 中断控制器级联的类型有哪几种
中断控制器级联的类型有哪几种
中断控制器的级联
根据中断数量的不同,中断控制器可以级联,以此来满足需求。比如在 GIC 中断控制器之前都会连接 EINT中断控制器,或者其他中断控制器,对不同的中断分级管控。
中断控制器的级联有两种类型:

机器级别的级联,级联的初始化代码理所当然地位于板子的初始化代码中(arch/xxx/mach-xxx),因为只要是使用这个板子或SOC的设备,必然要使用这个子控制器。
设备级别的级联,因为该设备并不一定是系统的标配设备,所以中断控制器的级联操作应该在该设备的驱动程序中实现。
机器设备的级联,因为得益于事先已经知道子控制器的硬件连接信息,内核可以方便地为子控制器保留相应的 irq_desc 结构和 irq编号,处理起来相对简单。
设备级别的级联则不一样,驱动程序必须动态地决定组合设备中各个子设备的 irq 编号和 irq_desc
结构。我只讨论机器级别的级联,设备级别的关联可以使用同样的原理。
中断子系统架构

整个中断子系统的架构分为 4 层,最底层(第四层)为硬件,包括 CPU、中断控制器。第三层是 CPU的驱动和中断控制器的驱动,由芯片原厂负责。第二层是 Linux内核提供的通用中断处理模块,这一层存在的意义在于,希望用户在第一层写的驱动在移植的时候更方便,保持接口不变,不让用户直接使用芯片原厂的 API,而是 Linux的 API。第一层就是驱动工程师日常写的驱动啦。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
控制器
+关注
关注
113文章
16562浏览量
180300 -
Linux
+关注
关注
87文章
11372浏览量
211147 -
设备
+关注
关注
2文章
4580浏览量
71027 -
系统
+关注
关注
1文章
1022浏览量
21498
发布评论请先 登录
相关推荐
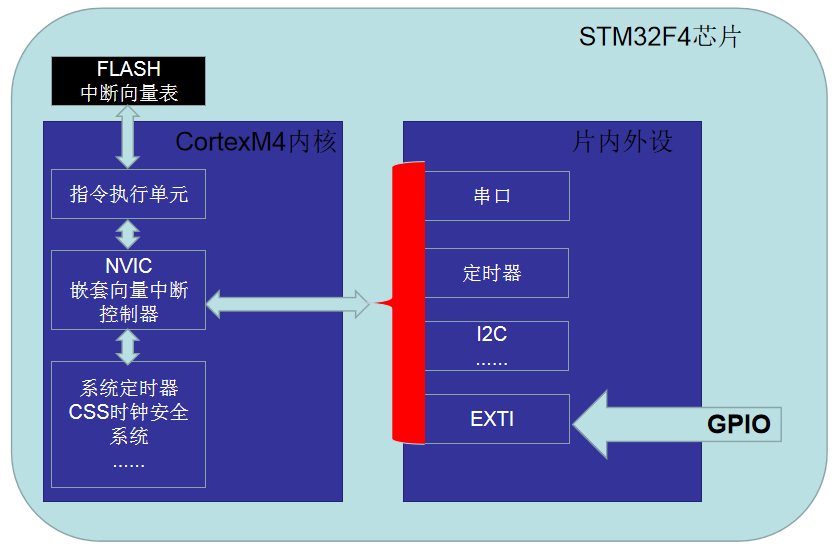
STM32外部中断控制器EXTI详解
什么是外部中断控制器,外部中断控制器在STM32芯片中处于什么位置,它的作用是什么,EXTI与GPIO的映射关系?





 工商网监
工商网监
评论