 基于CW32F030C8T6的舵机控制应用
基于CW32F030C8T6的舵机控制应用
一、舵机原理
如下图所示,本次例程使用的是SG90 9g舵机

SG90舵机应用
SG90舵机目前在高档遥控玩具,如航模、包括飞机模型、潜艇模型、遥控机器人中已经使用得比较普遍。
SG90舵机导线
SG90舵机上有三根线,分别是GND(棕色线)、VCC(红色线)和SIG(黄色线),也就是地线、电源线和信号线。
SG90舵机工作原理
控制信号由接收机的通道进入信号调制芯片,获得直流偏置电压。它内部有一个基准电路,产生周期为20ms,宽度为1.5ms 的基准信号,将获得的直流偏置电压与电位器的电压比较,获得电压差输出。最后,电压差的正负输出到电机驱动芯片决定电机的正反转。当电机转速一定时,通过级联减速齿轮带动电位器旋转,使得电压差为0,电机停止转动。SG90舵机:属于模拟舵机,需要一直发送信号。
SG90舵机舵机的控制
舵机的控制一般需要一个20ms 左右的时基脉冲,该脉冲的高电平部分一般为0.5ms~2.5ms 范围内的角度控制脉冲部分。以180 度角度伺服为例,那么对应的控制关系是这样的:
0.5ms ---------- 0 度;500us
1.0ms ---------- 45 度;
1.5ms ---------- 90 度;
2.0ms ---------- 135 度;
2.5ms ---------- 180 度;
小型舵机的工作电压一般为4.8V 或6V,转速也不是很快,一般为0.22/60 度或0.18/60 度,所以假如你更改角度控制脉冲的宽度太快时,舵机可能反应不过来。如果需要更快速地反应,就需要更高的转速了。
二、PWM输出原理
PWM,英文名Pulse Width Modulation,是脉冲宽度调制缩写,它是通过对一系列脉冲的宽度进行
调制,等效出所需要的波形(包含形状以及幅值),对模拟信号电平进行数字编码。
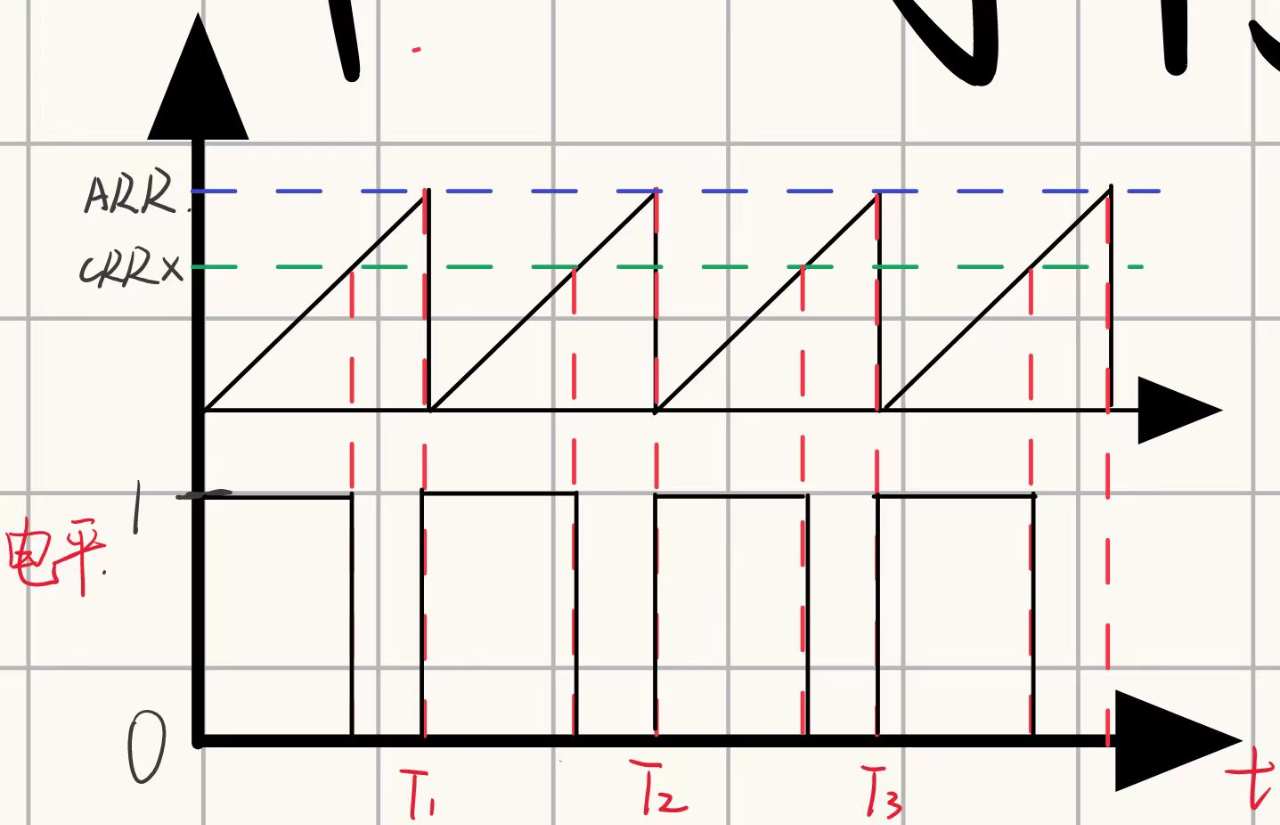
频率ARR、占空比CRRx
频率是指每秒钟信号从高电平到低电平再回到高电平的次数,为一个PWM波周期的倒数。
频率是系统时钟控制,
占空比是指高电平持续时间比一个周期持续的时间。通过控制占空比,来控制输出的等效电压。
所以对于方波的话,频率和占空比就确定了一个波。
三、例程配置
通常,我们在单片机中会使用定时器中断来实现pwm波中高低电平的转换,以及控制一个pwm波周期。
在单片机的io口中,并不是每一个io口都能输出pwm,所以我们要打开数据手册

能看到PB14的功能复用
在本次基于CW32030c8单片机例程中,选择使用高级定时器,并且使用CH2B通道 ,即ATIM_CH2B
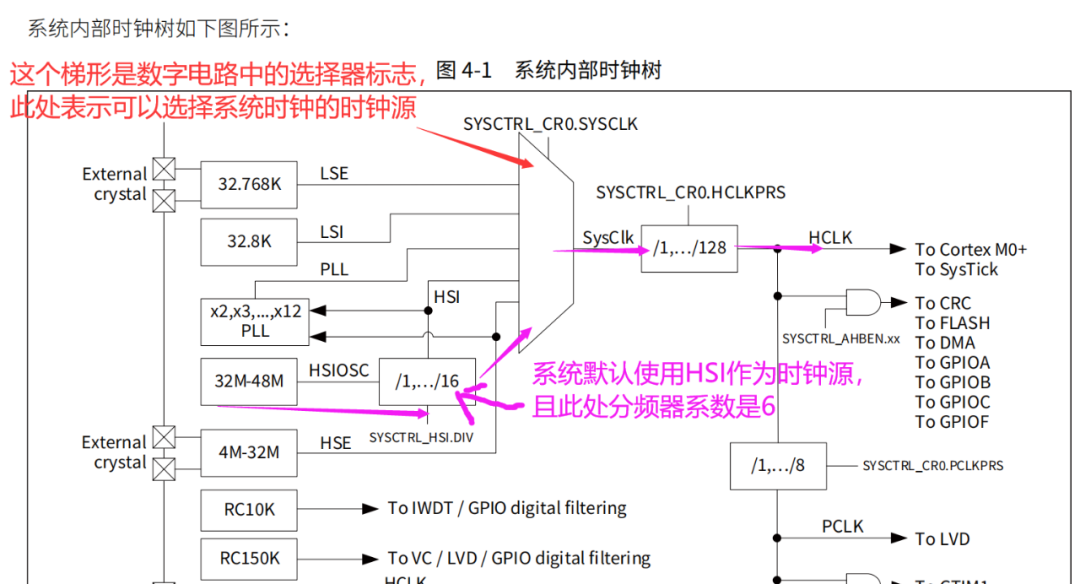
计算周期:用到的PLCK---8MHZ
然后8倍预分频得到1MHZ,因为舵机中的周期为20ms,所以需要得到20ms的周期:
1/1mhz得到机器周期,通过配置高级定时器的重装载值ARR:19999(从0计数),机器周期乘以重装载值,刚好等于20ms,这样我们就设计好了周期,
在函数中设置比较值,也就能控制占空比了。
四、重要代码
voidATIM_IRQHandlerCallBack(void)//高级定时器中断处理回调函数 { staticuint16_tduration=0; staticuint8_tcnt=1; staticuint8_tdir=0; if(ATIM_GetITStatus(ATIM_IT_OVF))//获取ATIM中断标志位即溢出 { ATIM_ClearITPendingBit(ATIM_IT_OVF);//清除ATIM中断标志位即归零 if(cnt++>50)//20msx50=1000ms1秒一次 { cnt=1; if(!dir)//判断状态 { duration+=500;//每次提高占空比2.5%,500/20000 if(duration>=2500)//舵机占空比最高12.5%,即2500 { dir=1;//改变方向 } } ATIM_SetCompare2B(duration);//输出占空比 } } if(ATIM_GetITStatus(ATIM_IT_C2BF))//通道CH2B比较匹配标志中断 { ATIM_ClearITPendingBit(ATIM_IT_C2BF);//清除ATIM中断标志位 } }
来源:CW32生态社区
免责声明:本文为转载文章,转载此文目的在于传递更多信息,版权归原作者所有。本文所用视频、图片、文字如涉及作品版权问题,请联系小编进行处理3
审核编辑 黄宇
-
舵机控制
+关注
关注
3文章
44浏览量
22357 -
CW32
+关注
关注
1文章
183浏览量
575
发布评论请先 登录
相关推荐

基于武汉芯源CW32F030C8T6直流无刷电机评估开发板的介绍
基于CW32F030单片机的模式二便携充电枪应用介绍
STM32F030C8T6微控制器的主要特性介绍
信立诚科技主推低成本高性价比HC32F030J8TA-LQFP48可替换STM32F030C8T6

基于CW32F030C8T6的无刷直流电机驱动系统

基于武汉芯源CW32F030C8T6直流无刷电机评估开发板的介绍
基于CW32F030单片机的模式二便携充电枪应用介绍
武汉芯源半导体基于CW32F030C8T7永磁同步电机无感FOC控制方案全新亮相!
求一种基于CW32的无刷直流空心杯电机无感方波控制驱动方案






 工商网监
工商网监
评论