 【蓝桥杯嵌入式】第九章 PWM
【蓝桥杯嵌入式】第九章 PWM
第一节 原理与常识
PWM简称脉冲宽度调制,是利用微处理器的数字输出来对模拟电路进行控制的一种非常有效的技术,广泛应用在测量、通信、工控等方面。
PWM的频率是指在1秒钟内,信号从高电平到低电平再回到高电平的次数,也就是说1秒钟PWM有多少个周期,单位Hz。
PWM的周期T=1/f,T是周期,f是频率。如果频率为50Hz ,也就是说一个周期是20ms,那么1秒钟就有50次PWM周期。
占空比是一个脉冲周期内,高电平(脉宽)时间与整个周期时间的比例,单位是% (0%-100%)。
一个周期的长度,如下图所示。
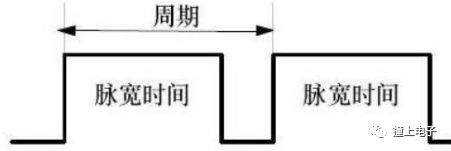
比方说,周期的时间是10ms,高电平(脉宽)时间是8ms,那么占空比是8/10= 80%,这就是占空比为80%的脉冲信号。
第二节硬件解读
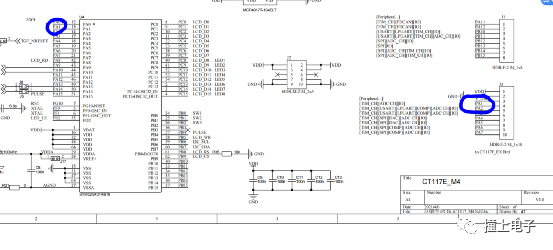
PWM是芯片STM32G431RBT6的内部资源,我们以PA1为例:
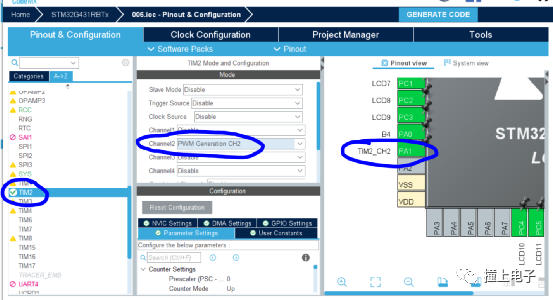
第三节CubeMX配置
第一步:将PA1配置为TIM2_CH2引脚,操作如下:
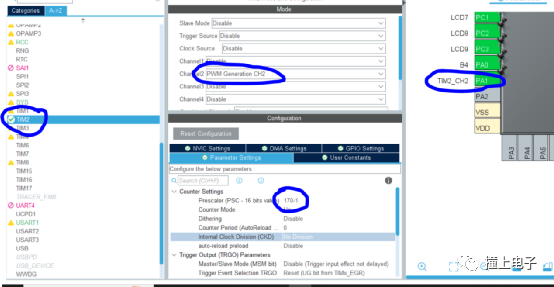
第二步:配置定时器参数,如下图:【注意:本教程STM32G431RBT6主频为170MHZ】
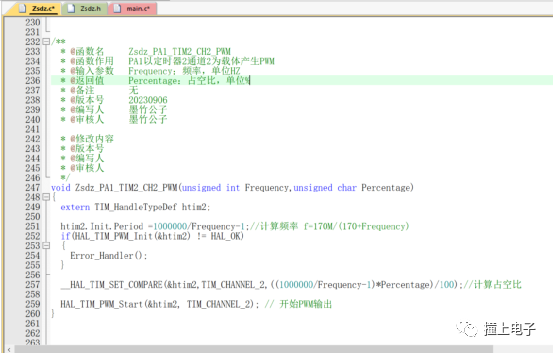
第四节MDK代码
第一步:封装PWM函数。如下图:
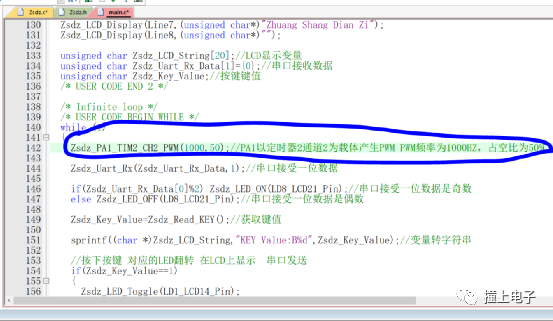
第二步:在mian函数中调用。
第五节 实验现象
现象:
1,上电8个LED闪烁一次,然后熄灭;
2,按下按键,对应的LED翻转一次;
3,LCD显示“LCD Test”,“Zhuang Shang Dian zi”等字符串,并显示按键键值;
4,串口以9600波特率发送键值;
5,当串口以9600波特率接收到最新的一位数据是偶数,LD8熄灭,反之常亮;
6,PA1以定时器2通道2为载体产生PWM,PWM频率为1000HZ,占空比为50%。
来源:撞上电子微信公众号
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
模拟电路
+关注
关注
125文章
1577浏览量
102954 -
嵌入式
+关注
关注
5096文章
19199浏览量
308294 -
PWM
+关注
关注
114文章
5203浏览量
215103 -
硬件
+关注
关注
11文章
3408浏览量
66535
发布评论请先 登录
相关推荐

【「从算法到电路—数字芯片算法的电路实现」阅读体验】+第九章sigma delta adc阅读与分享
本章介绍了sigma delta adc的硬件实现,ADC是嵌入式开发中绝对很基础重要的一个模块,而sigma delta adc有其特点,即位数可以做到很高,但是采样率相对会低一些,了解完书中硬件
发表于 11-20 13:58
九章云极DataCanvas公司与云南联通签署合作协议
近日,九章云极DataCanvas公司与中国联合网络通信有限公司云南省分公司(以下简称云南联通)在昆明正式签署《中国联通两亚“国际”智算中心联合运营协议》,标志着双方将共同推进建设云南省首个千P级

【北京迅为】i.mx8mm嵌入式linux开发指南第四篇 嵌入式Linux系统移植篇第六十九章uboot移植
【北京迅为】i.mx8mm嵌入式linux开发指南第四篇 嵌入式Linux系统移植篇第六十九章uboot移植
扬帆出海!九章云极DataCanvas公司惊艳亮相迪拜GITEX Global 2024
近日,第44届GITEXGLOBAL展会(GITEXGLOBAL2024)及全球领先的创业与投资盛会ExpandNorthStar2024在迪拜盛大启幕。九章云极DataCanvas公司惊艳亮相盛会

【「嵌入式Hypervisor:架构、原理与应用」阅读体验】+第三四章阅读报告
在深入阅读了《嵌入式Hypervisor:架构、原理与应用》的第三、四章后,我对嵌入式Hypervisor的设计与实现技术有了更为详尽和系统的理解。以下是我对这两章内容的阅读报告:
发表于 10-09 18:29
九章云极DataCanvas公司「算力包」产品璀璨亮相2024中国算力大会!
九章云极DataCanvas公司技术专家向与会者详细介绍算力包的产品能力和创新模式,收获行业伙伴的高度认可。算力作为AI时代的数字能源,将在行业应用和技术创新互相驱动下,迈入“算力普惠”的终极生态,AI应用也将迎来爆发式的繁荣。

《DNK210使用指南 -CanMV版 V1.0》第九章 打印输出实验
第九章 打印输出实验 本章节为实验篇的第一章,将通过打印输出实验为后续实验中的交互打下基础。通过本章的学习,读者将学习到CanMV中print()函数的使用。本章分为如下几个小节:9.1 打印输出
发表于 09-28 14:51
九章云极DataCanvas算力包正式发布
在数字化转型的浪潮中,九章云极DataCanvas再次引领创新,正式推出全新算力产品——“算力包”。这一创新力作,以用户为核心,颠覆传统算力服务模式,采用“按需购买、即买即用”的灵活方式,让算力资源触手可及。
智算筑基,九章云极DataCanvas公司闪耀2024年服贸会
9月12日,2024年中国国际服务贸易交易会在北京隆重开幕,九章云极DataCanvas公司携AI智算产品系列深度参展本届服贸会,为观众奉上技术与应用深度融合的参展盛宴。

【「ARM MCU嵌入式开发 | 基于国产GD32F10x芯片」阅读体验】+书籍整体概况
SPI接口,通过使用软件模拟方式读写W25Qxx案例、硬件SPI操作W25Q32。第九章介绍CAN总线,CAT实验介绍。第十章介绍模拟转换器即ADC外设应用。第十一章介绍DMA直接数据存取内容。
第十二章
发表于 08-25 22:48
学习hypervisor嵌入式产品安全设计
第一部分(第1~2章)介绍Hypervisor基础,涵盖虚拟化技术与实现、主流的嵌入式Hypervisor产品,以及基于分离内核的嵌入式Hypervisor等内容。第二部分(第3~12章
发表于 08-25 09:11
第九章-PID整定方法 STM32PID驱动编码器 STM32PID控制电机转速
控制、PID循迹、PID跟随、遥控、避障、PID角度控制、视觉控制、电磁循迹、RTOS等功能。
# 第九章-PID整定方法
## 9.1-调整合适的采样周期和PID调参方法
正如

九章云极DataCanvas公司入选北京市通用人工智能产业创新伙伴计划
作为北京市标杆人工智能企业,九章云极DataCanvas公司将持续发挥产业优势,继续坚持将自主创新的AI技术注入产业,以大模型应用为终极服务目标,通过包括大模型在内的人工智能基础软件,为政府和行业用户提供国际领先的AI服务,加速数字经济跨越发展!

九章云极DataCanvas公司强势入选IDC生成式AI图谱7大核心板块
九章云极DataCanvas公司把握既有前沿技术和服务经验,将AI软件以核心操作系统的形式深度融入智算中心体系,同时积极与上下游生态伙伴合作在全国范围布局智算中心建设和运营。






 工商网监
工商网监
评论