 磁响应“双面神折纸”机器人实现多样化液滴操纵
磁响应“双面神折纸”机器人实现多样化液滴操纵
对跨尺度液滴的多样化操纵,在精细化学和生物医疗检测等领域都有重要的应用前景。从实用角度出发,有效的液滴操纵技术需要多功能集成及多尺度适用性。近年来,磁激励凭借其远程可控、生物安全性好、对环境透射率和基底电荷不敏感等优势已被广泛应用于液滴操纵领域。然而,如何进一步扩展磁响应液滴操纵的功能,并将多样化的液滴操纵功能从微升尺度扩展到纳升尺度仍极具挑战。
鉴于此,中国科学技术大学微纳米工程实验室胡衍雷教授、吴东教授团队利用飞秒激光微纳制造方法,制备了一种可用于跨尺度液滴操纵的磁响应双面神折纸机器人,实现了多样化液滴操纵功能的有效集成,包括液滴的三维运输、合并、分裂、子液滴分发与按需释放、搅拌以及远程加热。同时,这种操纵策略的高稳定性赋予了其跨尺度液滴操纵能力,可以实现对~ 3.2 nL到~ 51.14 μL体积范围内液滴的多样化操纵。相关成果以“Magnetic Janus origami robot for cross-scale droplet omni-manipulation”为题发表在Nature Communications期刊上。
磁响应双面神折纸机器人为矩形薄片状结构,机器人的上下表面分别具有不同的润湿特性,其上表面为超疏水低液滴黏附状态,而下表面则为疏水高液滴黏附状态。同时,机器人的上表面还设计了两条折痕,以使机器人与液滴相接触时,可以在毛细力的作用下沿着折痕自发包裹液滴。机器人整体轮廓、折痕和表面微纳功能结构的加工和改性均由飞秒激光扫描而成。
磁响应双面神折纸机器人可以实现多样化的液滴操纵功能。机器人通过翻滚主动靠近并包裹水滴,可以实现对水滴的可控运输(图1b,视频1)。除此之外,机器人还可以通过定向翻滚与折叠从大液滴中分发出子液滴(图1c),并通过折叠挤压以及可控翻转释放出子液滴(图1d)。机器人也可以在磁场作用下旋转,实现液体的可控混合,并结合其光热特性实现远程加热。
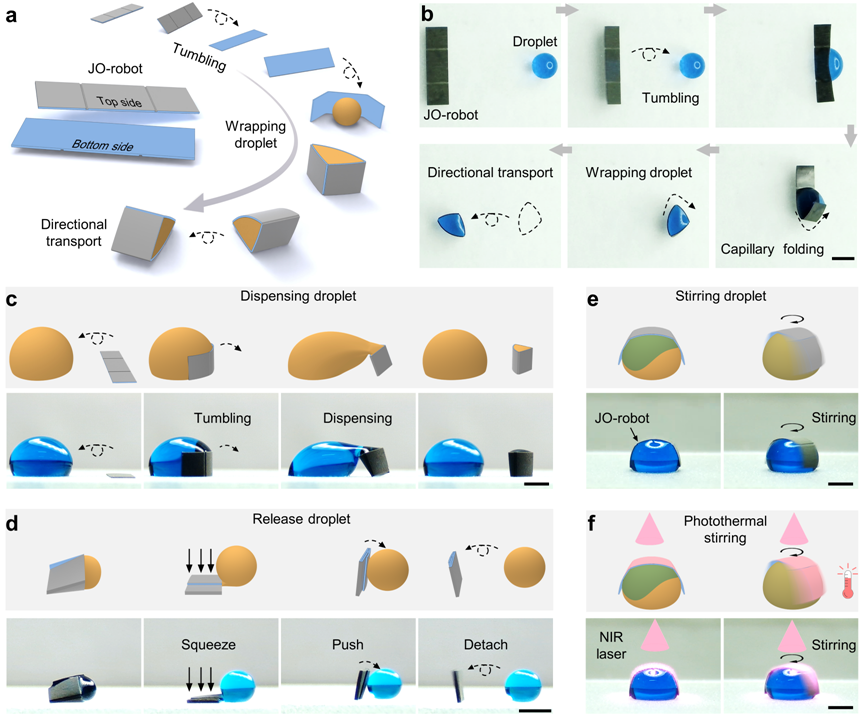
图1 磁响应双面神折纸机器人及其多功能液滴操纵应用

视频1磁响应双面神折纸机器人包裹并运输液滴
如前所述,磁响应双面神折纸机器人可以实现类似于商业化磁力搅拌机的搅拌及加热功能。如图2a ~ 2c所示,机器人悬浮在液滴顶部,并在磁场的驱动下快速旋转,可以对液滴进行高效混合。荧光分布图清晰展示了搅拌过程中液滴的混合程度(视频2)。利用近红外激光照射机器人还可以产生光热效应,实现对液滴的远程加热。加热温度可以达到80℃以上。结合光热特性和磁控旋转,磁响应双面神折纸机器人能有效实现高粘度液体(甘油)的快速混合(图2d ~ 2f)。
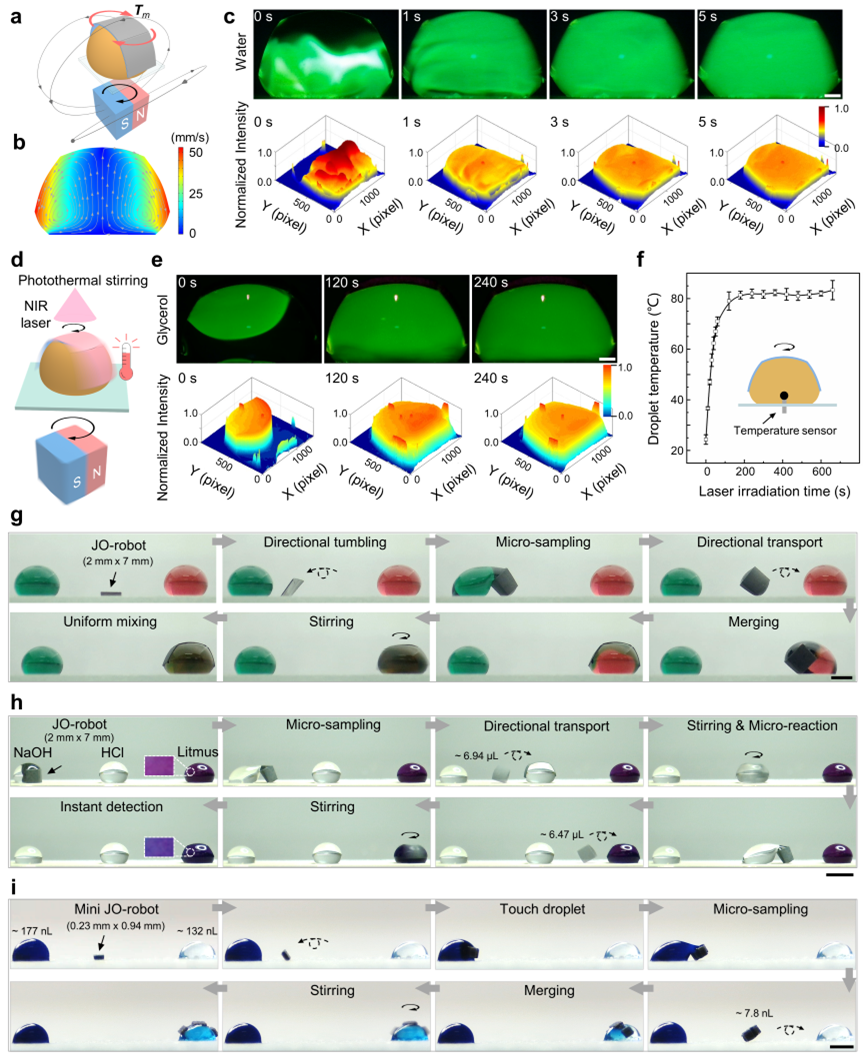
图2 基于磁响应双面神折纸机器人的液滴搅拌、光热搅拌以及多功能液滴操纵集成
视频2 磁响应双面神折纸机器人用于实现液滴快速混合
在实现多样化液滴操纵的基础上,磁响应双面神折纸机器人可以将多种液滴操纵功能有效集成,以实现连续的液滴操纵目标。如图2g所示,机器人通过翻滚运动主动靠近绿色液滴并分发出一定体积的子液滴,随后将子液滴定向运输至红色液滴附近以实现两个液滴的合并,最终通过搅拌完成液滴的快速混合(视频3)。这种多功能液滴操纵集成可以应用于微化学反应领域,实现液体样品的精确采样、快速反应以及反应物的及时检测(图2h)。此外,凭借稳定的液体操纵性能,多样化液滴操纵集成还能够有效扩展到纳升尺度液滴上(图2i)。
视频3 多样化液滴操纵功能集成
最后,作为概念验证,研究人员通过对磁响应双面神折纸机器人进行表面修饰,并结合其多样化的液滴操纵功能,成功实现了核酸的提取和纯化(图3)。
总之,磁响应双面神折纸机器人可以实现多样化的跨尺度液滴操纵,对精细化工、医疗诊断和微流控技术等广泛需要精确获取和添加试剂、微液滴图案化和快速微液滴反应的领域具有重要意义。
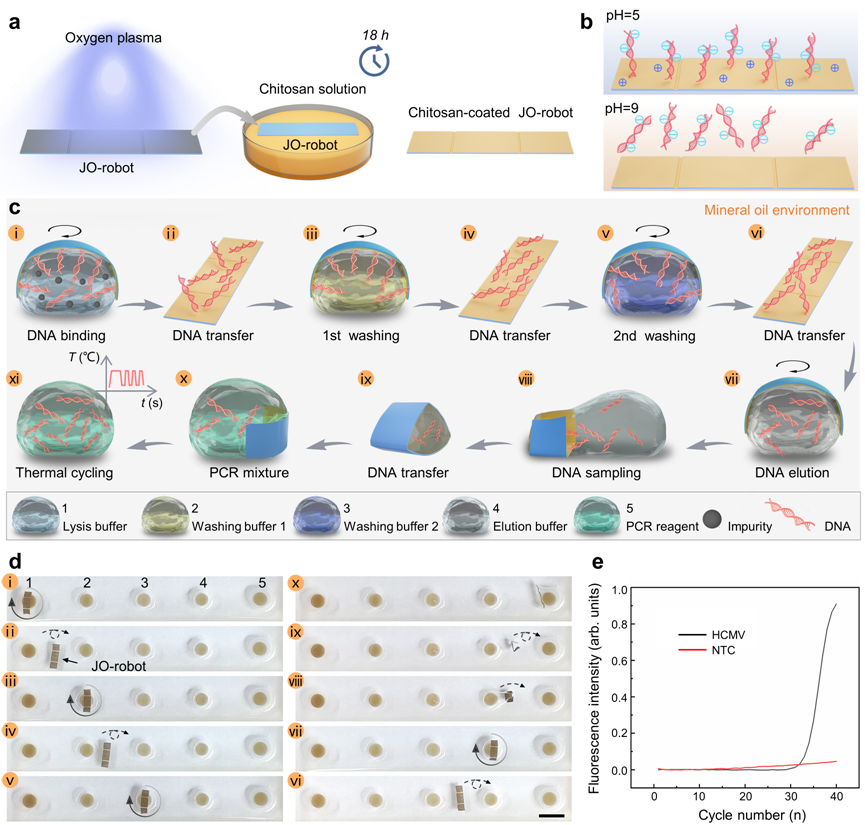
图3 基于磁响应双面神折纸机器人的核酸提取与纯化应用
工程科学学院蒋绍军博士为论文第一作者。通讯作者为中国科学技术大学胡衍雷教授、吴东教授和香港理工大学王立秋教授。论文的合作者还包括中国科学技术大学褚家如教授、李家文副教授、中国科学院合肥物质科学研究院安徽光学精密机械研究所朱灵研究员、中国科学技术大学第一附属医院沈佐君教授等。该项研究工作得到了国家自然科学基金优秀青年科学基金、中国科学院青年创新促进会、科技部国家重点研发计划等基金等项目的支持。
该工作是团队近期关于磁响应液滴操纵相关研究的最新进展之一。如何提升磁响应液滴操纵的灵活性一直是当前研究的重点,为此团队发展了多种磁响应液滴操纵策略(Advanced Materials, 2019, 31(15): 1807507;Nano Letters, 2020, 20(10): 7519-7529;ACS Applied Materials & Interfaces, 2020, 12(37), 42264–42273;Langmuir, 2023, 39(27), 9358-9366.),提升了磁响应液滴操纵的速度,扩展了操纵的空间维度,并成功将磁响应操纵策略从单相(液相)扩展到了三相(液相、固相和气相)物质的可控操纵(Advanced Functional Materials, 2022, 32(40): 2205831)。
审核编辑:刘清
-
机器人
+关注
关注
211文章
28543浏览量
207615 -
红外激光器
+关注
关注
0文章
23浏览量
8810
原文标题:磁响应“双面神折纸”机器人,实现跨尺度、多样化液滴操纵
文章出处:【微信号:Micro-Fluidics,微信公众号:微流控】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
【「具身智能机器人系统」阅读体验】2.具身智能机器人大模型
【「具身智能机器人系统」阅读体验】1.全书概览与第一章学习
《具身智能机器人系统》第7-9章阅读心得之具身智能机器人与大模型
【「具身智能机器人系统」阅读体验】+数据在具身人工智能中的价值
【「具身智能机器人系统」阅读体验】+初品的体验
NOVA无误差液滴微流体
华为携手中国移动、乐聚机器人探索5.5G网络下机器人应用
功率放大器在机器视觉下液滴操控与荧光分析检测中的应用
医疗机器人的发展前景
Al大模型机器人
DC/AC电源模块:实现电力系统的多样化应用
基于飞凌嵌入式RK3568J核心板的工业机器人控制器应用方案
其利天下技术·搭载无刷电机的扫地机器人的前景如何?
生医应用的磁控胶囊机器人,实现多模态响应与多功能集成






 工商网监
工商网监
评论