 自动驾驶轨迹规划功能模块图
自动驾驶轨迹规划功能模块图

轨迹规划(路径规划)
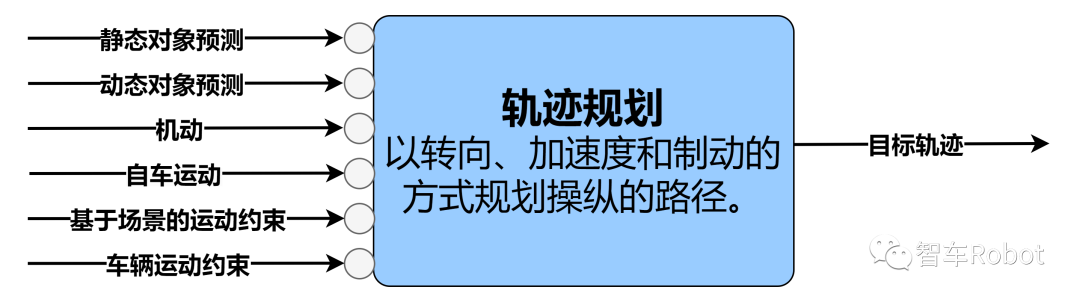
轨迹规划功能模块图
轨迹规划功能模块提供算法以规划机动的路径,以便控制转向、制动和加速。它与行为规划密切合作,有时两者作为相同算法的输出获得,或以反馈递归调整的方式获得。自动驾驶车辆依赖实时的车辆状态和环境信息(例如周围车辆、道路条件)来获得确保安全通行的本地轨迹,同时最小化偏离整体行程轨迹(来自路径规划的全局轨迹)。本地轨迹规划可以定义为实时规划车辆从一个可行状态到下一个可行状态的过渡。这一切都在满足基于车辆动力学的车辆运动学限制、乘客舒适度、车道边界和交通规则的约束下进行,同时避免障碍物。传感器范围、预测交通参与者运动的时间以及传感器不完善等限制将限制车辆的最大速度来计算机动。因此,对交通参与者运动进行风险评估预测是机动规划的一个重要部分,这通过基于模型的交通运动抽象级别来实现。用于避障的轨迹规划方法采用下表中显示的一种技术。

控制策略优缺点需要注意的是,上述所有方法都假设轨迹规划系统可以按需获得环境和前导车辆状态的精确知识。不稳健的轨迹规划方法可能会导致不可实现和/或不安全的参考轨迹,这在高速行驶期间尤其存在重大安全风险。上述讨论的各种轨迹规划技术提出了不同的方法来处理当前环境感知中的不确定性和有限的未来预测能力。
轨迹规划输入:
•静态对象预测:用于评估轨迹计算中的安全性和舒适性风险
•动态对象预测:用于评估轨迹计算中的安全性和舒适性风险
•机动:提供要进一步处理为轨迹的机动目标
•自车运动:用于轨迹计算
•基于场景的运动约束:提供驾驶场景条件的车辆运动限制,例如湿滑/劣化的路面,以在轨迹计算中考虑。
•车辆运动约束:提供来自运动控制的动态运动限制反馈,以应用于轨迹计算轨迹规划输出:•目标轨迹:沿轨迹路径表达转向、制动和加速变化的目标轨迹(曲线路径)
-
汽车电子
+关注
关注
3046文章
9086浏览量
173110 -
车辆
+关注
关注
0文章
86浏览量
15900 -
自动驾驶
+关注
关注
794文章
14976浏览量
181349 -
环境感知
+关注
关注
0文章
25浏览量
8216
发布评论请先 登录
【mBot申请】自动驾驶车
自动驾驶真的会来吗?
细说关于自动驾驶那些事儿
自动驾驶的到来
AI/自动驾驶领域的巅峰会议—国际AI自动驾驶高峰论坛
硅谷组建团队、L3产品落地,想法多多的腾讯自动驾驶
UWB主动定位系统在自动驾驶中的应用实践
如何让自动驾驶更加安全?
自动驾驶技术的实现
自动驾驶线控底盘VCU功能介绍
自动驾驶中基于图搜索的常用路径规划算法介绍

自动驾驶之路径规划

端到端自动驾驶多模态轨迹生成方法GoalFlow解析



评论