 伺服系统的控制模型解析
伺服系统的控制模型解析
来源:小牛机器人
常见的伺服控制回路(矢量控制方式)如下图所示,其中Clarke变换是从三相坐标系ABC到两相静止 坐标系的转换,而Park变换是从静止坐标系到与转子磁场同向的旋转坐标系的变换。其中 是实际位置反馈,n为速度,为转矩电流、为实际励磁电流。对于同步电机而言,励磁的设定,而异步电机根据电机参数而定。通常情况下,电流控制器与速度控制器均为PI控制器,二者在驱动器中设定;而位置环控制器为P控制器,在运动控制器中设定。
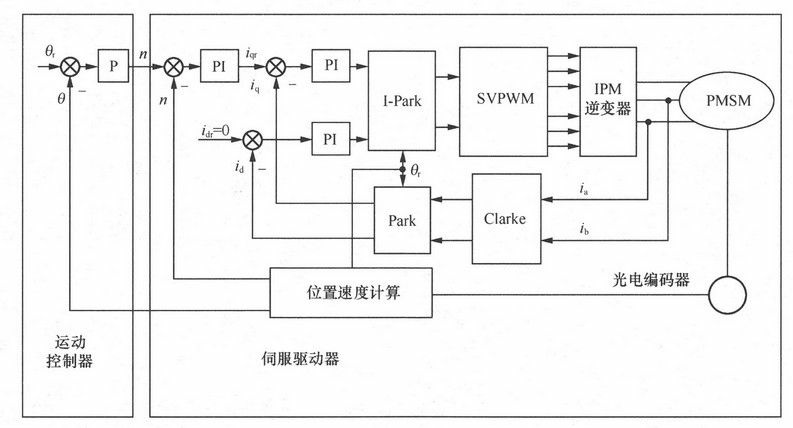
矢量控制结构图
从上图可以看出,在运动控制器中完成位置环的运算之后,输出的结果被标定为速度设定,通过通信或者脉冲的方式传递给驱动器,在驱动器中完成速度与电流控制。
伺服系统的控制模型
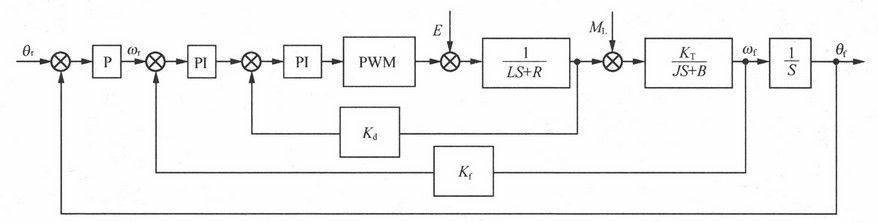
通常情况下,伺服系统中包括电流环、速度环以及位置环,如下图所示。其中电流环的等效传递函数为一阶系统函数,L为电机电枢电感,R为电机电枢阻抗。速度环的闭环传递函数为二阶系统函数,其中包括电机的一阶惯性环节,J为电机转子的转动惯量,B为电机的阻尼。
电机控制模型
通过电机的二阶系统分析可以得出,电机的定子阻抗与电感对系统的电流控制影响比较大,因此在驱动器中设定电机参数时,定子线间阻抗与电感必须设置正确,否则会引起系统的过电流故障。另外,电机的转动惯量对速度的调整影响大,而电机的阻尼通常被忽略。
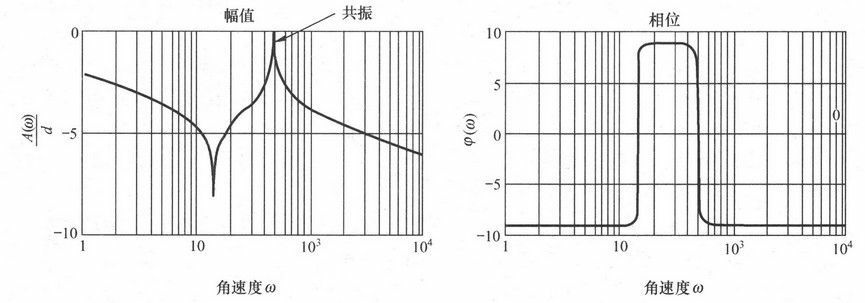
对于速度环构成的二阶系统,电机与负载因素会影响其动态性能,同时速度控制器的参数比例增益与积分时间也会影响二阶系统的性能,增加比例增益会增加系统的带宽,快速的积分会减小系统的静态误差,但是也会增加系统的阻尼。过小的阻尼会使二阶系统在截止频率处产生谐振,如下图所示。对于二阶系统,理想的系统阻尼为0.707。
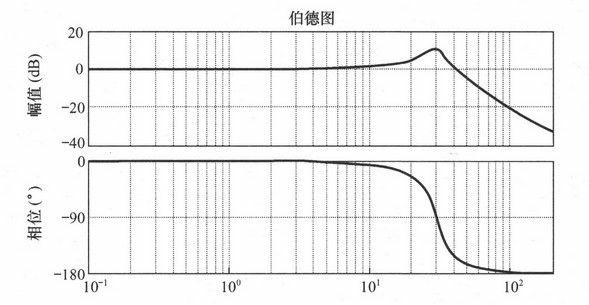
速度环伯德图
以上控制回路没有考虑负载对系统的影响,但在实际应用中,负载对整个系统的模型有着不可忽视的影响。例如,在电机与负载之间有减速箱、联轴器等机械传动设备时,电机的模型不能简化为一个积分或者是惯性环节,电机与负载以及中间连接器一起构成二自由度振动系统,如下图所示,其等效模型会叠加到速度环上,在系统的高频范围引起谐振。
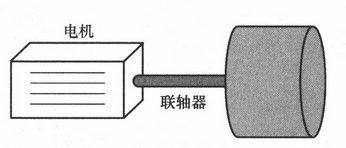
电机拖动负载
根据上图所示的机械结构,可以得到电机到负载的传递函数如下图所示。
从电机到负载的伯德图
如下图所示,负载与电机的惯量比大小是谐振峰的影响因素,惯量比越大,谐振越严重;但惯量比越小,电机的驱动能力都消耗到电机上,导致系统的效率太低。因此在选型与配置时要考虑此因素,保证负载与电机的惯量比在一个合适的范围内。实践中认为4∶1为最优的配置。
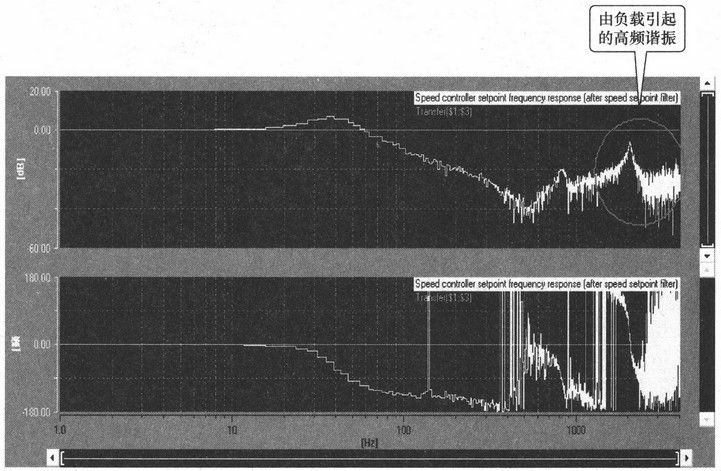
由负载引起的高频谐振
审核编辑:汤梓红
-
驱动器
+关注
关注
52文章
8208浏览量
146227 -
控制器
+关注
关注
112文章
16308浏览量
177783 -
机器人
+关注
关注
211文章
28366浏览量
206887 -
伺服系统
+关注
关注
14文章
572浏览量
39204 -
矢量控制
+关注
关注
2文章
284浏览量
32206
原文标题:基于矢量控制的伺服控制、伺服系统的控制模型
文章出处:【微信号:旺材伺服与运动控制,微信公众号:旺材伺服与运动控制】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐







 工商网监
工商网监
评论