 CODESYS可视化案例—双轴位置同步控制
CODESYS可视化案例—双轴位置同步控制
在运动控制过程中,有时需要控制两个运动轴在某个特定位置进行调整,最终主从轴在另外一个特定的位置达到运动的同步。
这样的控制如果采用机械机构来实现将是较为复杂的,用程序则相对比较容易,特别是集成了相关运动控制模块的系统,例如Codesys,编程实现这些运动控制功能是非常简单的。
Codesys中的常用运动控制和管理模块
MC_Power使能、MC_Home回零、MC_Stop停机、MC_Halt暂停、MC_Jog点动、MC_MoveVelocity匀速运动、MC_MoveAbsolute运动到绝对位置(角度)、MC_MoveRelative运动到相对位置(相对当前位置的角度值)、MC_GearIn以电子齿轮方式从轴耦合到主轴、MC_GearOut解耦电子齿轮、MC_GearInPos在特定位置以电子齿轮方式从轴耦合到主轴......
在此就不一一列举。可以到库管理器中查询运动控制指令及其参数和用法。
本例主要演示 双轴位置同步控制 :
变量定义如下:
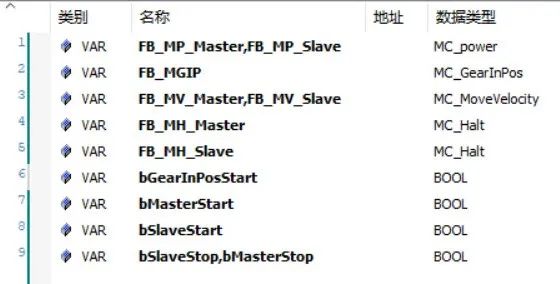
程序如下:

变量定义小技巧:
可以把同类型变量定义在一行当中,以","隔开即可。这样可以减少代码行数,提升阅读效率。但如此定义的变量将不能通过“拖曳方式”添加到梯形图中。
变量监测小技巧:
在仿真条件下,当可视化界面中的按钮点击时,如果按钮行为是tapper形式的,即类似于实体按钮,那么鼠标松开后关联逻辑变量会恢复到初始值,导致难以监测相关逻辑变量的变化。
此时可以将可视化界面拖动到一边,使得点击按钮时,PLC程序中变量不会被遮挡,这样就可以观察到变量变化与鼠标动作的关联了。
下面是双轴速度位置控制的仿真过程视频,其中两轴可停止在任意位置,然后启动耦合,当主轴运动到角度30°时会自动进行齿轮位置同步调整,在50°时进入电子齿轮位置同步,主从两轴实现齿轮耦合,同步运动。
另外由于其中bGearInPosStart变量由于模块的需要,需要一直保持true,才能保证主从轴正常耦合,因此对应的MGIP按钮行为需要设置为默认的toggler方式,也就是类似于开关,按下后会自锁。
-
plc
+关注
关注
5012文章
13307浏览量
463651 -
仿真器
+关注
关注
14文章
1018浏览量
83770 -
运动控制
+关注
关注
4文章
581浏览量
32876 -
CoDeSys
+关注
关注
10文章
39浏览量
18672 -
同步控制器
+关注
关注
0文章
10浏览量
7465
发布评论请先 登录
相关推荐
什么是大屏数据可视化?特点有哪些?
如何找到适合的大屏数据可视化系统
智慧能源可视化监管平台——助力可视化能源数据管理

智慧楼宇可视化的优点
大屏数据可视化 开源

如何实现园区大屏可视化?

态势数据可视化技术有哪些
智慧大屏是如何实现数据可视化的?

大屏数据可视化的作用和意义
三维可视化数据大屏的设计原理和技巧
数据可视化:企业数字化建设效果的呈现
态势数据可视化技术有哪些
可视化全程追溯,可视化资产管理系统





 工商网监
工商网监
评论