 使用MM32F0270 定时器DMA方式输出PWM
使用MM32F0270 定时器DMA方式输出PWM
对于控制步进电机来说,最重要的控制参数是脉冲的数量和频率,两者结合可以实现满足要求的电机加减速曲线。在一些电机应用数量不多的场合,通常使用定时器中断发送脉冲来控制步进电机,优点是原理简单代码易于实现。但是一旦控制的电机多起来,就会占用大量的MCU资源,这在大多数情况下是不可接受的,更不用说多轴联动了。那么如何做到占用很少的MCU资源,又能实现脉冲发送的精确控制?
于是就想到了使用DMA功能更新PWM的输出, DMA全称Direct Memory Access,即直接存储器访问。DMA传输将数据从一个地址空间复制到另一个地址空间,提供在外设和存储器之间或者存储器和存储器之间的高速数据传输。它允许不同速度的硬件装置来沟通,而不需要依赖于MPU的大量中断负载。
通过设置DMA传输数据的数量,可以控制发送的脉冲数。通过设置不同的装载值和顺序,可以使用不同频率和脉宽。当需要发送较多数量的脉冲时,则可以使用DMA传输完成中断中切换DMA传输的数据起始地址及发送数量,继续发送。这个方法即方便,又减轻MPU的负担,可以同时驱动多个电机工作,还可以根据电机的启动、运行、停止使用不同的频率。
定时器DMA模式
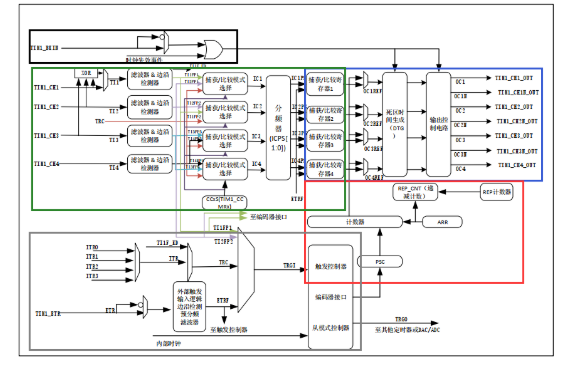
MM32F0270的定时器TIM1、TIM2、TIM3、TIM15、TIM16/17有DMA模式,能够在发生单个事件时生成多个DMA 请求。主要目的是在没有软件开销的情况下,多次重新编程定时器的一部分,也可以用于按周期读取数个寄存器。下面以TIM1为例介绍:
TIM1_DCR 和 TIM1_DMAR 寄存器跟 DMA 模式相关。DMA 控制器的目标是唯一的,必须指向TIM1_DMAR 寄存器。开启 DMA 使能后,在给定的 TIM1 事件发生时, TIM1 会给 DMA 发送请求。
对 TIM1_DMAR 寄存器的每次写操作都被重定向到一个 TIM1 寄存器。TIM1_DCR寄存器的DBL位定义了DMA连续传送的长度,即传输寄存器数量;当对TIM1_DMAR进行读写操作时,定时器识别 DBL,确定传输的寄存器数量。TIM1_DCR 寄存器的 DBA 位定义了DMA 传输的基地址, 定义从 TIM1_CR1 寄存器地址开始的偏移量(00000 为 TIM1_CR1;00001 为TIM1_CR2;……; 00110 为 TIM1_CCMR1 等)。
通过定时器的DMA模式来更新PWM,本文参官网例程“TIM1_DMA_UPData”进行说明具体实现方法。
实验
本实验使用TIM1的DMA模式,当更新事件发生时,更新 TIM1_CCR1、TIM1_CCR2 和 TIM1_CCR3 寄存器的内容。程序中配置TIM1的通道1、通道2、通道3输出PWM,再通过DMA搬运数据来改变PWM的占空比。定时器每产生一个溢出事件(即计数完成),就发送DMA请求,根据数据在数组中的排列顺序以生成所需要的时序。
程序部分
GPIO初始化
配置TIM1_CH1、TIM1_CH2 和 TIM1_CH3对应的GPIO。
void TIM1_GPIO_Init(void)
{
GPIO_InitTypeDef GPIO_InitStruct;
RCC_AHBPeriphClockCmd(RCC_AHBENR_GPIOA, ENABLE);
GPIO_PinAFConfig(GPIOA, GPIO_PinSource8, GPIO_AF_2);
GPIO_PinAFConfig(GPIOA, GPIO_PinSource9, GPIO_AF_2);
GPIO_PinAFConfig(GPIOA, GPIO_PinSource10, GPIO_AF_2);
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_8 | GPIO_Pin_9 | GPIO_Pin_10;
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, GPIO_InitStruct);
}
TIM1 DMA初始化
TIM1_CH3对应DMA1通道5,将data[]中的数据传送到TIM1_DMAR寄存器,传输方向从存储器到外设,数据宽度为半字,使能DMA传输完成中断。
void TIM_DMA_Init(void)
{
DMA_InitTypeDef DMA_InitStruct;
RCC_AHBPeriphClockCmd(RCC_AHBENR_DMA1, ENABLE);
DMA_DeInit(DMA1_Channel5);
DMA_StructInit( DMA_InitStruct);
//Transfer register address
DMA_InitStruct.DMA_PeripheralBaseAddr = (u32) (TIM1->DMAR);
//Transfer memory address
DMA_InitStruct.DMA_MemoryBaseAddr = (u32)data;
//Transfer direction, from memory to register
DMA_InitStruct.DMA_DIR = DMA_DIR_PeripheralDST;
DMA_InitStruct.DMA_BufferSize = 6;
DMA_InitStruct.DMA_PeripheralInc = DMA_PeripheralInc_Disable;
//Transfer completed memory address increment
DMA_InitStruct.DMA_MemoryInc = DMA_MemoryInc_Enable;
DMA_InitStruct.DMA_PeripheralDataSize = DMA_PeripheralDataSize_HalfWord;
DMA_InitStruct.DMA_MemoryDataSize = DMA_MemoryDataSize_HalfWord;
DMA_InitStruct.DMA_Mode = DMA_Mode_Circular;
DMA_InitStruct.DMA_Priority = DMA_Priority_High;
DMA_InitStruct.DMA_M2M = DMA_M2M_Disable;
DMA_InitStruct.DMA_Auto_reload = DMA_Auto_Reload_Disable;
DMA_Init(DMA1_Channel5, DMA_InitStruct);
DMA_ITConfig(DMA1_Channel5, DMA_IT_TC, ENABLE);
}
TIM1 PWM初始化
TIM1输出PWM,配置时钟分频系数和预装载值,递增计数,使用PWM模式1,输出高电平有效,分别对TIM1_CH1、TIM1_CH2、TIM1_CH3指定要加载到捕获比较寄存器中的脉冲值为arr/2、arr/4、arr/6,使能TIM1的DMA模式,起始地址为TIM1_CCR1,传输长度为3。
void TIM1_PWM_Init(u16 arr, u16 psc)
{
TIM_TimeBaseInitTypeDef TIM_TimeBaseStruct;
TIM_OCInitTypeDef TIM_OCInitStruct;
RCC_APB2PeriphClockCmd(RCC_APB2ENR_TIM1, ENABLE);
TIM_TimeBaseStructInit( TIM_TimeBaseStruct);
TIM_TimeBaseStruct.TIM_Period = arr;
TIM_TimeBaseStruct.TIM_Prescaler = psc;
//Setting Clock Segmentation
TIM_TimeBaseStruct.TIM_ClockDivision = TIM_CKD_DIV1;
TIM_TimeBaseStruct.TIM_RepetitionCounter = 0;
///TIM Upward Counting Mode
TIM_TimeBaseStruct.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseInit(TIM1, TIM_TimeBaseStruct);
TIM_OCStructInit( TIM_OCInitStruct);
//Select Timer Mode: TIM Pulse Width Modulation Mode 2
TIM_OCInitStruct.TIM_OCMode = TIM_OCMode_PWM1;
TIM_OCInitStruct.TIM_OutputState = TIM_OutputState_Enable;
TIM_OCInitStruct.TIM_OCPolarity = TIM_OCPolarity_High;
//Setting the Pulse Value of the Capture Comparison Register to be Loaded
TIM_OCInitStruct.TIM_Pulse = arr / 2;
TIM_OC1Init(TIM1, TIM_OCInitStruct);
TIM_OC3PreloadConfig(TIM1, TIM_OCPreload_Enable);
TIM_OCInitStruct.TIM_Pulse = arr / 4;
TIM_OC2Init(TIM1, TIM_OCInitStruct);
TIM_OC2PreloadConfig(TIM1, TIM_OCPreload_Enable);
TIM_OCInitStruct.TIM_Pulse = arr / 6;
TIM_OC3Init(TIM1, TIM_OCInitStruct);
TIM_OC3PreloadConfig(TIM1, TIM_OCPreload_Enable);
TIM_ARRPreloadConfig(TIM1, ENABLE);
TIM_DMAConfig(TIM1, TIM_DMABase_CCR1, TIM_DMABurstLength_3Bytes);
TIM_DMACmd(TIM1, TIM_DMA_Update, ENABLE);
TIM_CtrlPWMOutputs(TIM1, ENABLE);
TIM_Cmd(TIM1, ENABLE);
}
使能DMA1通道5
DMA_Cmd(DMA1_Channel5, ENABLE);
配置NVIC
NVIC_Configure(DMA1_Channel4_5_6_7_IRQn, 1, 1);
DMA1中断服务子程序
void DMA1_Channel4_5_6_7_IRQHandler()
{
if (DMA_GetITStatus(DMA1_IT_TC5)) {
//clear IRQ flag
DMA_ClearITPendingBit(DMA1_IT_TC5);
}
}
定义数组data[]
static u16 data[] = {2000, 3000, 4000, 8000, 7000, 6000};
Main()函数
s32 main(void)
{
TIM1_GPIO_Init();
TIM1_PWM_Init(10000, 0);
TIM_DMA_Init();
NVIC_Configure(DMA1_Channel4_5_6_7_IRQn, 1, 1);
DMA_Cmd(DMA1_Channel5, ENABLE);
while (1) {
}
}
演示
下载程序到目标板。连接逻辑分析仪测试PA8、PA9、PA10的输出,打开对应上位机软件启动采样,运行程序,各通道的PWM输出情况如下:

截取其中1个周期观察:

TIM1_CH1输出PWM占空比为20%和80%, TIM1_CH1输出PWM占空比为30%和70%, TIM1_CH1输出PWM占空比为40%和60%,运行结果和预期一致。
实验简单演示了MM32F0270的定时器TIM1的DMA方式更新PWM,通过该方案可以实现多路、不同频率、不同脉宽、数量精确可控的PWM波。
工程路径如下:
~ MM32FMM32F0270_Lib_SamplesMM32F0270_SamplesLibSamplesTIMTIM1_DMA_UPData。
来源:灵动MM32MCU
免责声明:本文为转载文章,转载此文目的在于传递更多信息,版权归原作者所有。本文所用视频、图片、文字如涉及作品版权问题,请联系小编进行处理
审核编辑 黄宇
-
PWM
+关注
关注
114文章
5193浏览量
214316 -
定时器
+关注
关注
23文章
3253浏览量
115057 -
dma
+关注
关注
3文章
565浏览量
100724
发布评论请先 登录
相关推荐
灵动微课堂 (第196讲) | 使用MM32F0270 LPTIM从STOP模式唤醒
灵动微课堂 (第197讲) | MM32F0270 UART空闲中断 + DMA接收不定长数据
灵动微课堂 (第198讲) | 使用MM32F0270 LPUART从低功耗模式唤醒
灵动微课堂 (第200讲) | 使用MM32F0270 定时器DMA方式输出PWM
灵动微课堂 (第200讲) | 使用MM32F0270 定时器DMA方式输出PWM
MM32F0140定时器模块计数定时功能






 工商网监
工商网监
评论