 什么是舵机?舵机的种类有哪些?目前舵机的主要使用场景
什么是舵机?舵机的种类有哪些?目前舵机的主要使用场景
什么是舵机呢?首先,“舵机”这个名号其实是一个俗称,是那些玩航模、船模的人起的名字,因为这种电机常被用于舵面控制。舵机其实就是一个低端一点的伺服电机系统,也是最常见的伺服电机系统。
舵机是一种位置(角度)伺服的驱动器,适用于需要角度不断变化并可以保持的控制系统,由下壳、控制电路、电机、中壳、齿轮组、轴承以及上壳组成。舵机是一个闭环控制系统。控制电路板接收来自信号线的控制信号,控制电机转动,电机带动一系列齿轮组,减速后传动至输出舵盘。舵机的输出轴与位置反馈电位计相连,舵盘转动的同时带动位 置反馈电位计,电位计将输出一个电压信号到控制电路板进行反馈,然后控制电路板根据所在位置决定电机转动的方向和速度,从而达到目标停止。
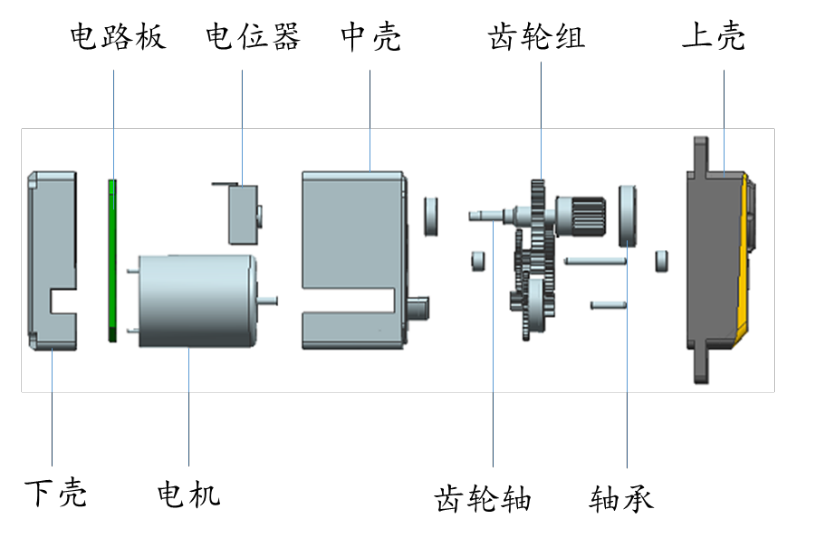
图1.1-舵机内部结构图
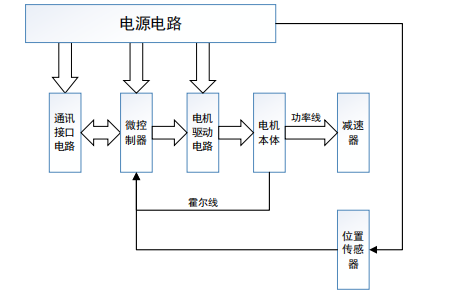
图1.2-舵机控制流程图
舵机的种类
舵机又有哪些种类呢?舵机根据电子分类可以分为模拟舵机与数字舵机。模拟舵机通过简单地发送开关脉冲来调节电机的速度,对小指令的反应迟缓,马达旋转较慢快。数字舵机相对于传统模拟舵机可以根据微处理器的程序运算而调整激励马达的动力,以适应不同的功能要求,并优化舵机的性能,能提供更高的精度以及更快的响应和加速效果。根据信号类型可以分为PWM信号舵机、RS-485串口型舵机、TTL串口型舵机。主要有普通型、超小型,强力型和特殊用途型等几种。
一、PWM信号舵机
相对于模拟通讯对噪声的抵抗能力更强,从模拟信号转向PWM信号可以极大地延长通信距离。在接收端通过适当的RC或LC网络可以滤除调制高频方波并将信号还原为模拟形式,实现了用数字方式来控制模拟信号,其高频率、高效率、高可靠性的特点大大降低了成本和功耗。
二、RS-485串口型舵机
采用平衡发送和差分接收,具有良好的抗干扰能力,信号能传输上千米。一条总线上允许挂载多个舵机,且总线上每个舵机都有一个唯一的ID(0~250),控制器通过舵机ID对特定的舵机进行访问,也可以通过广播ID(254)向总线上的全部舵机发送数据,另外可以使用超级ID(253)向总线上的舵机发送查询命令,不同ID的舵机进行分时应答。
三、TTL串口型舵机
采用并行数据传输方式,对于计算机处理器控制设备内部的数据传输较好,同时对于电源的要求不高以及热损耗也较低,另外TTL电平信号直接与集成电路连接而不需要价格昂贵的线路驱动器以及接收器电路。
四、CAN总线舵机
采用串行异步通信,同一时刻只能有一个发送或接收信息,由CAN_H和CAN_L两条信号线,以差分信号的形式进行通讯, 抗干扰能力强。高低电平幅度低,数据传输速度相对较高。
使用场景
舵机在机电系统中作为基本的输出执行机构,简单的控制和输出使得单片机系统能轻松与其进行对接,其优越的角度控制性能在飞机、潜艇模型,遥控机器人、物流、机器人、人工智能、汽车等领域中被广泛使用。例如,在无人机或航模中,舵机可以控制机翼的上下、左右转动,从而控制飞行方向、高度等。在机器人中,舵机可以控制机器人的关节运动,使机器人能够完成各种复杂的动作,如抓取、拍摄、移动等。
 德晟舵机遥控飞机中的应用
德晟舵机遥控飞机中的应用 -
电机
+关注
关注
142文章
8996浏览量
145329 -
舵机
+关注
关注
17文章
267浏览量
41007 -
伺服舵机
+关注
关注
0文章
16浏览量
5041 -
数字舵机
+关注
关注
1文章
11浏览量
6310
发布评论请先 登录
相关推荐
探索科技前沿,领略舵机技术的无限魅力
安信可Ai-WB2+舵机控制(SG90)

舵机在无人机中的应用

探索智能动力之源:揭秘舵机的无限可能
ESP32控制舵机的正反转原理是什么
舵机是什么?舵机内部结构解析
舵机是否属于伺服电机
机器人舵机:关键要素解析与选择指南
常用舵机型号及对应参数
全新升级,最大扭矩可达17kgf.cm的矮身无刷舵机

专为RWD漂移设计的15KG矮身舵机

舵机三根线分别是什么?一文解析舵机各线缆对应关系





 工商网监
工商网监
评论