮的温度、湿度、余量,保存猫咪吃粮记录等功能,并别出心裁的设计了一套水墨画风格UI,以及手指触摸时的水墨点击效果,增强触摸的视觉反馈。
方案简介
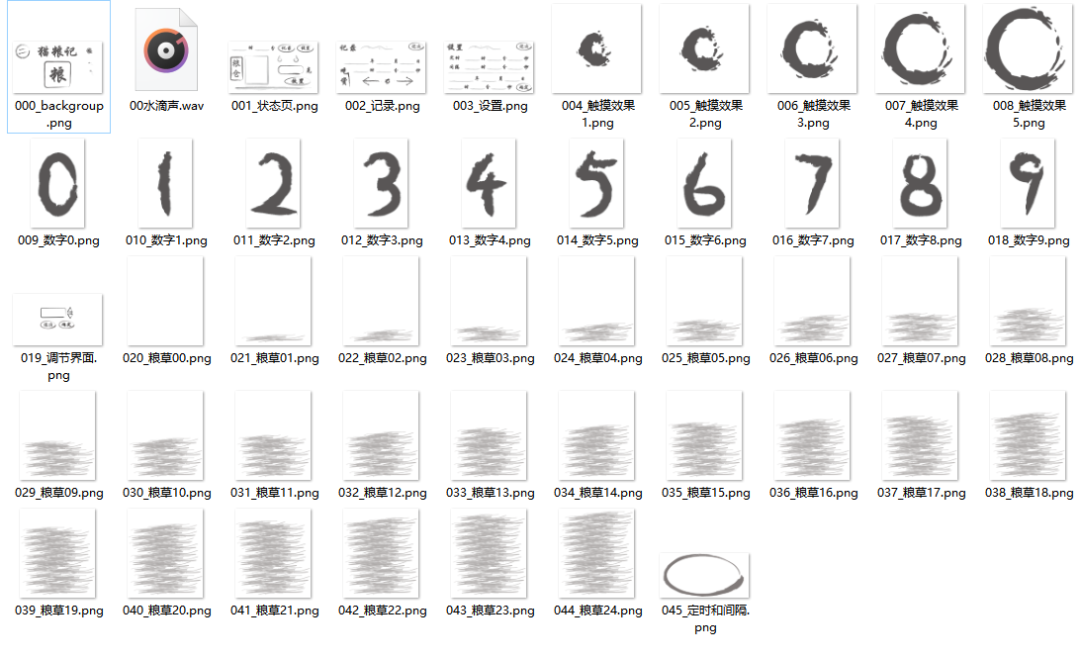
UI图片素材
迪文智能屏是基于图片完成UI开发,需根据屏幕显示内容提前准备好图片、音频等素材。
界面开发
DGUS软件是通过图层叠加来还原UI效果,将准备好的素材在DGUS软件中组合成完整的画面,并设置好显示、触摸功能。
实现点击特效和音效
通过51程序来获取触摸位置,实现按压效果跟随手指移动,同时实现按键伴音音效。
(1)检测触摸位置代码并播放音频:
void TouchDetect()
{
u16 Va[3] = 0;
u8 i = 0;
for(i = 0;i < 3;i++)
{
Va[i] = Read_Dgus(0x0016 + i);
if(Va[0] == 0x5A01)
{
}
else
{
break;
}
}
if(i != 0) //第一次点击进入
{
u16 play[2] = {0x0001, 0x4000};
touchAnimationFlag = 1;
touchAnimationCnt = 0;
touchPosX = Va[1];
touchPosY = Va[2];
write_dgus_vp(0x00A0, play, 2);
}
}
(2)触摸特效显示的代码如下:
void TouchStart()
{
if(touchAnimationFlag == 1)
{
if(touchAnimationCnt == 0)
{
Write_Dgus(0x5011, touchPosX - 100);
Write_Dgus(0x5012, touchPosY - 100);
}
Write_Dgus(0x5000, touchAnimationCnt);
touchAnimationCnt++;
if(touchAnimationCnt == 6)
{
touchAnimationFlag = 0;
Write_Dgus(0x5011, 1024);
Write_Dgus(0x5012, 600);
}
}
}
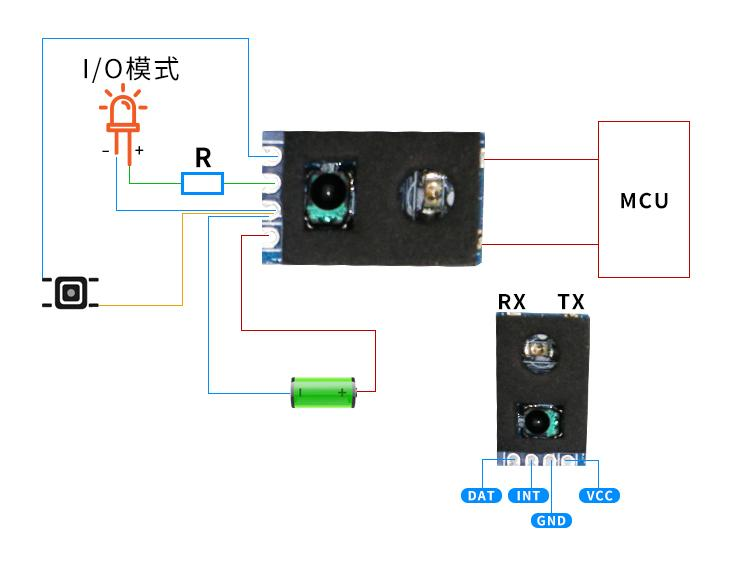
实现猫粮自动出粮
接下来是通过屏幕设定对应的参数,然后数据通过ESP32传输到猫粮控制器,实现猫粮的自动出粮功能,具体代码如下所示:
//获取按键状态
void get_key_status()
{
int i = 0;
//u16 Va=Read_Dgus(addr);
u16 Va=Read_Dgus(0x1000);
if(Va != 0x0000)
{
//状态页
if(Va == 0x0103) //放置g数量
{
u16 switchpage[2] = {0x5A01, 19};
backPage = 1; //返回状态页
Write_Dgus(0x4000 + 0, setNum % 10);
Write_Dgus(0x4000 + 2, setNum / 10 % 10);
Write_Dgus(0x4000 + 4, setNum / 100 % 10);
Write_Dgus(0x4000 + 6, setNum / 1000 % 10);
write_dgus_vp(0x0084, switchpage, 2);
}
else if(Va == 0x0102)
{
OneSendData3(placeGramNum); //放置一次粮
}
else if(Va == 0x0101) //设置页面
{
u16 switchpage[2] = {0x5A01, 3};
for(i = 0;i < 6;i++)
{
if(i == 0)
{
Write_Dgus(0x3070 + i * 0x10 + 0, currentTime[i] % 10);
Write_Dgus(0x3070 + i * 0x10 + 2, currentTime[i] / 10 % 10);
Write_Dgus(0x3070 + i * 0x10 + 4, currentTime[i] / 100 % 10);
Write_Dgus(0x3070 + i * 0x10 + 6, currentTime[i] / 1000 % 10);
}
else
{
Write_Dgus(0x3070 + i * 0x10 + 0, currentTime[i] % 10);
Write_Dgus(0x3070 + i * 0x10 + 2, currentTime[i] / 10 % 10);
}
}
write_dgus_vp(0x0084, switchpage, 2); //进入设置页
}
else if(Va == 0x0100) //记录页面
{
u16 switchpage[2] = {0x5A01, 2};
for(i = 0;i < 6;i++)
{
if(i == 0)
{
Write_Dgus(0x2000 + i * 0x10 + 0, eatFeedList[0][i] % 10);
Write_Dgus(0x2000 + i * 0x10 + 2, eatFeedList[0][i] / 10 % 10);
Write_Dgus(0x2000 + i * 0x10 + 4, eatFeedList[0][i] / 100 % 10);
Write_Dgus(0x2000 + i * 0x10 + 6, eatFeedList[0][i] / 1000 % 10);
}
else
{
Write_Dgus(0x2000 + i * 0x10 + 0, eatFeedList[0][i] % 10);
Write_Dgus(0x2000 + i * 0x10 + 2, eatFeedList[0][i] / 10 % 10);
}
}
write_dgus_vp(0x0084, switchpage, 2); //进入记录页
}
//记录页
else if(Va == 0x0201) //记录页面上一个
{
if(lookEatCnt > 0)
{
lookEatCnt--;
for(i = 0;i < 6;i++)
{
if(i == 0)
{
Write_Dgus(0x2000 + i * 0x10 + 0, eatFeedList[lookEatCnt][i] % 10);
Write_Dgus(0x2000 + i * 0x10 + 2, eatFeedList[lookEatCnt][i] / 10 % 10);
Write_Dgus(0x2000 + i * 0x10 + 4, eatFeedList[lookEatCnt][i] / 100 % 10);
Write_Dgus(0x2000 + i * 0x10 + 6, eatFeedList[lookEatCnt][i] / 1000 % 10);
}
else
{
Write_Dgus(0x2000 + i * 0x10 + 0, eatFeedList[lookEatCnt][i] % 10);
Write_Dgus(0x2000 + i * 0x10 + 2, eatFeedList[lookEatCnt][i] / 10 % 10);
}
}
}
}
else if(Va == 0x0202) //记录页面下一个
{
if(lookEatCnt < eatCnt - 1)
{
lookEatCnt++;
for(i = 0;i < 6;i++)
{
if(i == 0)
{
Write_Dgus(0x2000 + i * 0x10 + 0, eatFeedList[lookEatCnt][i] % 10);
Write_Dgus(0x2000 + i * 0x10 + 2, eatFeedList[lookEatCnt][i] / 10 % 10);
Write_Dgus(0x2000 + i * 0x10 + 4, eatFeedList[lookEatCnt][i] / 100 % 10);
Write_Dgus(0x2000 + i * 0x10 + 6, eatFeedList[lookEatCnt][i] / 1000 % 10);
}
else
{
Write_Dgus(0x2000 + i * 0x10 + 0, eatFeedList[lookEatCnt][i] % 10);
Write_Dgus(0x2000 + i * 0x10 + 2, eatFeedList[lookEatCnt][i] / 10 % 10);
}
}
}
}
//设置页
else if(Va == 0x0302)
{
if(timeMode == 1)
{
timeMode = 0;
Write_Dgus(0x3A12, 139);
}
}
else if(Va == 0x0303)
{
if(timeMode == 0)
{
timeMode = 1;
Write_Dgus(0x3A12, 242);
}
}
else if(Va >= 0x0304 && Va <= 0x0309)
{
u16 switchpage[2] = {0x5A01, 19};
backPage = 3;
backNum = Va;
setNum = timrIntervalHour[Va - 0x0304];
Write_Dgus(0x4000 + 0, setNum % 10);
Write_Dgus(0x4000 + 2, setNum / 10 % 10);
Write_Dgus(0x4000 + 4, setNum / 100 % 10);
Write_Dgus(0x4000 + 6, setNum / 1000 % 10);
write_dgus_vp(0x0084, switchpage, 2);
}
else if(Va >= 0x030A && Va <= 0x030F)
{
u16 switchpage[2] = {0x5A01, 19};
backPage = 3;
backNum = Va;
setNum = currentTime[Va - 0x030A];
Write_Dgus(0x4000 + 0, setNum % 10);
Write_Dgus(0x4000 + 2, setNum / 10 % 10);
Write_Dgus(0x4000 + 4, setNum / 100 % 10);
Write_Dgus(0x4000 + 6, setNum / 1000 % 10);
write_dgus_vp(0x0084, switchpage, 2);
}
//调节数据页
else if(Va == 0x0400) //确定
{
u16 switchpage[2] = {0x5A01, 0x0000};
switchpage[1] = backPage;
if(backPage == 1) //返回状态页
{
placeGramNum = setNum;
Write_Dgus(0x1140 + 0, placeGramNum % 10);
Write_Dgus(0x1140 + 2, placeGramNum / 10 % 10);
}
else if(backPage == 3)
{
if(backNum >= 0x0304 && backNum <= 0x0309)
{
u16 select = 0;
select = (backNum - 0x0304) * 0x10;
timrIntervalHour[backNum - 0x0304] = setNum;
Write_Dgus(0x3010 + select + 0, setNum % 10);
Write_Dgus(0x3010 + select + 2, setNum / 10 % 10);
}
else if(backNum >= 0x030A && backNum <= 0x030F)
{
u16 select = 0;
select = (backNum - 0x0304) * 0x10;
currentTime[backNum - 0x030A] = setNum;
if(backNum == 0x030A)
{
Write_Dgus(0x3010 + select + 0, setNum % 10);
Write_Dgus(0x3010 + select + 2, setNum / 10 % 10);
Write_Dgus(0x3010 + select + 4, setNum / 100 % 10);
Write_Dgus(0x3010 + select + 6, setNum / 1000 % 10);
}
else
{
Write_Dgus(0x3010 + select + 0, setNum % 10);
Write_Dgus(0x3010 + select + 2, setNum / 10 % 10);
}
}
}
write_dgus_vp(0x0084, switchpage, 2);
}
else if(Va == 0x0401) //退出
{
u16 switchpage[2] = {0x5A01, 0x0000};
switchpage[1] = backPage;
write_dgus_vp(0x0084, switchpage, 2);
}
else if(Va == 0x0402) //数值增加
{
setNum++;
Write_Dgus(0x4000 + 0, setNum % 10);
Write_Dgus(0x4000 + 2, setNum / 10 % 10);
Write_Dgus(0x4000 + 4, setNum / 100 % 10);
Write_Dgus(0x4000 + 6, setNum / 1000 % 10);
}
else if(Va == 0x0403) //数值减少
{
if(setNum > 0)
setNum--;
Write_Dgus(0x4000 + 0, setNum % 10);
Write_Dgus(0x4000 + 2, setNum / 10 % 10);
Write_Dgus(0x4000 + 4, setNum / 100 % 10);
Write_Dgus(0x4000 + 6, setNum / 1000 % 10);
}
Write_Dgus(0x1000, 0);
}
}
-
控制系统
+关注
关注
41文章
6998浏览量
114549 -
监测
+关注
关注
2文章
4487浏览量
47624 -
触摸
+关注
关注
8文章
201浏览量
65883 -
开源
+关注
关注
3文章
4416浏览量
46567
发布评论请先 登录

基于芯源CW32 MCU智能家居照明控制系统设计与实现
助力工业物联网升级,智能远程控制系统功不可没
工业控制系统的现状与发展趋势
MT6835磁编芯片:推动电机控制系统进入智能时代
MT6835磁编芯片推动电机控制系统进入智能时代
【开源获奖案例】AI智能交互新方案:基于T5L智能屏的AI DeepSeek大模型

智能温度控制系统解决方案:精准调控,智慧赋能





评论