 为什么rs触发器可以消除机械抖动
为什么rs触发器可以消除机械抖动
RS触发器可以消除机械抖动的原因是它具有锁存的功能,可以稳定输入信号的状态。机械抖动是指接触或按下开关等机械装置时,因为机械元件的震动或不稳定造成的短期的信号变化。
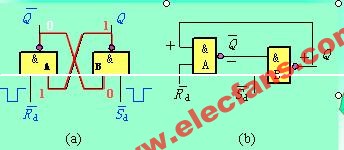
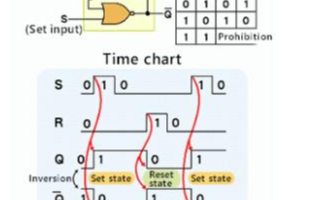
RS触发器是一种基本的数字逻辑电路,它由两个输入(R和S)和两个输出(Q和Q‘)组成。R和S分别代表复位(Reset)和置位(Set)信号。当R和S都是逻辑低电平时,RS触发器会保持上一个状态不变。当R和S都是逻辑高电平时,RS触发器会进入禁止状态。而当R为逻辑低电平,S为逻辑高电平时,输出Q会被置为高电平(或逻辑“1”),输出Q’会被置为低电平(或逻辑“0”);反之,当S为逻辑低电平,R为逻辑高电平时,Q会被置为低电平,Q‘会被置为高电平。
当机械抖动引起开关信号产生瞬时的多个开关状态变化时,这种变化可能会导致错误的结果。但是,将机械开关的输出连接到RS触发器的输入时,触发器会稳定输出正确的状态,并消除抖动信号的影响。这是因为RS触发器只在输入信号稳定时才会响应状态的改变,而当输入信号瞬时变化时,触发器会将之前稳定的状态保持不变。
因此,通过使用RS触发器可以稳定和消除机械抖动的效果,确保信号状态的准确性和一致性。这在数字电路和系统中是一种常见的方法,用以处理机械开关等可能引起抖动的信号输入。
rs触发器和sr触发器的区别
RS(Reset-Set)触发器和SR(Set-Reset)触发器有一些区别,尽管它们的功能和原理基本相似。以下是它们的主要区别:
1. 输入极性:RS触发器的输入极性是低电平有效,即当R和S都为低电平时触发器保持状态不变。而SR触发器的输入极性则是高电平有效,当S和R都为高电平时触发器保持状态不变。
2. 禁止状态:RS触发器存在一种禁止状态,即当R和S同时为高电平时触发器进入禁止状态,输出无效。这是因为RS触发器中的两个输入虽然同时具有逻辑“1”,但其输入状态不确定,可能导致无效的输出。SR触发器则不存在禁止状态,即使S和R同时为高电平,触发器仍能正确工作。
3. 触发方式:RS触发器通常使用异步触发方式,即当输入信号发生变化时,立即作用于触发器的状态。SR触发器可以采用同步(时钟触发)或异步触发方式,取决于具体设计。
需要注意的是,为了防止不确定性的输入状态,通常在实际电路设计中,会对RS和SR触发器的输入进行控制,使其不同时置为逻辑高电平。例如,通过使用门电路实现预防输入重合状态。
尽管RS和SR触发器有区别,但它们都是基本的数字逻辑电路元件,用于存储和操作二进制数据。在实际应用中,选择使用RS触发器还是SR触发器取决于具体需求和设计要求。
rs和sr触发器的工作原理
RS(Reset-Set)触发器和SR(Set-Reset)触发器是基本的数字逻辑电路元件,用于存储和操作二进制数据。它们具有类似的工作原理,但又有所区别。
1. RS触发器的工作原理:
- RS触发器由两个输入:R(复位)和S(置位)构成。输出有两个:Q(主输出)和Q’(补码输出)。
- 当R和S都为低电平(通常为0)时,RS触发器保持上一个状态不变。
- 当R为低电平,S为高电平时,Q为高电平,Q‘为低电平。这将触发触发器进入“置位”状态。
- 当S为低电平,R为高电平时,Q为低电平,Q’为高电平。这将触发触发器进入“复位”状态。
- 当R和S同时为高电平时,触发器进入禁止状态,输出无效,状态不确定。
2. SR触发器的工作原理:
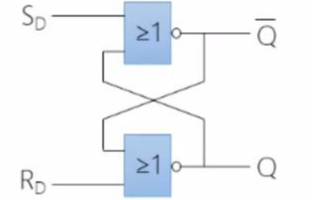
- SR触发器也由两个输入:S(置位)和R(复位)构成。同样有两个输出:Q(主输出)和Q‘(补码输出)。
- 当S和R都为高电平时,SR触发器保持上一个状态不变。
- 当S为高电平,R为低电平时,Q为高电平,Q’为低电平。这将触发触发器进入“置位”状态。
- 当R为高电平,S为低电平时,Q为低电平,Q‘为高电平。这将触发触发器进入“复位”状态。
- 当S和R同时为低电平时,触发器进入禁止状态,输出无效,状态不确定。
需要注意的是,为了防止不确定性的输入状态,通常在实际电路设计中,会对RS和SR触发器的输入进行控制,特别是在控制输入的变化和保证输入信号的稳定性方面要格外注意。
RS触发器和SR触发器在数字逻辑电路中广泛使用,可以用于存储二进制数据、实现时序逻辑功能和控制电路的状态等。
编辑:黄飞
-
逻辑电路
+关注
关注
13文章
494浏览量
42609 -
二进制
+关注
关注
2文章
794浏览量
41637 -
RS触发器
+关注
关注
3文章
101浏览量
17930 -
触发器
+关注
关注
14文章
2000浏览量
61124 -
数字逻辑电路
+关注
关注
0文章
106浏览量
15812
发布评论请先 登录
相关推荐
RS触发器是什么?解读rs触发器的作用和数字电路中的rs触发器的作用





 工商网监
工商网监
评论