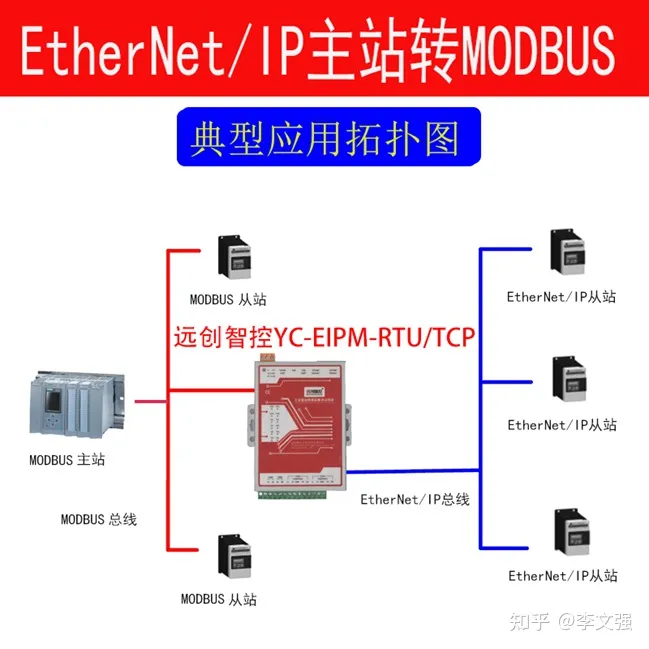
 EthernetIP 转MODBUS RTU协议网关连接FANUC机器人作为EthernetIP通信从站
EthernetIP 转MODBUS RTU协议网关连接FANUC机器人作为EthernetIP通信从站
远创智控YC-EIPM-RTU网关产品是一款高效的数据采集工具,它可以通过各种数据接口与工业领域的仪表、PLC、计量设备等产品连接,实时采集这些设备中的运行数据、状态数据等信息。采集到的数据经过整合和运算等操作后,可以被传输到其他设备或者云平台。网关可采集设备数据采集的数据可转换成转发。网关接口有232、485、网口、4G可选,用户可以根据实际采集数据的个数选择相应的网关,节省成本。其中,EthernetIP协议一般用于采集机器人,控制器等设备的数据,实现数据采集,你还在等什么?
以下是连接FANUC机器人作为EthernetIP通信从站的配置方法
网关采集 EthernetIP 数据
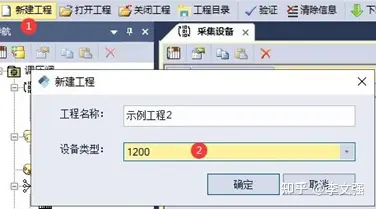
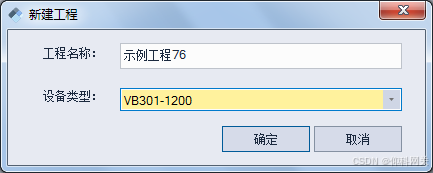
1,安装软件。打开软件后,点击新建工程,设备类型选择实际网关的型号。
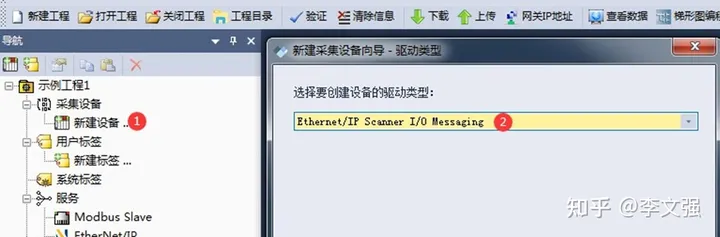
2,点击“新建设备”,驱动类型选择如下
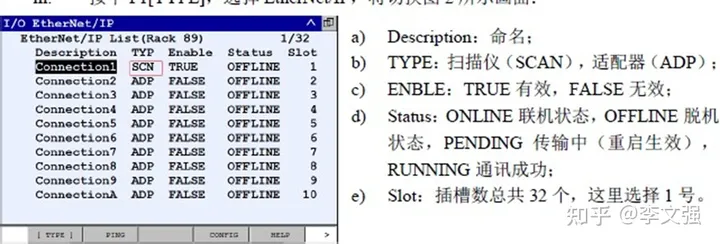
3,首先确认机器人是否加装了 ETherNet/IP ADAPTER 功能,选择示教器上的[Menu]键一在第5 项[/]菜单中寻找[EtherNet/IP]功能,如图 1 所示,进入以后,确认 TYP(类型)项可以更改为 ADP,如图2所示如果有则说明已安装EtherNet/IP ADAPTER 功能,如若没有则需要联系FANUC。

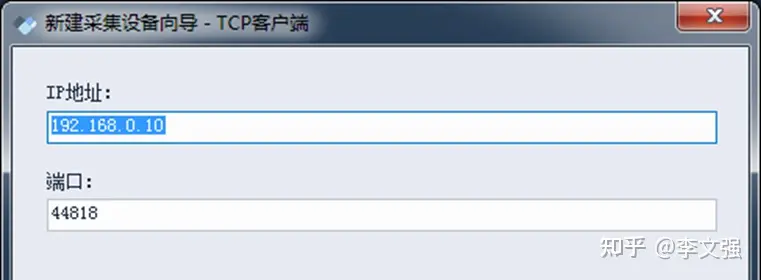
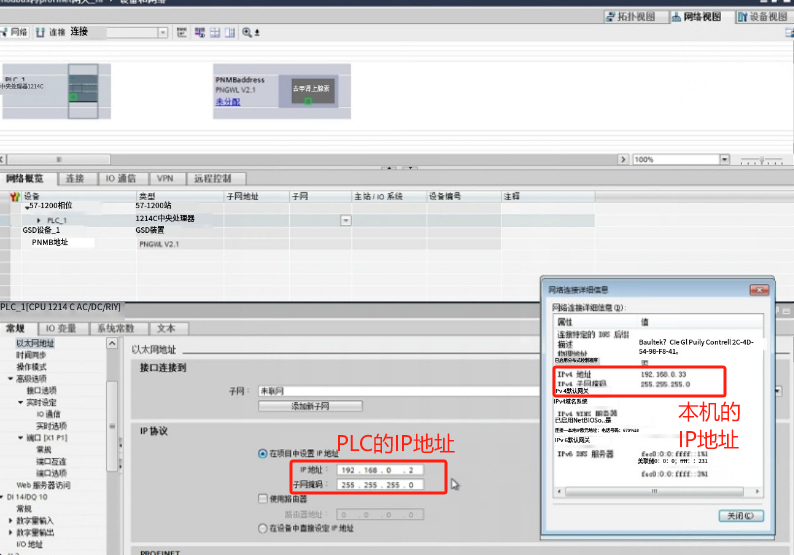
4,输入被采集设备的 IP 地址和端口号,端口号一般默认是 44818
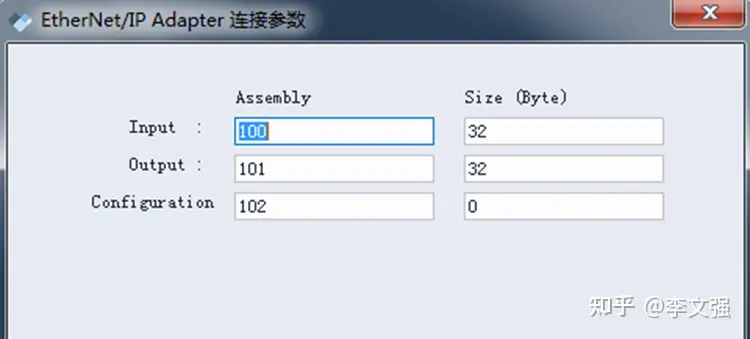
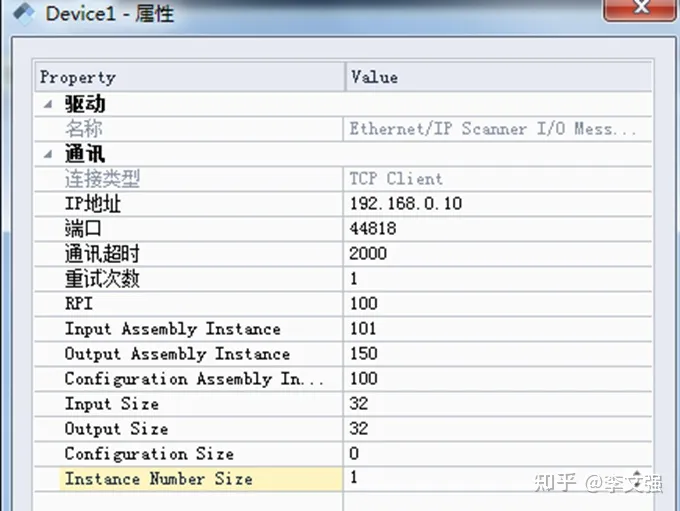
5,按照被采集数据的设备配置网关的输入块、输出块的参数。这些参数和被采集设备保持一致。这些参数在被采集设备上查看。
6, 添加要采集的数据。需要知道这个点位的地址和数据类型,填写到如下的选项中。

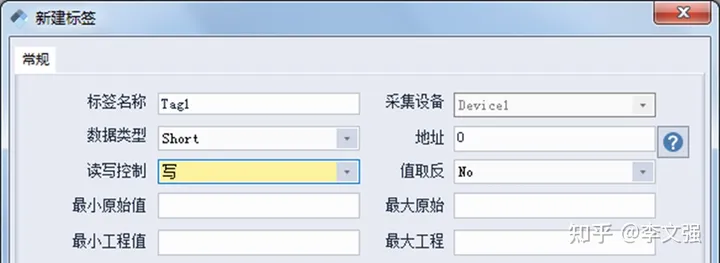
7, 写数据到 EIP 设备的配置如下,读写类型设置成“写”
8,配置完成后点击菜单“下载”,把工程下载到网关里。
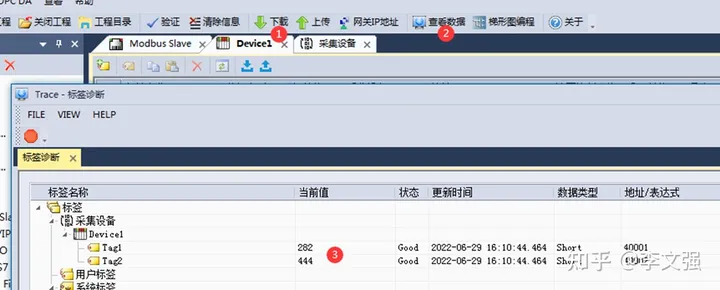
点击菜单“查看数据”,查看网关采集到的数据。对比一下当前值,“状态”显示 Good,更新时间为当前时间就代表采集到了数据。
用 Modbus 协议转发数据
1.点击菜单“服务”-“Modbus Slave”,把 modbus rtu 中的启用设置成 Yes

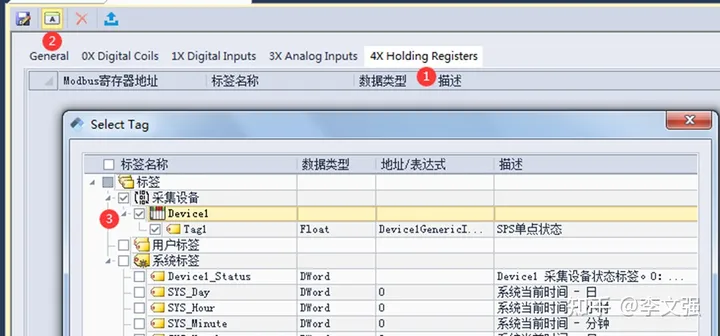
2,把要转发的数据添加到对应的寄存器下。
3,配置完成后,点击“下载”,把工程下载到网关中。在电脑上就可以使用 modbus 的测试软件读取网关里的数据了。
4,从设备的的 EDS 文件获取参数信息
有些 EIP 的从站设备提供了 EDS 文件,可以从EDS 文件中获取点位信息。这些信息是需要填写到网关中。
一般 EIP 设备上也有对应的显示和配置。请参考设备的使用说明书,先把 EIP 设备设置成 EIP 的从站,并且启动连接通道。
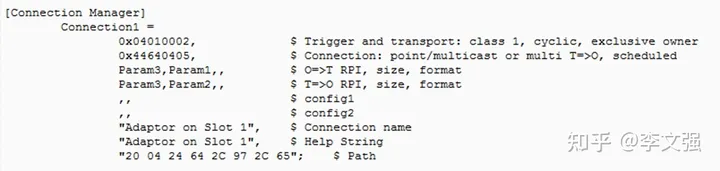
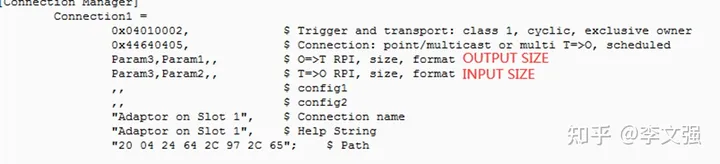
5,打开设备的 eds 文件,找到如下格式的内容。定位到 [Connection Manager],找到 Connection 的
Path,类似 "20 04 24 64 2C 97 2C 65"; $ Path。定位 24 2C 2C, 24 后面的是Configruation(100), 2C 后面分别是 Output(150), Input(101)。Instance 的值是 1。
6,举例:20 04 24 01 2C 78 2C 82:Output(120), Input(130)
7,如果 Path 类似"20 04 25 00 64 00 2D 00 C6 00 2D 00 C7 00"; 则定位 25 00, 2D 00 2D 00, 后
面的 2byte 是 Instance,这种情况 vs 中 Instance Number Size 需配置成 2。另外,常用的Input/Ouput/Configuration Instance 范围 0-255,1 个字节,但有些从站Instance 范围用 0-
65535,需要 2 个字节。
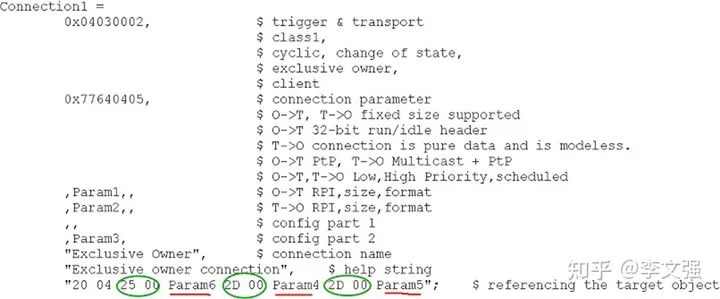
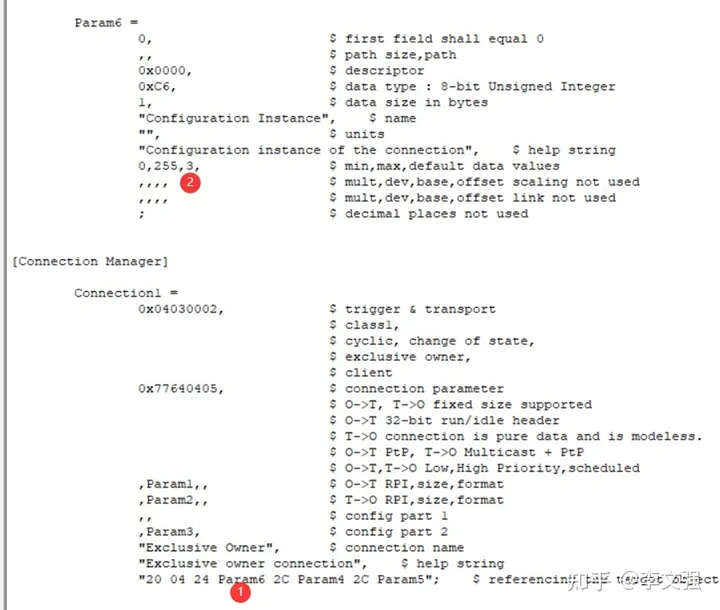
8,一些 EIP 设备是用下面的类似的格式定义了 Instance Number Size 的值。下图中的 Param6 定义了输入举例(Input Instance)的值 3。
9,Configruation Size 一般填写 0
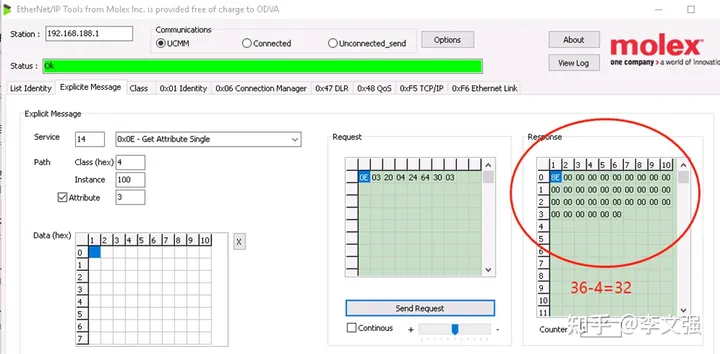
输入输出的长度(size)可以从 EIP 的设备的显示面板上查看(优先从面板上查看)。也可以用 EIP 工具来查看
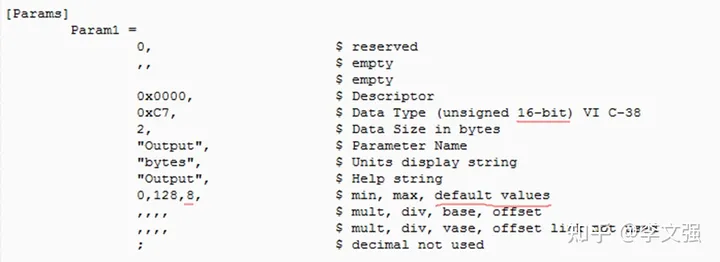
10.输入输出的长度(size)也可以 EDS 文件中查看,
找到 Param1 param2 的定义,如下可知 size 的值是 2*8=16 个字节
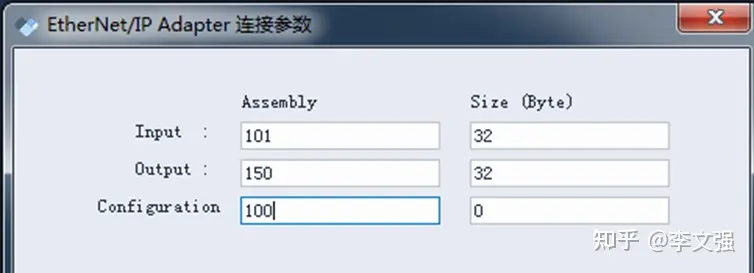
获取到相关的值后,网关中的配置如下
审核编辑 黄宇
-
机器人
+关注
关注
211文章
28524浏览量
207568 -
数据采集
+关注
关注
39文章
6180浏览量
113791 -
MODBUS
+关注
关注
28文章
1812浏览量
77104 -
EDS
+关注
关注
0文章
96浏览量
11540 -
协议网关
+关注
关注
0文章
282浏览量
3630
发布评论请先 登录
相关推荐
开疆智能Profinet转EthernetIP从网关连接ABB机器人做EtherNet主配置案例
协议变形记!ETHERNETIP转PROFIENT网关与HEndress+Hauser流量计

EtherNetIP转Profinet网关连接发那科机器人配置实例解析

EtherCAT转Modbus RTU总线协议转换网关
EthernetIP IO从站设备数据 转profinet IO项目案例

Modbus RTU转CC-link协议网关(Modbus RTU转CC-link)

Modbus RTU转CC-Link协议网关(CC-Link转Modbus RTU)

EtherNet/IP转Modbus-RTU主站协议网关(JM-EIP-RTU)

EtherCAT转Modbus RTU协议网关(YC-ECT-RTU)

Profinet IO从站数据 转EthernetIP项目案例
Profibus DP主站转Modbus网关连接智能化电表通讯


Modbus RTU转PROFINET协议转换网关 HT1S-PNS485-S10
Modbus转Profinet网关连接LED大屏与PLC通讯





 工商网监
工商网监
评论