 使用ROS与Movelt实现myCobot 280运动轨迹规划和控制
使用ROS与Movelt实现myCobot 280运动轨迹规划和控制
ROS的技术案例
Introduction
今天这篇文章将记录我使用myCobot 280 M5stack 在ROS当中是如何使用的。为什么使用ROS呢,因为提及到机器人都离不开ROS这个操作系统,今天是我们第一次使用ROS这个系统。
今天我将从ROS的介绍,环境的配置以及mycobot280 在ROS当中的使用。
ROS
ROS(Robot Operating System,机器人操作系统)是一个用于编写机器人软件的灵活的框架。它是一个半开源的项目,为研究人员和开发者提供了一套工具和库,以帮助他们创建各种机器人应用。ROS主要用于研究和开发各种机器人系统,如自动驾驶车辆、服务机器人、工业机器人、无人机等。它使得机器人的开发更加高效,也使得机器人的功能更加强大和灵活。ROS操作系统目前最受关注的两个模块是导航(navigation)和机械臂控制(moveit)其中moveit可以让用户快速建立机械臂模型并实现机械臂的控制,例如建模,运动学求解,运动规划,避障等功能。介于有这么一个强大的系统,我想用它来仿真实现一些机械臂的避障,路径规划等功能。
环境配置
ROS主要支持Ubuntu(Linux),Mac OS(缺少部分的支持)这些操作系统,最常见的还是在ubuntu系统上使用。我电脑安装的是ubuntu18.04版本,Ubuntu18对应的ROS版本是melodic,不同版本的ubuntu对应不同ROS版本。
ubuntu16.04-kinetic
ubuntu18.04-melodic
ubuntu20.04-noetic
由于我电脑已经安装好了系统以及ROS环境,这边就不一一记录了,主要还是记录ROS当中的操作。 关于ubuntu系统的安装和ROS环境的搭建大家可以在Google当中搜索,ROS官网也有详细的安装教程。
ROS: Getting Started
我今天使用的场景是moveit控制机械臂,所以对于电脑硬件的需求不高,这边注意如果是使用SLAM雷达导航等功能,可能就需要高配一些的电脑来处理运算能力。
检测自己是否安装完成ROS的标准,打开终端输入“roscore”,出现跟下图一样的内容代表安装成功了。
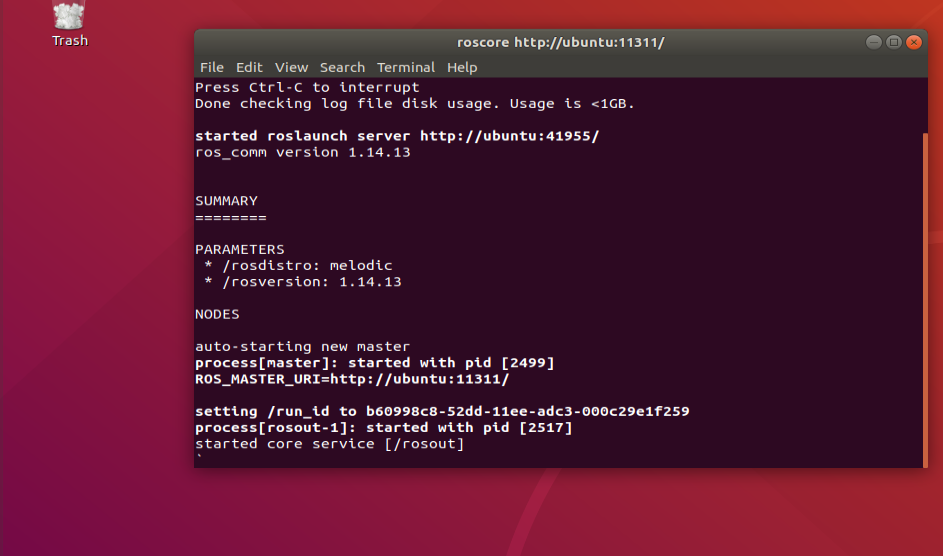
让我们开始使用ROS吧。
ROS的使用
在ROS当中创建一个机械臂,并且使用一些路径规划的功能需要执行以下步骤。
创建URDF的文件,也就是机械臂的模型
将URDF文件加载到ROS服务器当中
使用RViz进行可视化
创建MoveIt配置包
使用MoveIt进行运动规划
创建URDF文件
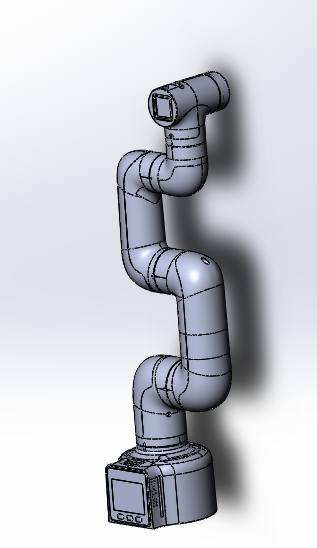
首先咱得创建机械臂的URDF(Unified Robot Description Format)文件,这个文件至关重要,因为机械臂的3D模型,这个文件描述了机械臂的属性,如关节,链接和传感器。由于该产品是大象机器人的一款机械臂myCobot 280 M5Stack,大象机器人在Github有提供myCobot 280的URDF文件描述了机械臂的一些物理属性。
https://github.com/elephantrobotics/mycobot_ros/tree/noetic/mycobot_description/urdf
如何生成urdf文件:
需要使用CAD软件制作模型,确保制作的3D模型跟实际的机械臂尺寸一致。因为导出的模型要是一个可以被ROS接受的格式,通常是DAE(collada)文件。
将URDF加载到ROS服务器
创建ROS包
创建一个存放URDF文件的包,在终端执行下面的代码
catkin_create_pkg mycobot_description rospy std_msgs sensor_msgs
其中‘rospy’,‘std_msgs'和’sensor_msgs'是ROS的依赖包
将生成的urdf文件添加到mycobot_description/urdf的目录下
创建启动文件
在mycobot_description/launch目录下创建一个load_urdf.launch文件,在其中添加以下内容
启动ROS文件qi
我们在打开终端输入下面的命令。
roslaunch my_robot_description load_urdf.launch
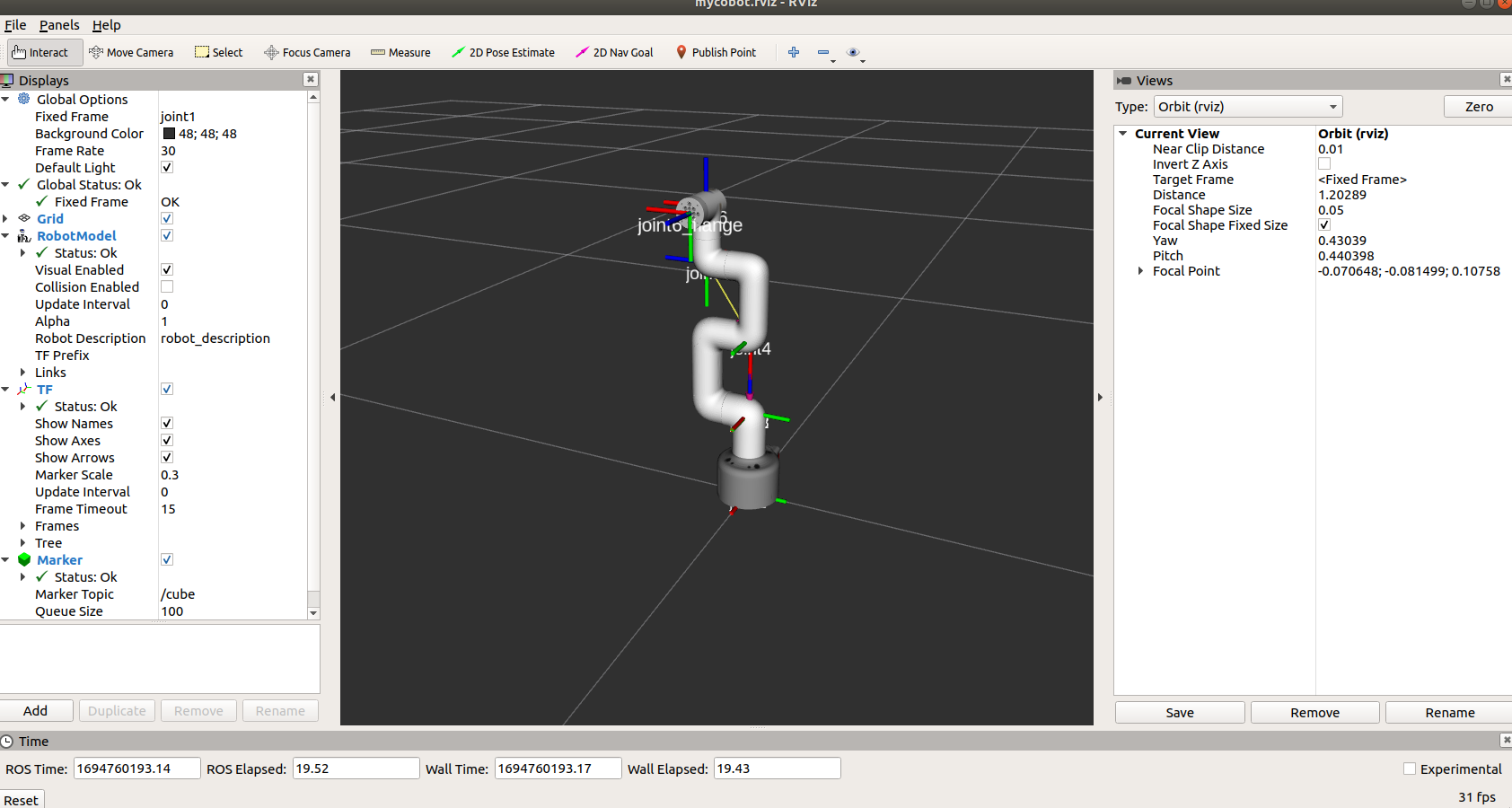
运行完之后,就可以在RViz当中看到我们创建的模型了。
配置MoveIt
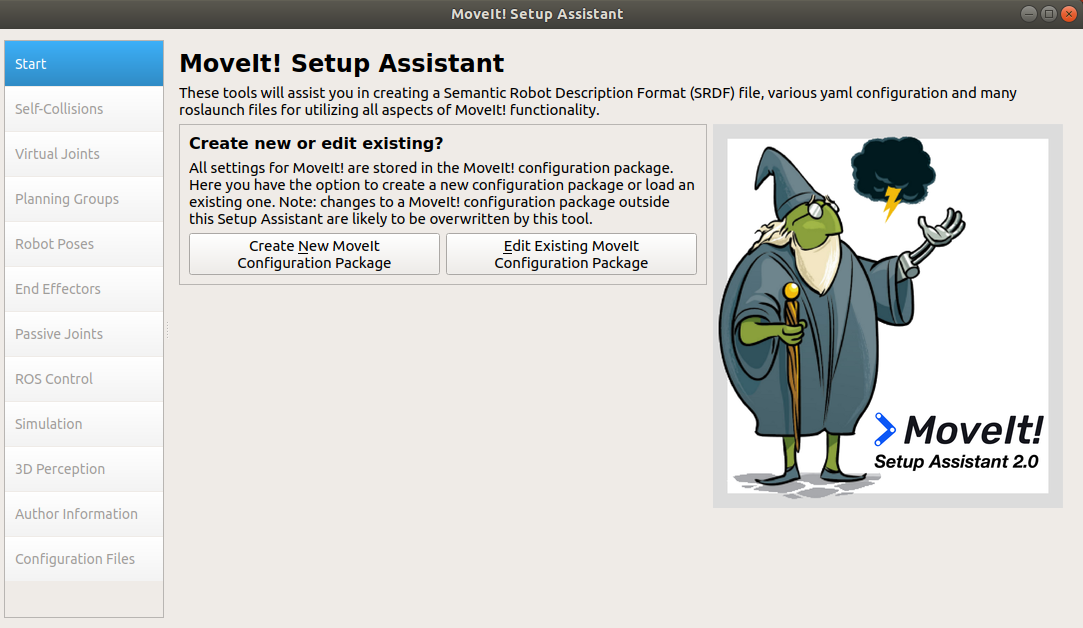
启动MoveIt Setup Assistant:
在终端中,运行以下命令来启动MoveIt Setup Assistant:
roslaunch moveit_setup_assistant setup_assistant.launch
在MoveIT当中加载URDF
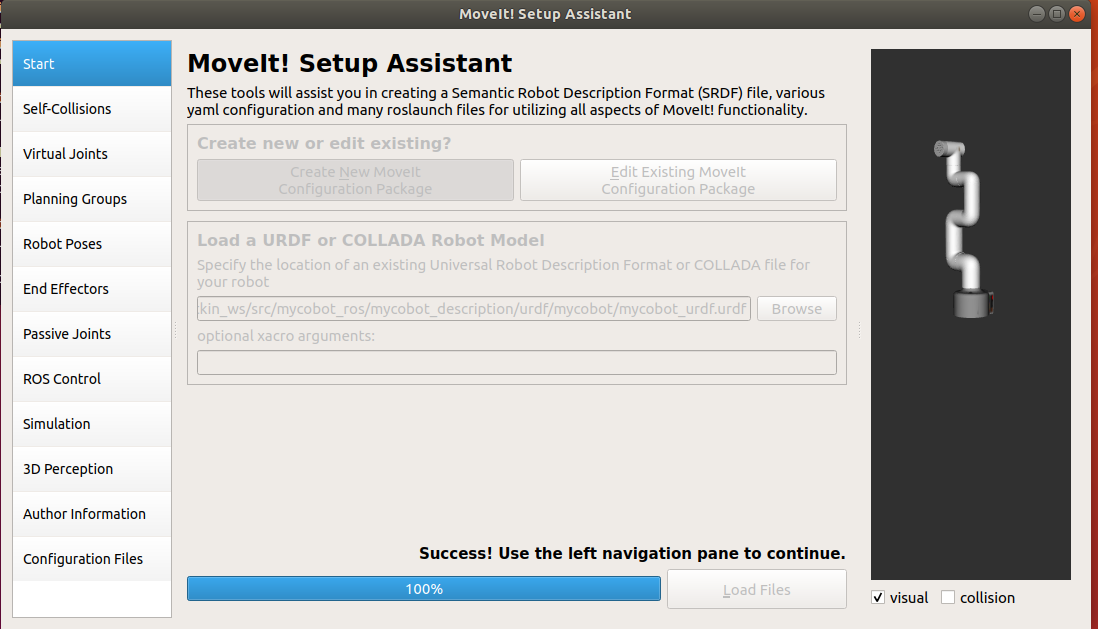
在MoveIt Setup Assistant的主界面,点击“Create New MoveIt Configuration Package”按钮。然后,在弹出的对话框中,选择我的URDF文件(在ROS参数robot_description中)。点击“Load Files”按钮来加载你的URDF文件。显示下图就加载成功了。
配置我的机器人
根据自己的需求来配置自己的机器人。这里简要介绍几个配置:
Self-Collisions:MoveIt会自动计算你的机器人的自碰撞矩阵。可以点击“Regenerate Default Collision Matrix”按钮来生成默认的自碰撞矩阵。
Virtual Joints:可以为你的机器人定义虚拟关节。虚拟关节通常用于连接你的机器人和世界。
Planning Groups:可以定义你的机器人的规划组。规划组是一组需要一起移动的关节和链。例如,你可以创建一个包含所有手臂关节的规划组。
Robot Poses:可以定义你的机器人的预设姿态。预设姿态可以在规划中被重复使用。
运行moveit
配置完成之后会生成.launch的文件,我们运行它就可以在moveit中使用机械臂了。
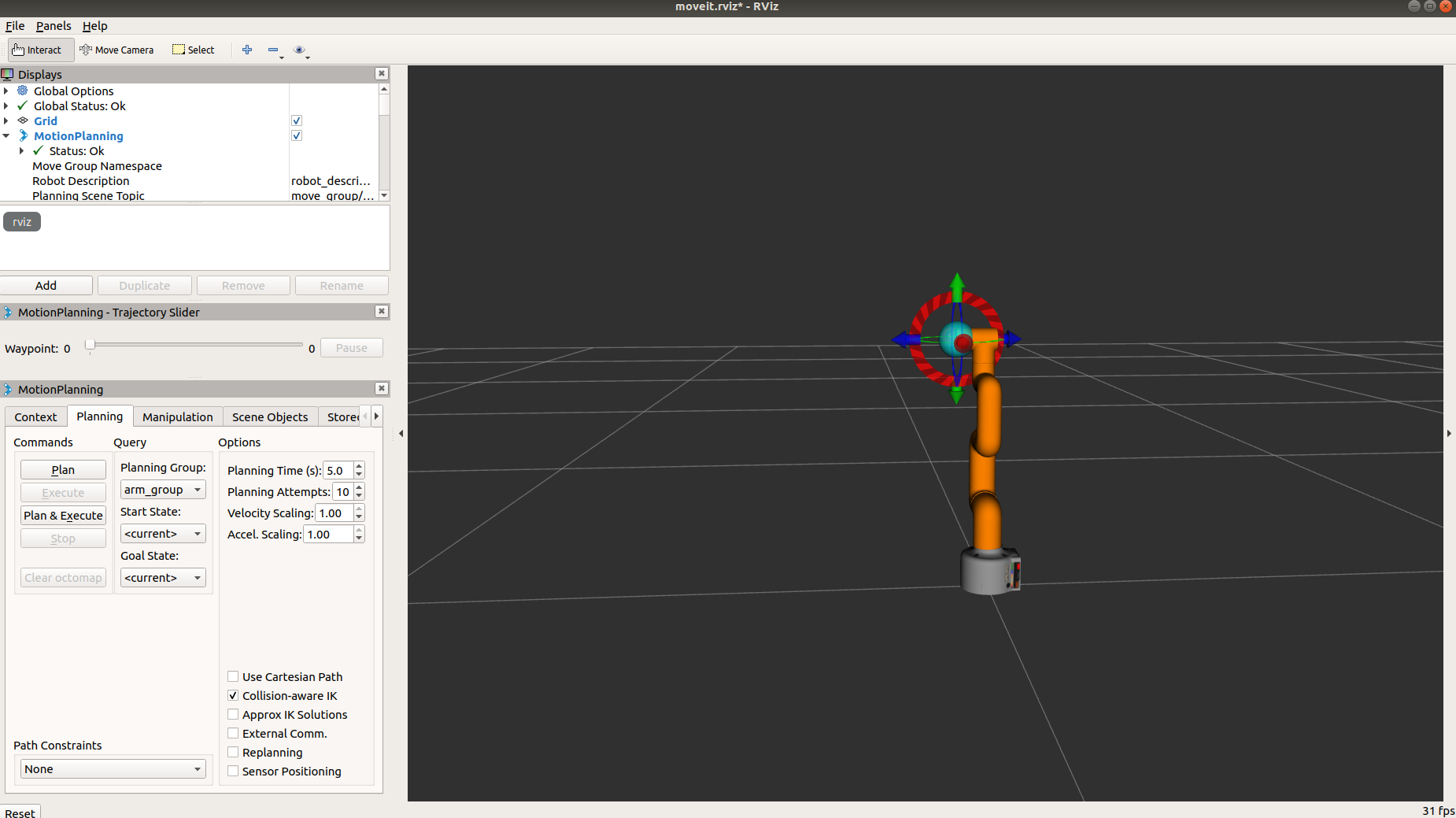
我们来看看moveit的功能如何进行路径规划,拖动机械臂末端的坐标,可以对机械臂进行运动的变化,也可以随机生成路径。
物体避障
我们在moveit中添加一个障碍物让机械臂进行避障,添加一个方块,让机械臂在做轨迹的时候绕过它。
除此之外moveit还有许多功能例如,运动规划,可以为多关节的机器人进行路径规划,避免碰撞,并且还可以是用多种运动规划算法RRT,EST,LBKPIECE等;碰撞检测,可以进行复杂的3D碰撞检测,包括子碰撞和环境碰撞(障碍物);仿真,可以于gazebo机器人仿真器继承,进行真实的物理仿真等等功能。
总结
MoveIt提供了一套完整的工具集,可以用于机械臂的运动规划和控制的研究,无需从头开始构建复杂的运动规划系统。这可以使得开发人员将更多的经理集中在实现具体的应用功能上,而不是解决底层的运动规划和控制问题上。总的来说,ROS和MoveIt为机器人技术的发展提供了强大的支持。它们不仅降低了开发难度,提高了开发效率,而且还推动了机器人技术的创新和应用。无论你是机器人技术的研究者,还是实际应用的开发者,ROS和MoveIt都将是你不可或缺的工具。
我在未来也会继续探索更多的机械臂项目,并不定期分享我的发现和成果。如果你发现本文中有一些错误欢迎跟我进行沟通,如果你喜欢这篇文章留下你的点赞和评论是对我最大的支持!
审核编辑 黄宇
-
机器人
+关注
关注
211文章
28390浏览量
206957 -
机械臂
+关注
关注
12文章
513浏览量
24558 -
ROS
+关注
关注
1文章
278浏览量
17004
发布评论请先 登录
相关推荐

ROS让机器人开发更便捷,基于RK3568J+Debian系统发布!
电磁轨迹预测分析系统
运动控制与自动化PLC过程控制的区别
运动控制系统的组成与作用
基于VPLC711的曲面外观检测XYR运动控制解决方案
机器视觉运动控制一体机在喇叭跟随点胶上的应用
利用6轴姿态模块来计算,物体的运动轨迹能不能实现?
EtherCAT运动控制器在ROS上的应用开发案例(下)

EtherCAT运动控制器在ROS上的应用开发案例(上)

EtherCAT运动控制器在ROS上的应用(上)






 工商网监
工商网监
评论