 蘑菇车联论文入选IEEE 轨迹预测模型可提高轨迹预测的泛化能力
蘑菇车联论文入选IEEE 轨迹预测模型可提高轨迹预测的泛化能力
近日,蘑菇车联提交的轨迹预测论文被IEEE Transactions on Intelligent Vehicles(IEEE TIV)正式录用。这是蘑菇车联轨迹预测算法今年第二次获得顶级学术期刊IEEE认可。 IEEE TIV是全世界第一份智能车专业学术期刊,目前已跻身《期刊引用报告》(Journal Citation Reports, JCR)Q1区,2023年,该期刊位列IEEE所有期刊第六位。与此同时,IEEE TIV 在控制与优化领域121种期刊中排名第3位;在汽车工程领域115种期刊中排名第6。
【蘑菇车联论文入选IEEE】 本次由蘑菇车联与复旦大学类脑人工智能科学与技术研究院共同撰写的论文提出,轨迹预测模型Lane Transformer++可以提高轨迹预测的泛化能力,让自动驾驶车辆更快适应新环境。
轨迹预测对自动驾驶车辆以及自行车、行人等交通参与者的安全至关重要,近年来,许多轨迹预测模型被提出,但大多数模型都没有考虑泛化能力。如果泛化能力不够,同时叠加速度、道路结构和交通规则的差异,就会导致模型偏差及预测性能下降。这就意味着,一辆自动驾驶汽车能在武汉的街道上安全行驶,到了北京可能就会失去“准头”。
在自动驾驶大规模落地的过程中,自动驾驶车辆不可能进入一座新城市就更改一次预测模型,也因此,轨迹预测模型的领域泛化成为亟需解决的关键问题。
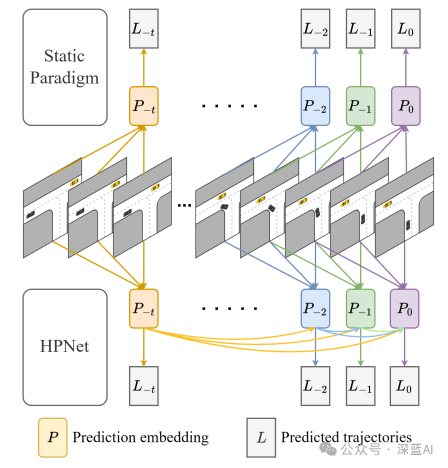
蘑菇车联将领域泛化的难点归因于两个要素:速度和环境,“Lane Transformer++”的两个加号分别代表速度问题和环境问题。
为了解决速度差异对轨迹预测模型带来的影响,蘑菇车联基于模型轨迹生成多层感知的速度细化模块,用以减轻速度偏差;针对环境带来的变量,蘑菇车联利用自蒸馏技术进一步提高模型对陌生环境的适应能力。
在Argoverse和INTERACTION数据集上的全面评估表明,Lane Transformer++能够显著提高预测性能,特别是在交互数据集上,Lane Transformer++性能最为领先。此外,该模型还可以作为大多数现有轨迹预测模型的插件,提高轨迹预测模型的整体泛化能力。
蘑菇车联汇聚了自动驾驶领域顶尖的技术人才,未来将持续在前沿技术领域不断突破,提升技术核心竞争力,助力自动驾驶技术规模化应用。
审核编辑:彭菁
-
IEEE
+关注
关注
7文章
387浏览量
47259 -
人工智能
+关注
关注
1798文章
47956浏览量
241098 -
模型
+关注
关注
1文章
3392浏览量
49351 -
蘑菇车联
+关注
关注
0文章
25浏览量
342
原文标题:再获IEEE认可,蘑菇车联轨迹预测模型行业领先
文章出处:【微信号:moguzhixingmogo,微信公众号:蘑菇车联】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
信道预测模型在数据通信中的作用
运动控制中如何实现路径轨迹预测
园区封闭化管理之人员和车辆定位及轨迹追踪
人员轨迹分析算法有哪些?
焊接机器人拖拽轨迹怎么设置

人员定位及轨迹管理技术原理及应用领域





 工商网监
工商网监
评论