 FPGA实现Cordic算法求解arctanθ
FPGA实现Cordic算法求解arctanθ
一. 简介
由于在项目中需要使用的MPU6050,进行姿态解算,计算中设计到arctan 和 sqr(x*2 + y * 2),这两部分的计算,在了解了一番之后,发现Cordic算法可以很方便的一次性求出这两个这两部分的计算。另外也可以一次性求出sin和cos的值。另外该算法还可以计算其他的一些公式(没做过多的了解)。
二.Cordic算法
该算法的核心实现就是旋转逼近,每次旋转一定的角度,无限的逼近所给定的角度值。
1. 理论基础
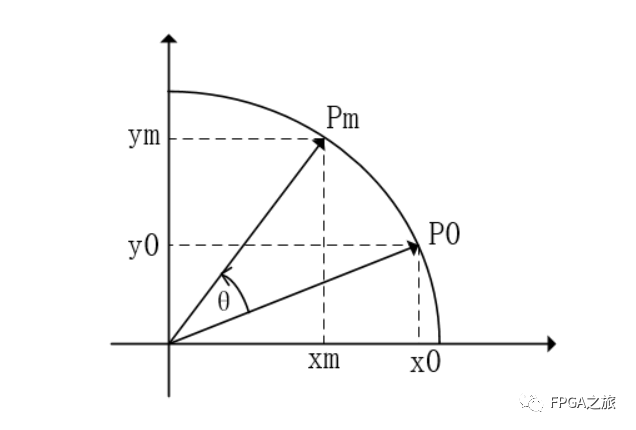
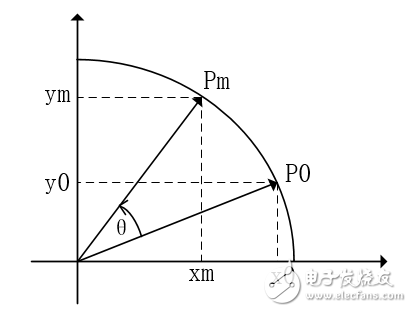
首先有向量P0,现在要将其旋转θ角度,到Pm。那么Pm的坐标值如下
xm = x0cosθ - y0sinθ = cosθ(x0 – y0tanθ)
ym = x0sinθ + y0cosθ = cosθ(y0 + x0tanθ)
P0和Pm均在单位圆上,另外假设现在P0在X轴上,即 X0 = 1,y0 = 0。上式就可以变为如下显示
xm = x0cosθ - y0sinθ = cosθ
ym = x0sinθ + y0cosθ = sinθ
可以看到Pm的坐标值,就是sinθ 和 cosθ的值。这就是理论基础。
2. sinθ 和 cosθ 算法实现
有了理论支持后,我们只需要求解Pm的坐标即可。直接旋转θ不太可能,但是我们可以每次旋转特定的角度θi (tanθi = 1/2^i),让我们的角度值逼近θ即可。于是就有了如下迭代公式。
x(i+1) = cosθi* (xi – yi * tanθi)
y(i+1) = cosθi * (yi + xi * tanθi)
θ(i+1) = θi (+-) dθi
如果当前角度小于设定角度,那么就加dθ ,大于设定角度 , 那么就减dθ。由于每次旋转的dθ,会越来越小,所以旋转的当前角度会越来越来接近设定角度。
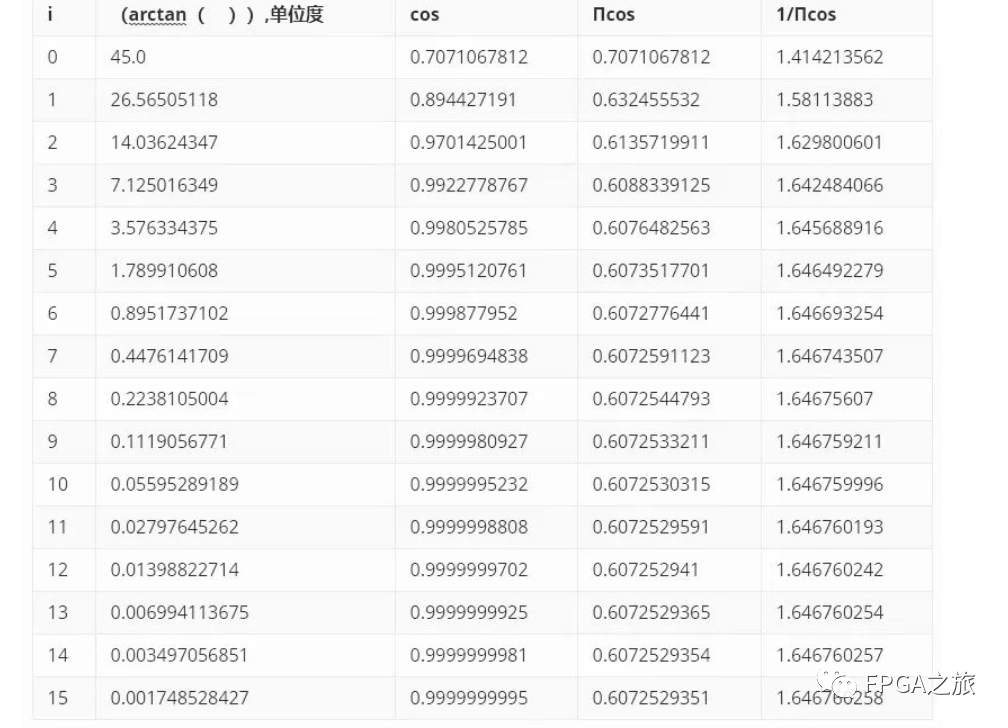
计算过程中 ,cosθi,只充当缩放因子,对旋转方向没有影响。可以先在软件中提取技术出来。每次旋转角度值 和 对应的 cos值如下。
3. arctan (x,y)和 sqr(x*2 + y * 2)算法实现
在求解sinθ 和 cosθ 的时候,知道,给定一个角度,按照上述方法就可以求解。现在将其反过来,给定sinθ 和 cosθ的值,也就是Pm的坐标(可能不在单位圆上,只是模值缩放了),现在只需要将其旋转到X轴的正半轴上,即Y = 0 ,X > 0的时候,所旋转过的角度值即arctan (x,y)。
然后P0的X坐标值即sqr(x*2 + y * 2)。旋转过程中,向量的模值是不会改变的,而Pm的模值就是sqr(x*2 + y * 2)。
三.Cordic算法实现
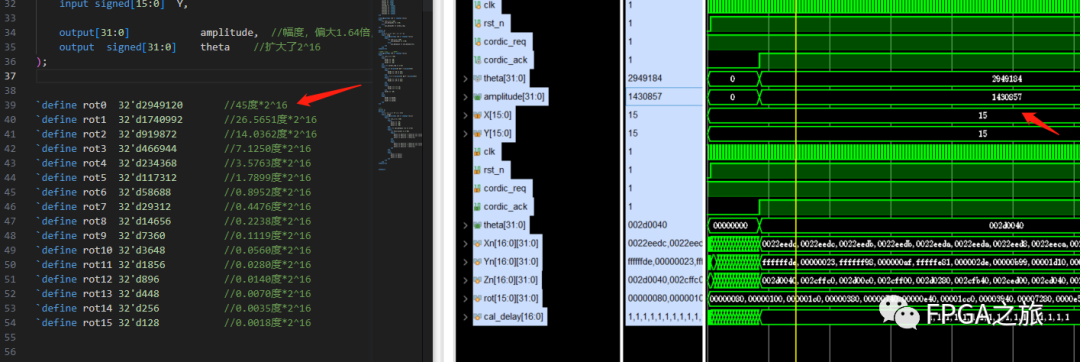
首先将上述角度值,存储到verilog中,需要进行扩大处理。由于tanθi = 1/2^i),所以对应的tanθ也是知道的。在相乘的时候,只需要将对应的数右移对应的位数即可
`define rot0 32'd2949120 //45度*2^16 `define rot1 32'd1740992 //26.5651度*2^16 `define rot2 32'd919872 //14.0362度*2^16 `define rot3 32'd466944 //7.1250度*2^16 `define rot4 32'd234368 //3.5763度*2^16 `define rot5 32'd117312 //1.7899度*2^16 `define rot6 32'd58688 //0.8952度*2^16 `define rot7 32'd29312 //0.4476度*2^16 `define rot8 32'd14656 //0.2238度*2^16 `define rot9 32'd7360 //0.1119度*2^16 `define rot10 32'd3648 //0.0560度*2^16 `define rot11 32'd1856 //0.0280度*2^16 `define rot12 32'd896 //0.0140度*2^16 `define rot13 32'd448 //0.0070度*2^16 `define rot14 32'd256 //0.0035度*2^16 `define rot15 32'd128 //0.0018度*2^16
然后就是迭代过程了,迭代16次足够了。最后的Zn和Xn就是想要结果。
//旋转 genvar i; generate for( i = 1 ;i < 17 ;i = i+1) begin: loop2 always@(posedge clk or negedge rst_n) begin if( rst_n == 1'b0) begin Xn[i] <= 'd0; Yn[i] <= 'd0; Zn[i] <= 'd0; end else if( cal_delay[i -1] == 1'b1) begin if( Yn[i-1][31] == 1'b0) begin Xn[i] <= Xn[i-1] + (Yn[i-1] >>> (i-1)); Yn[i] <= Yn[i-1] - (Xn[i-1] >>> (i-1)); Zn[i] <= Zn[i-1] + rot[i-1]; end else begin Xn[i] <= Xn[i-1] - (Yn[i-1] >>> (i-1)); Yn[i] <= Yn[i-1] + (Xn[i-1] >>> (i-1)); Zn[i] <= Zn[i-1] - rot[i-1]; end end else begin Xn[i] <= Xn[i]; Yn[i] <= Yn[i]; Zn[i] <= Zn[i]; end end end endgenerate
这里没有乘cosθ,最后的Xn会比真实值大1.64倍左右,所以还需要对其进行一个缩小操作,通过右移来近似实现。
assign cordic_ack = cal_delay[16]; assign theta = Zn[16]; assign amplitude = (Xn[16] >>> 1) + (Xn[16] >>> 3); ////幅度,偏大1.64倍,这里做了近似处理
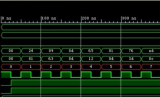
然后就是仿真了,给了X=Y=15,也就是角度为45度,幅值21.213,扩大65536倍为1,376,256。可以看到结果近似。
审核编辑:刘清
-
FPGA
+关注
关注
1629文章
21729浏览量
602977 -
存储器
+关注
关注
38文章
7484浏览量
163761 -
CORDIC算法
+关注
关注
0文章
17浏览量
9719 -
Verilog语言
+关注
关注
0文章
113浏览量
8224 -
姿态解算
+关注
关注
0文章
49浏览量
8259
原文标题:【经验分享】FPGA实现Cordic算法求解arctanθ
文章出处:【微信号:FPGA研究院,微信公众号:FPGA研究院】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
基于改进的CORDIC算法的FFT复乘及其FPGA实现
CORDIC 算法
请问能不能用CORDIC算法代替ROM表,用FPGA实现CORDIC算法来控制AD9910?
LabVIEW FPGA CORDIC IP核的arctan使用方法
FPGA设计中必须掌握的Cordic算法
高性能HPOR CORDIC算法及实现
利用CORDIC算法在FPGA中实现可参数化的FFT
基于CORDIC算法2FSK调制器的FPGA设计
双模式CORDIC算法的FPGA实现
cordic算法verilog实现(简单版)
基于FPGA的Cordic算法实现的设计与验证

如何使用FPGA实现CORDIC算法在跟踪环中的应用

基于流水线CORDIC算法通用数字调制器的FPGA实现方案






 工商网监
工商网监
评论