 自动驾驶功能模块有哪些
自动驾驶功能模块有哪些
1.1 ADS核心计算模块(蓝色块部分)
感知模块 - 使用传感器数据、车辆里程计数据和后端信息(即地图数据)来检测和跟踪传感器视野内的基础设施和对象,以产生对象、特征或规范的数据。
场景理解 - 评估当前的驾驶场景,并预测或预见动态实体相对于自主车辆的意图和行为。
自车运动 - 使用不同的传感器输入估计车辆的运动,例如来自惯性测量单元(IMU)和车轮速度传感器等的数据。
定位 - 确定车辆的位置、方位和方向。
运动控制 - 与执行器包括制动器、转向系统和传动装置互动,以实现期望的轨迹。
任务控制 - 根据乘客状态、车辆操作者请求或行为规划器的直接反馈来维持或改变车辆任务;向操作者提供反馈。
乘客监控 - 确定车辆乘客的状态,并识别可能需要修改任务、动态驾驶任务(DDT)和/或策略规划(导航)的情况。
路径规划 - 确定车辆应该采取的到达目标目的地的路线。
行为规划 - 在定义的路线目标内做出操纵决策(例如改变车道、超车、紧急停车等)。
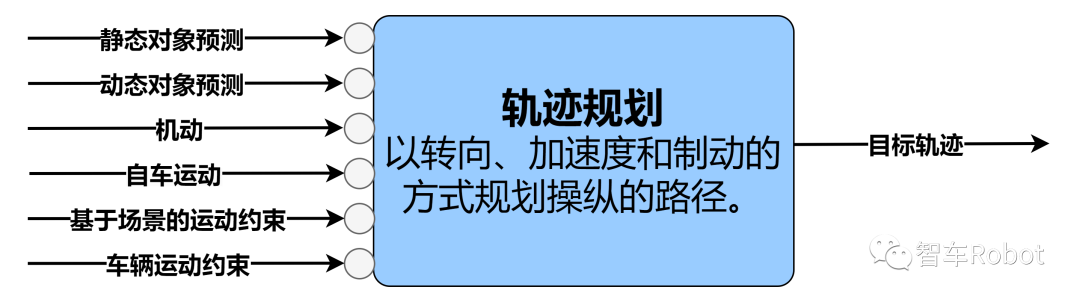
轨迹规划 - 规划操纵路径并为运动控制模块提供目标轨迹。
操作域监控 - 监控参与动态驾驶任务的实体的能力、状态和情况,以确保车辆在ODD(操作设计域)内运行。
2、服务模块(灰色块部分)
人机界面(HMI)- 作为车内乘客的主要接口,以向系统提供输入(例如踏板、方向盘、图形用户界面或其他),影响系统的行为,或向用户提供当前任务或面前任务的状态和/或约束的反馈。HMI也可以作为车辆与外界的接口,以确保行人或其他车辆知道车辆的意图、健康状态或操作状态。
互联服务 - 提供数据接口,确保自动驾驶系统接收最新的地图、交通或其他数据以支持面前的任务。通信具有双向性,例如提供自动驾驶系统信息、乘客健康状态或其他相关数据。
车辆对X(V2X)- 车辆对基础设施或车辆对车辆作为相关的系统输入,以支持车辆的安全和高效操作。这可以提供基础设施的信息(例如交通灯状态或位置),或自主车辆可能看不到的车辆的信息。
3、跨功能属性(黄色块部分)
上述构建模块代表了从L1到L5的端到端功能的主要模块。黄色模块涉及跨功能的属性,虽然重要,但不是计算功能的关键,在本文后续不会完整涵盖。
-
传感器
+关注
关注
2550文章
51000浏览量
752963 -
模块
+关注
关注
7文章
2692浏览量
47425 -
汽车电子
+关注
关注
3026文章
7929浏览量
166869 -
自动驾驶
+关注
关注
784文章
13779浏览量
166350
发布评论请先 登录
相关推荐
FPGA在自动驾驶领域有哪些应用?
FPGA在自动驾驶领域有哪些优势?
谷歌的自动驾驶汽车是酱紫实现的吗?
【话题】特斯拉首起自动驾驶致命车祸,自动驾驶的冬天来了?
细说关于自动驾驶那些事儿
自动驾驶的到来
AI/自动驾驶领域的巅峰会议—国际AI自动驾驶高峰论坛
如何让自动驾驶更加安全?
自动驾驶系统设计及应用的相关资料分享
自动驾驶技术的实现
自动驾驶线控底盘VCU功能介绍
自动驾驶轨迹规划功能模块图





 工商网监
工商网监
评论