 运算放大器和仪表放大器构建的电流源操作和动态性能
运算放大器和仪表放大器构建的电流源操作和动态性能
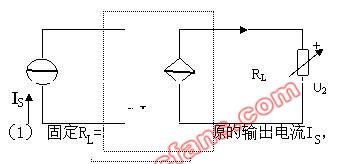
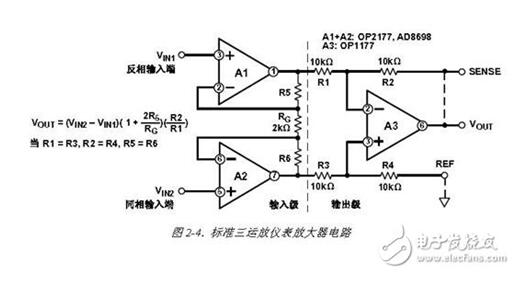
本文研究了围绕运算放大器和仪表放大器构建的电流源的操作和动态性能。如下图所示,运算放大器反馈环路中的仪表放大器使运算放大器的输出产生的负载电流与负载电阻无关。
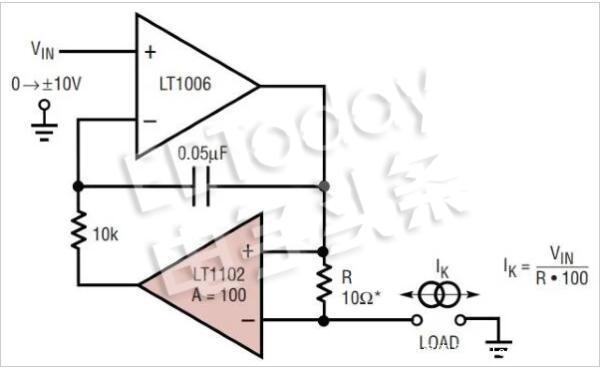
该电路具有高精度和良好的动态性能,并且在控制输入电压和产生的负载电流之间提供了简单明了的关系。在讨论拓扑的操作和动态性能之前,将先讨论LTspice中得电路。
LTspice实现
LTspice版本的电路如下所示。
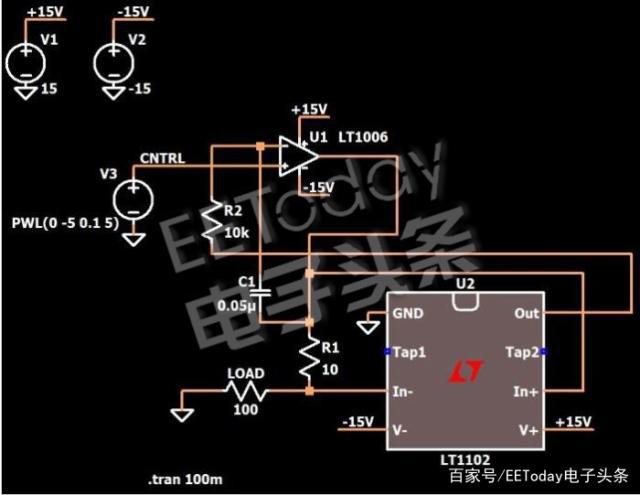
LTspice包含了原始设计中使用的精确组件的宏模型。如果想在这个电路中加入不同的放大器,强烈建议选择带有宏模型的部件。我的直觉告诉我,这是在构建之前应该模拟的那种电路;如您所见,LT1102的引脚2和引脚7当前已断开连接。这将器件配置为固定增益为100,并且得到的传递函数为I LOAD=VCNTRL/(R1×100)。
如果将引脚2连接到地,引脚7连接到引脚8,LT1102的增益将为10,在这种情况下,传递函数变为ILOAD=VCNTRL/(R1×10);上图中显示的控制电压是一个斜坡,在100 ms的时间内从-5 V延伸到+5 V。该控制电压将用于演示电路的低频性能。
低频操作
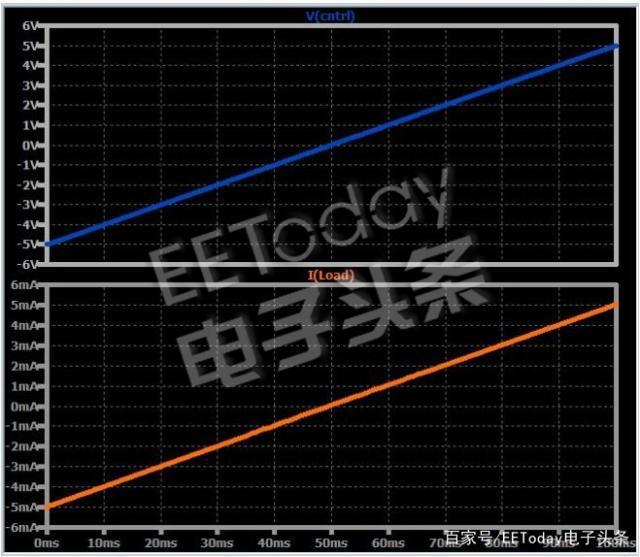
下图显示了电流源对缓慢变化的输入电压的反应。正如预期的那样,负载电流从-5 mA线性增加到+5 mA。
将数学传递函数应用于控制电压,绘制出理论输出电流与模拟输出电流之差,可以估计电路的低频精度。
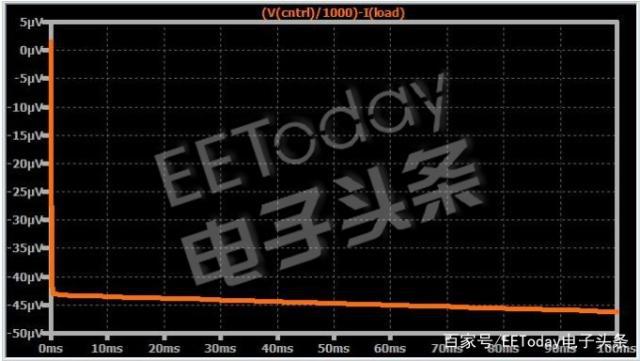
所看到的误差大约是45μV,在-5伏到+5伏的输入电压范围内只有微小的变化。考虑到两个放大器中存在的各种非理想情况,这对我来说似乎相当不错(尽管我不知道这些非理想性如何被整合到宏模型中)。
但是,该误差假定R1 恰好为10Ω。由于R1(与仪表放大器的增益一起)决定了控制电压和输出电流之间的比例常数,如果希望实际传递函数复制理论传递,则必须使用极低容差的电阻。另一方面,如果这是用于一次性项目或原型或其他类似项目,可以简单地测量R1的电阻,然后根据测量的电阻值而不是理想值生成控制电压。运行了一些具有不同负载电阻值的仿真,总趋势是随着负载电阻的增加误差减小。例如,R LOAD =600Ω时的误差约为19μV。
动态性能
该电流源基于负反馈,其本身涉及与稳定行为相关的一些延迟,并且放大器具有带宽和转换速率限制。因此,我们不应期望该电路将快速输入电压变化转换为同样快速的输出电流变化。但是,考虑到所有因素,输出具有很好的再现控制电压突变的能力,要注意这些突然的变化不会产生过多的振幅。为了模拟动态响应,将电压源更改为从0 V到5 V的脉冲,上升/下降时间为1μs。输入信号和产生的输出电流信号如下所示。
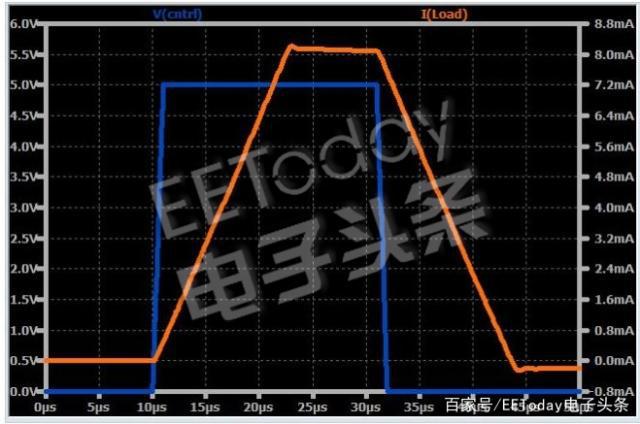
RLOAD=600Ω时的动态性能。
Linear Tech应用程序将此电路的动态响应描述为“受控”。输出电流以均匀的方式(0.65 mA /μs的斜率)增加和减少。上升沿或下降沿没有振幅,过冲幅度非常低。一个有趣的细节如下图所示。在下降沿之后,输出电流需要(相对)长的时间才能返回到0 mA的预期值。
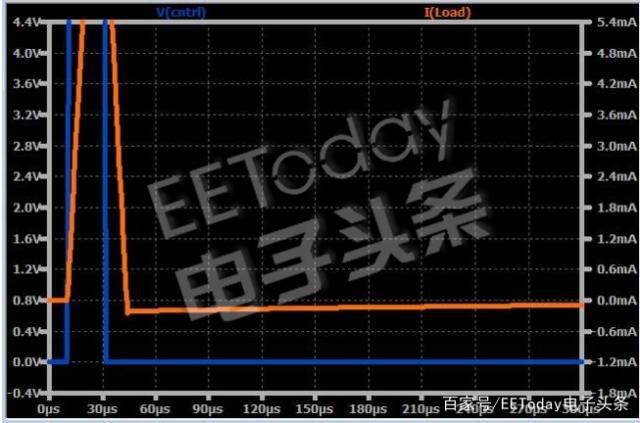
C=0.05μF时的恢复行为。
可以通过减小电容值来缩短恢复时间,但这会导致瞬态响应不那么“受控”:
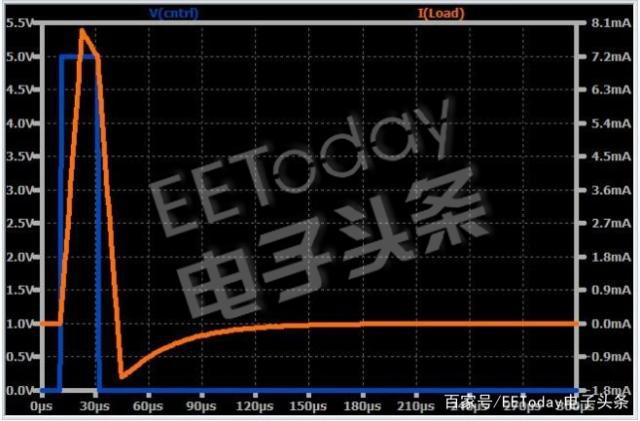
C=0.005μF时的恢复行为。
-
运算放大器
+关注
关注
215文章
5037浏览量
174015 -
电流源
+关注
关注
4文章
386浏览量
29487 -
仪表放大器
+关注
关注
17文章
413浏览量
71452 -
LTspice
+关注
关注
1文章
119浏览量
13567 -
负载电阻
+关注
关注
0文章
111浏览量
7970
发布评论请先 登录
相关推荐
放大器教程:运算放大器基础学习
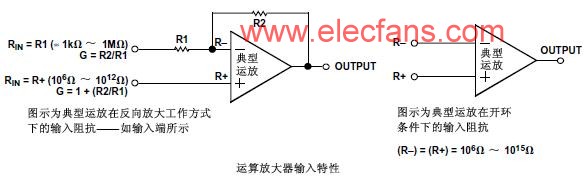
运算放大器与仪表放大器输入特性比较

运算放大器和专用放大器的基础教程






 工商网监
工商网监
评论