 航顺HK32MCU在长虹卫博士智能扫吸机器人上的应用
航顺HK32MCU在长虹卫博士智能扫吸机器人上的应用
扫地机器人,又称自动打扫机、智能吸尘、机器人吸尘器等,是智能家居电器的一种,能凭借一定的人工智能,自动在房间内完成地板清理工作。一般采用刷扫和真空方式,将地面杂物先吸纳进入自身的垃圾收纳盒,从而完成地面清理的功能。一般来说,将完成清扫、吸尘、擦地工作的机器人,也统一归为扫地机器人。
扫地机器的机身为无线机器,以圆盘型为主。使用充电电池运作,操作是使用遥控器、或是机器上的操作面板。一般能设定时间预约打扫,自行充电。机器前方有设置器,可侦测障碍物,如碰到墙壁或其他障碍物,会自行转弯,不同厂商可根据设置来设定不同的路线、规扫地区。(部分较早期机型可能缺少部分功能) 因为其功能及简单操作的便利性,现今已慢慢普及,成为上班族或是现代家庭的常用家电用品。
卫博士(VBOT)是长虹格兰博智能科技有限公司为现代家庭打造的智能家庭扫地机器人品牌,VBOT G270采用航顺32位主控MCU HK32F030K6T6,负责电机控制、路线算法、遥控接收、电池管理等功能。
VBOT G270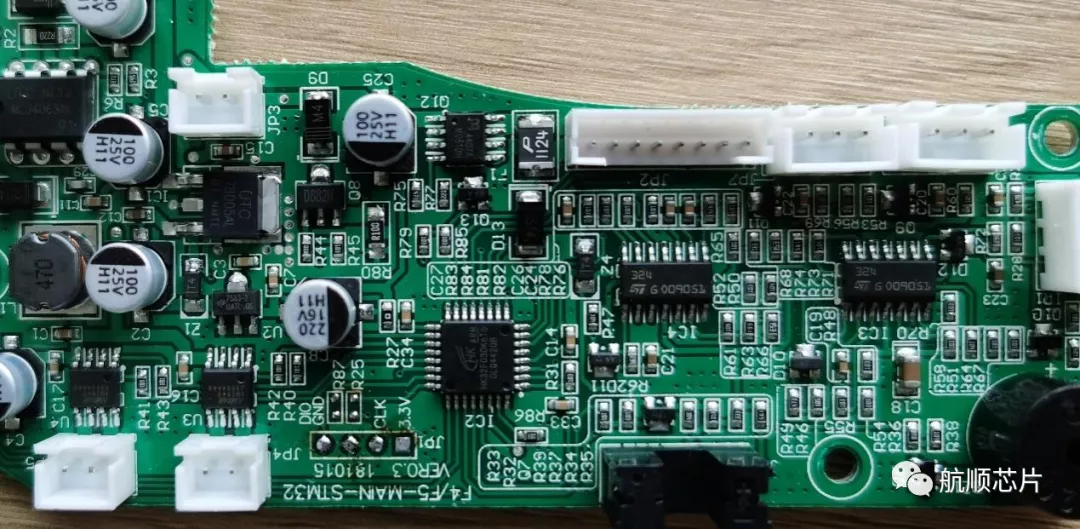 VBOT G270 主板
VBOT G270 主板
卫博士(VBOT)特点
●采用双边刷设计,增大了机器人在清扫路线上的清扫范围,会沿壁行走,能清除室内死角区域。
●比较薄的机身可以直接切入家居底部进行清扫,来去自如,有五种行走模式交错进行。
●采用红外线进行遥控指令传输,在机器人的尾部有个红外感应装置。
●机器人的无线充电座上面也有个红外发射装置,可以发出信号好让机器人自动返回充电座进行充电。
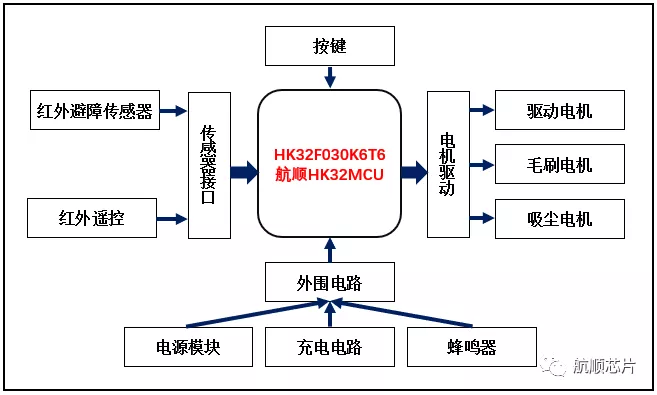
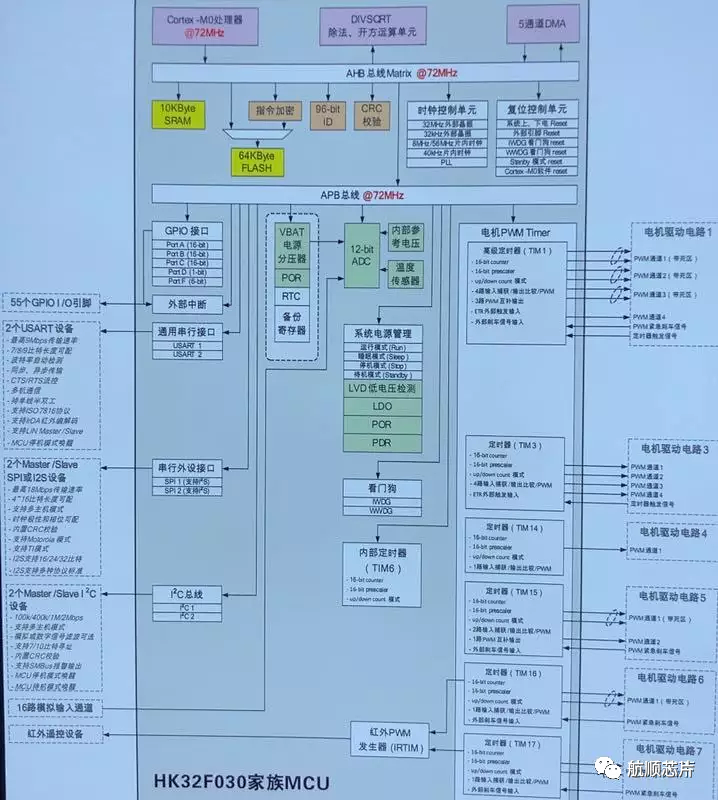
扫地机器人系统框图
HK32F030K6T6产品特点
——CPU
●ARM Cortex-M0内核
●最高时钟频率:72MHz
●支持CPU Event信号输入至MCU引脚,实现与板级其它SOC CPU的联动
——工作电压范围
●单电源域:主电源VDD为2.0 V ~ 5.5V
——工作温度范围:-40℃ ~ +105℃
——VDD典型工作电流
●运行(Run)模式:13.23 mA/72MHz@3.3V
●睡眠(Sleep)模式:5.44 mA@3.3V
●停机(Stop)模式:LDO低功耗10 μA@3.3V
——存储器
●最高64 Kbyte的Flash存储器
●CPU主频不高于 24 MHz时,支持零等待总线周期
●具有代码安全保护功能,可分别设置读保护和写保护
●支持存储于Flash的指令和数据加密,以防止Flash内容被物理攻击
●10 Kbyte SRAM(不支持硬件校验功能)
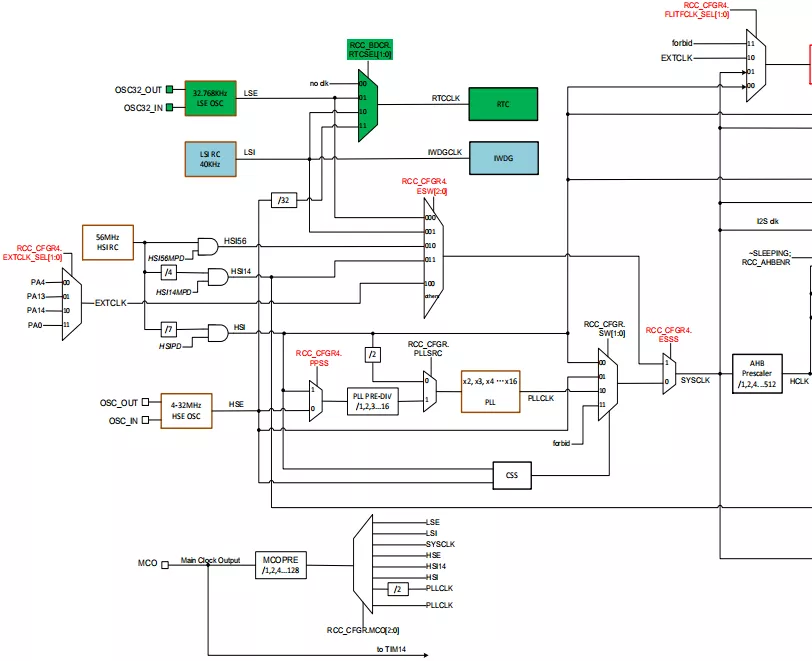
——时钟
●外部HSE:4~16 MHz,典型频率为 8 MHz
●外部LSE:32.768 kHz
●片内HSI:8/14/56 MHz
●片内LSI:40 kHz
●PLL时钟
●芯片管脚输入时钟
——DMA
●5个通道的DMA控制器
●支持Timer、ADC、SPI、I2C、USART等多种外设触发
——安全加密: CRC计算单元
——数据通信接口
●2个USART:支持主同步SPI和调制解调器控制,具有ISO7816接口、LIN、IrDA能力、自动波特率检测和唤醒特性
●2个高速SPI:支持4至16个可编程比特帧和复用的 I2S 接口
●2个I2C:支持极速模式(1 Mbit/s)、SMBus和PMBus,可从停机模式唤醒
——定时器
●1个高级控制定时器(TIM1)
●5个通用定时器(TIM3/TIM14/TIM15/TIM16/TIM17)
●1个基本定时器(TIM6)
——日历
●RTC,具有闹钟功能,可从停机/待机模式周期唤醒
——片内模拟电路
●1个12位的ADC:16个外部模拟信号输入通道,支持最高 1 MSPS采样频率的自动连续转换和扫描转换
——定点数除法/开方运算单元
●支持32位定点数除法,可同时获得商和余数
●支持32位定点数高精度开方
——可靠性
●通过HBM2000V/CDM500V/MM200V/LU等级测试
来源:航顺芯片
审核编辑:汤梓红
-
mcu
+关注
关注
146文章
17458浏览量
354456 -
机器人
+关注
关注
212文章
28910浏览量
209654 -
HK32MCU
+关注
关注
0文章
29浏览量
233
发布评论请先 登录
相关推荐
航顺HK32系列MCU在无线传感网节点上的应用
IAR Embedded Workbench®集成开发环境已全面支持航顺芯片HK32MCU系列
前文晔/ST产品线华南市场总监加盟航顺HK32MCU
航顺HK32MCU 2022新品发布会暨航顺芯片大厦乔迁仪式圆满完成

HK32MCU应用笔记(八)| 航顺HK32F03X内部8M时钟倍频成72M解决方案
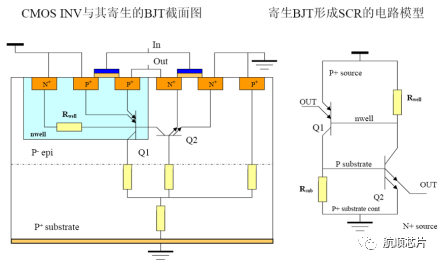
HK32MCU应用笔记(七)| 航顺HK32MCU闩锁效应问题研究及预防措施

HK32MCU应用笔记(二)| 国外品牌采用航顺HK32F030R8T6代替出现串口不兼容解决方法
航顺芯片亮相CICD年会主论坛,HK32MCU助力中国智造产业升级

航顺芯片HK32MCU携新品闪耀慕尼黑上海电子展,开启电子盛宴

航顺HK32MCU在电机行业应用与布局

航顺HK32MCU闪耀2024’第七届电动工具控制与充电技术研讨会





 工商网监
工商网监
评论