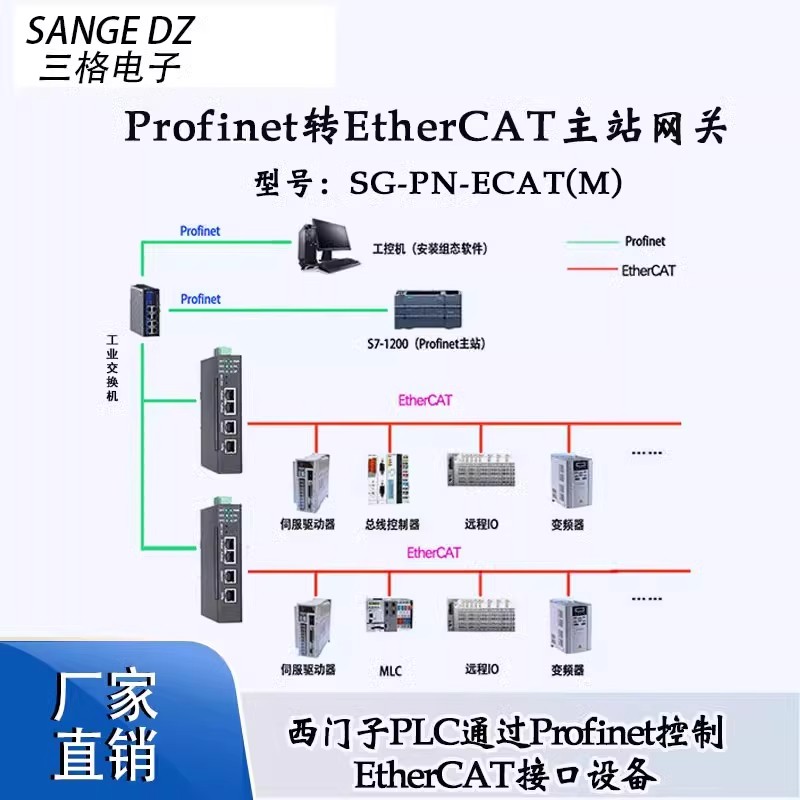
 Profinet转EtherCAT主站网关用西门子1200控制EtherCAT伺服。
Profinet转EtherCAT主站网关用西门子1200控制EtherCAT伺服。

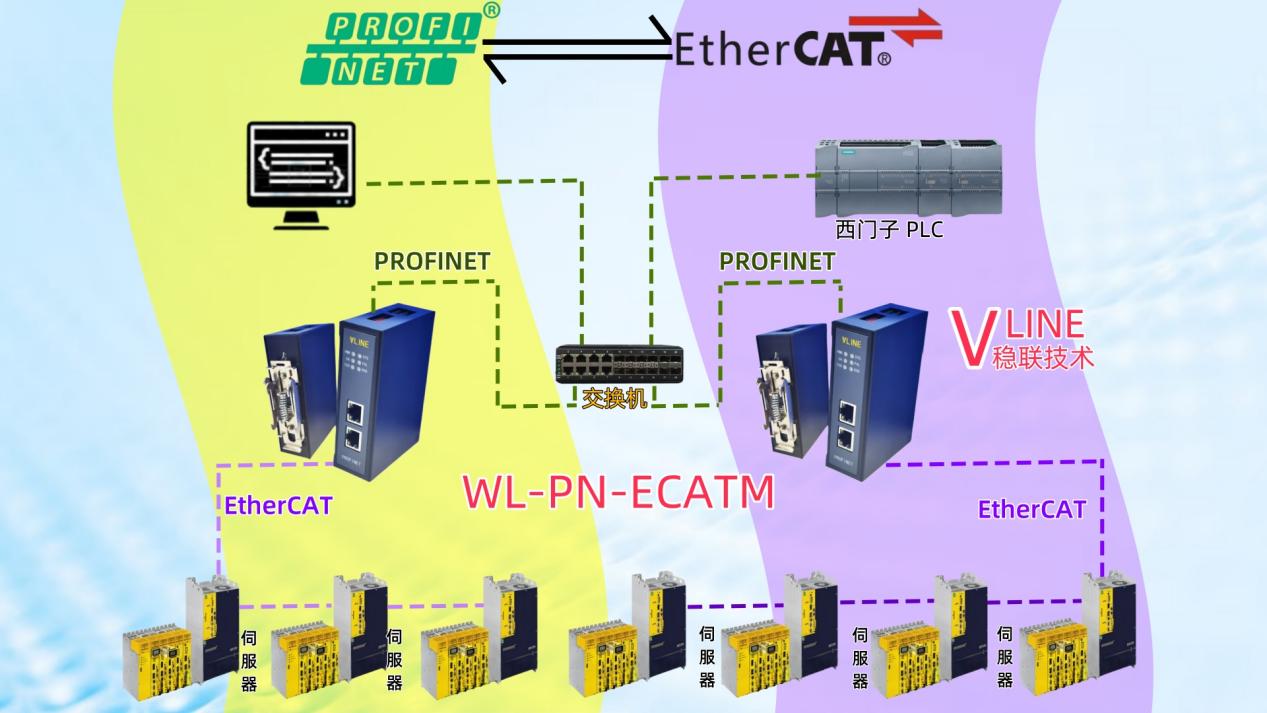
YC-ECTM-PN是PN(Profinet)转EtherCAT网关,通过数据映射方式工作。
YC-ECTM-PN在PN侧作为PN从站,接西门子PLC的Profinet口;在ETHERCAT侧做为ETHERCAT主站,接ETHERCAT从站,如伺服驱动器、变频器等。使用场景:西门子PLC使用Profinet控制ETHERCAT从站。

PN侧支持PNRTRealTimeClass1,ClassAandB;ETHERCAT侧支持COE。
四、应用实例
实例拓扑如下图,用西门子1200/200Smart控制ETHERCAT伺服。

汇川SV660N伺服驱动器EtherCAT部分简介(参考SV660N手册):
SV660N是汇川EtherCAT交流伺服驱动器。
采用的是IEC61800‑7(CiA402)‑CANopen运动控制子协议。仅支持DC同步模式。同步周期由SYNC0控制。
支持7种控制模式。
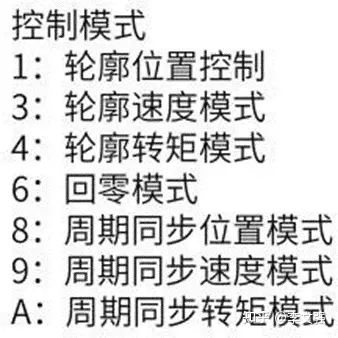
本例程采用“周期同步位置模式”,模式字为8。
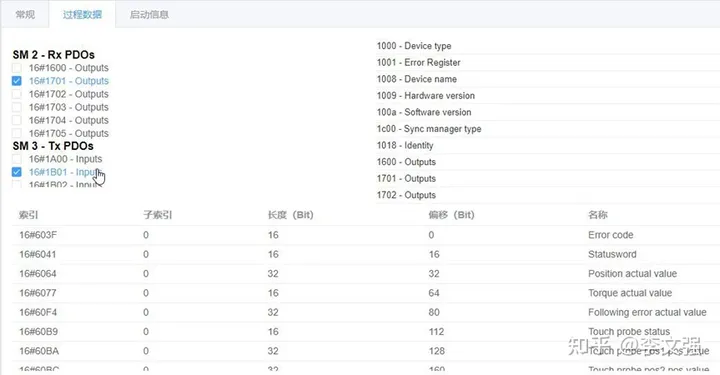
SV660N可用PDO如下:
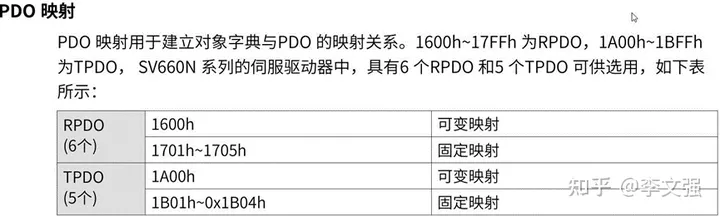
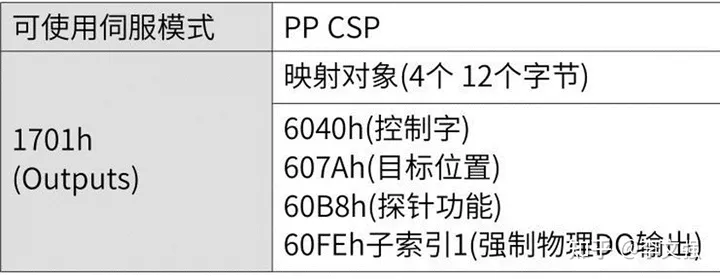
根据SV660N手册,使用“周期同步位置模式”可以使用固定映射RPDO
0x1701和TPDO0x1B01。这两个PDO映射参数如下图所示:

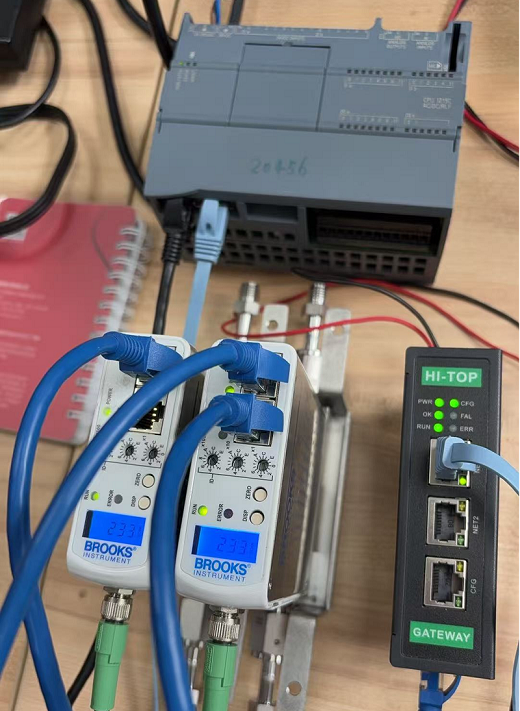
1、连接硬件,电脑连接Config口用来配置ETHERCAT部分,电脑连接Profinet
口用来组态Profinet。EtherCAT口只用来连接伺服驱动器。
2、安装配置软件、拷贝xml文件、启动配置软件
3、在从站列表添加配置SV660N从站,在“常规”里面设置同步模式,在过程数据里面配置PDO。
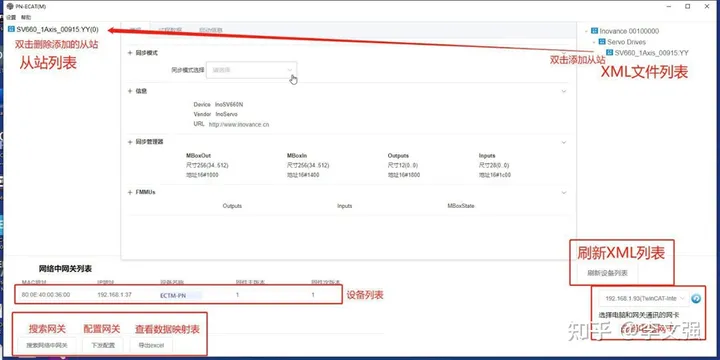
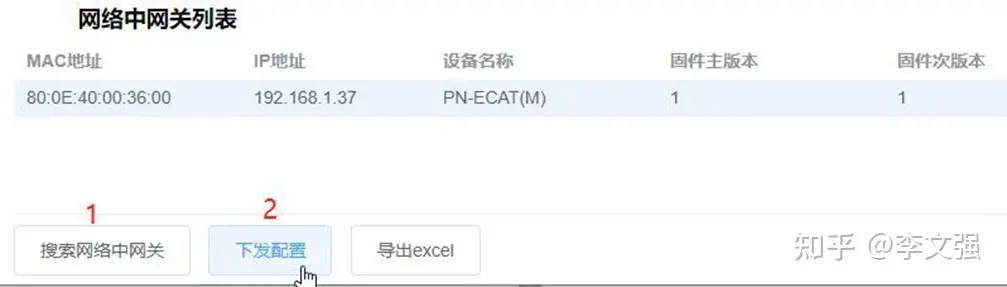
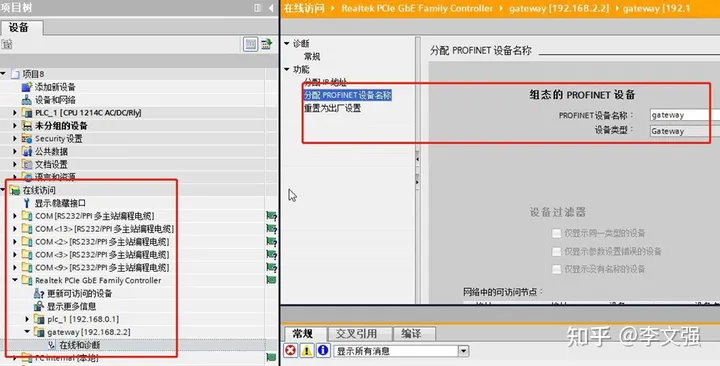
4、选择电脑网卡,搜索并配置网关
博途v15下添加PN端设置
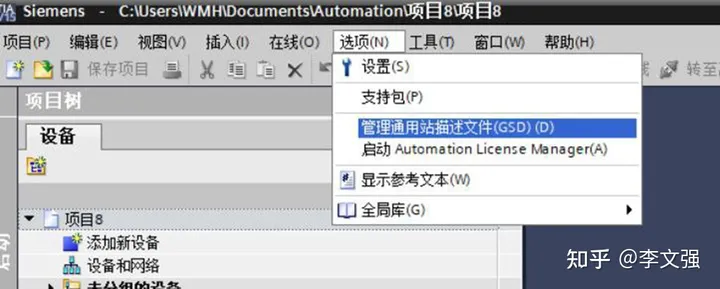
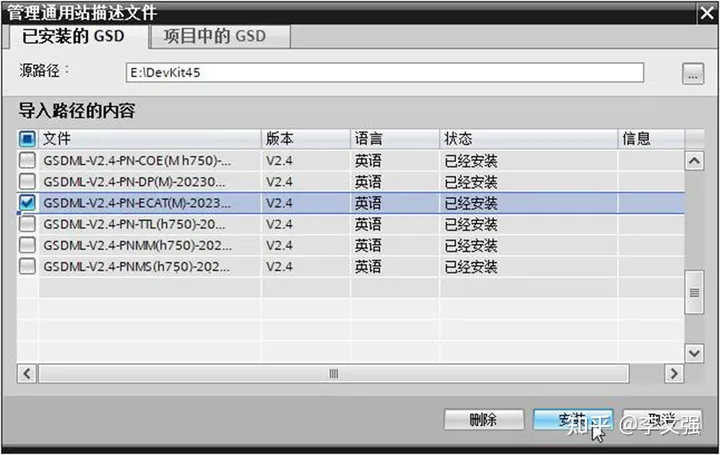
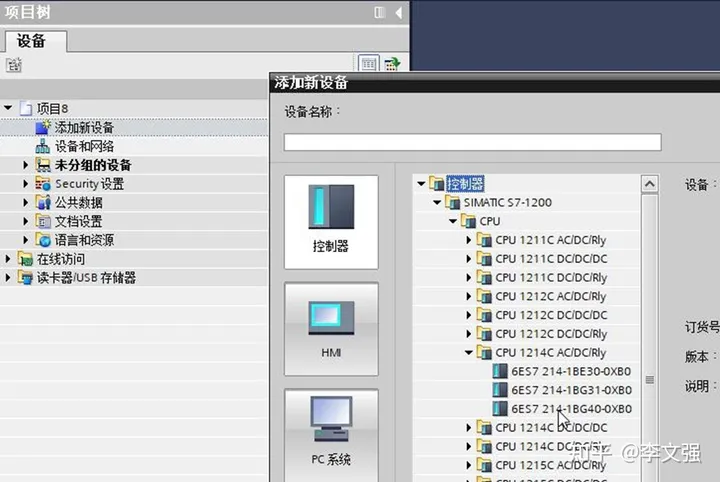
打开博途v15,点击新建工程,输入工程名称,安装GSD文件
2、添加PLC,根据现场实际PLC型号添加
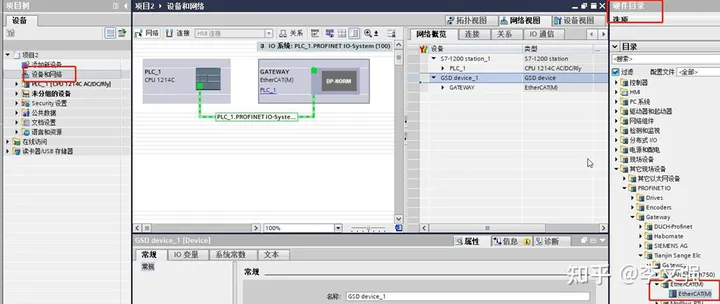
3、添加网关
4、给网关添加输入输出,根据导出的excel表格计算出来需要12个字节Q
和28个字节I,可以给插槽如下:
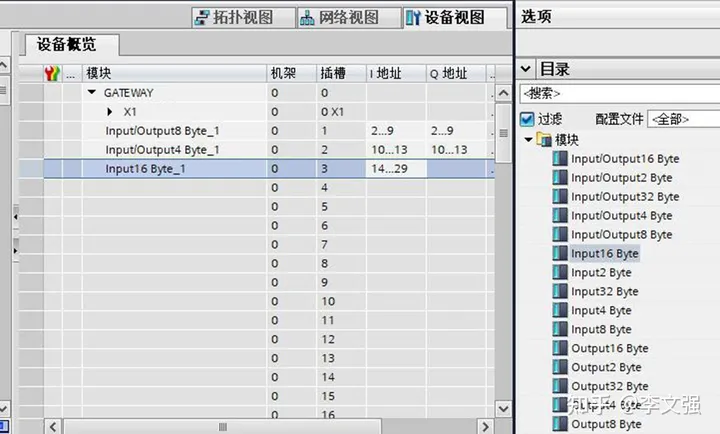
如上图所示PN端输出占了12个字节QB2-QB13,输入占了28个字节
IB2-IB29。
5、设置设备名称,组态页面和网关实际名称要一样
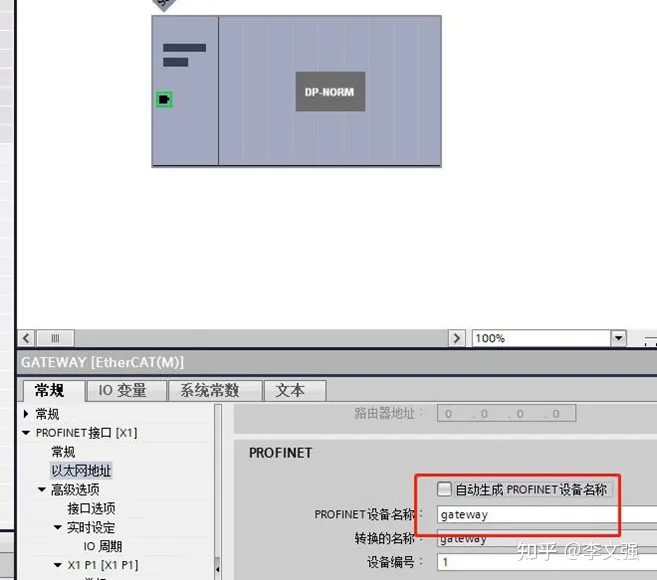
如果实际设备名称和组态名称不同需要修改到相同,否则无法组态成功。
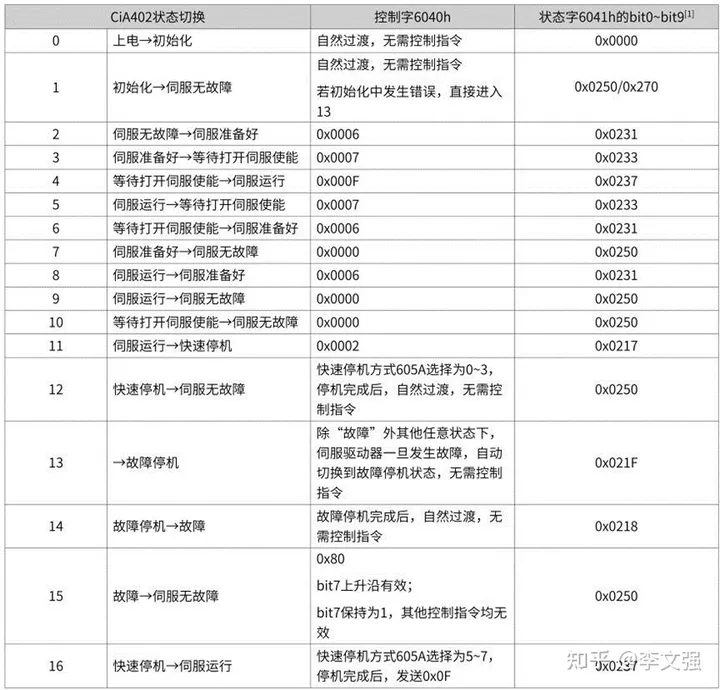
6、下载程序并建立监控表,通过CIA402规约引导伺服启动

这里只显示了部分对象,没有将所有对象显示出来。当Statusword是0x1650,所以Controlword写入6。

当Statusword是0x1631,所以Controlword写入7。

当Statusword是0x1633,所以Controlword写入15。

此时Statusword是0x1637,至此,伺服已经启动。

之后可以看到伺服当前位置Positionacutal是12,直接给目标位置Target
position一个新值1000000,写入去,此时伺服会转动一下,并且当前位置值变成了999998。

附录:
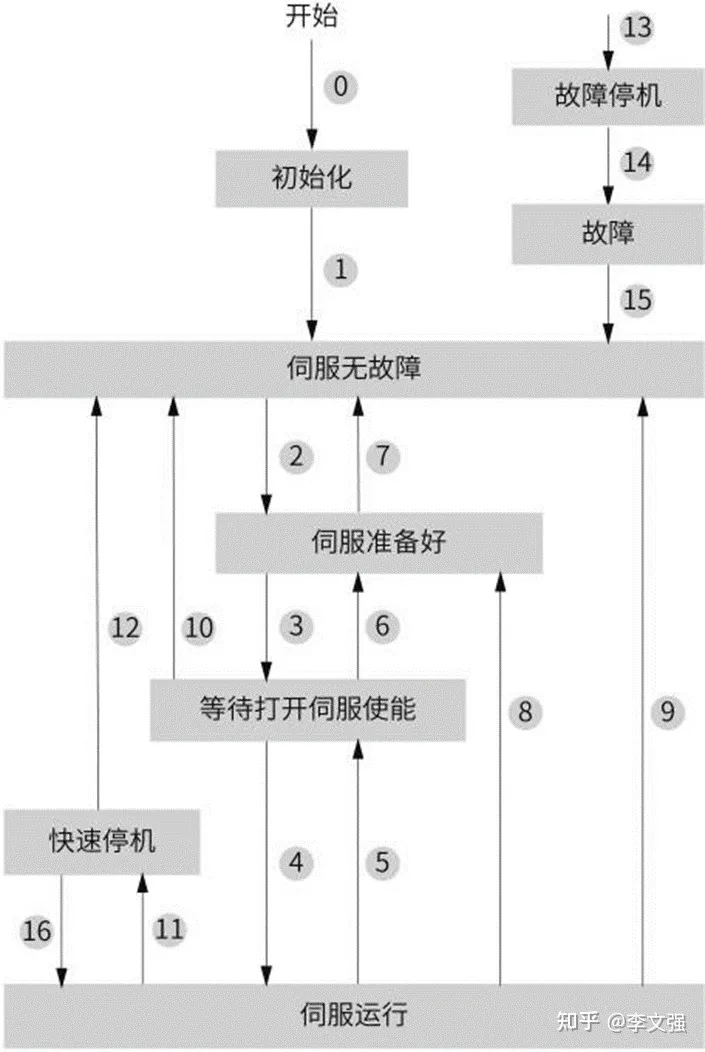
CIA402状态引导图
审核编辑 黄宇
-
西门子
+关注
关注
98文章
3402浏览量
120858 -
Profinet
+关注
关注
9文章
2396浏览量
28389 -
ethercat
+关注
关注
20文章
1612浏览量
46305
发布评论请先 登录
新手友好,Profinet转EtherCAT网关,第一次基础配置过程

EtherCAT转Profinet网关与一体式伺服EtherCAT通讯系统配置要点

无需更换PLC!让西门子S7-1200轻松驱动汇川EtherCAT伺服

伺服驱动互联密码:Profinet转EtherCAT网关配置案例

智能立库堆垛机西门子1500PLC通过EtherCAT主站转Profinet实现和与多个伺服进行通讯
西门子PLC通过稳联技术EtherCAT转Profinet网关连接baumuller伺服器的配置案例
EtherCAT主站转Profinet网关接汇川伺服操作模式的控制解析

打破协议壁垒!三格电子Profinet转EtherCAT主站网关,让工业设备自由对话
Brooks流量计通过HT1S-ECM-PNS与西门子1200PLC通讯
Profinet转EtherCAT网关模块怎么用:案例分享

硬干货,profinet转Ethercat主网关应用方案落地分享

汇川IS620N伺服驱动器如何通过etherCAT主站转profinet网关与西门子1200plc通讯

EtherCAT主站转Profinet网关如何把汇川伺服接入到西门子plc
EtherCAT主站转Profinet网关接IS620N伺服驱动器与西门子plc通讯案例



评论