 ECU如何传输数据?
ECU如何传输数据?
前言
前面已经介绍了几种总线协议,那现在如果在汽车上实际应用一种总线协议来通讯的话,你会选择哪一种呢?
答案是 都不行
因为在汽车中许多系统都需要实时控制,而且数据必须可靠,即使面对面对恶劣环境也要正常运行
如何解决这个问题呢?就要看CAN总线了
ECU如何传输数据?
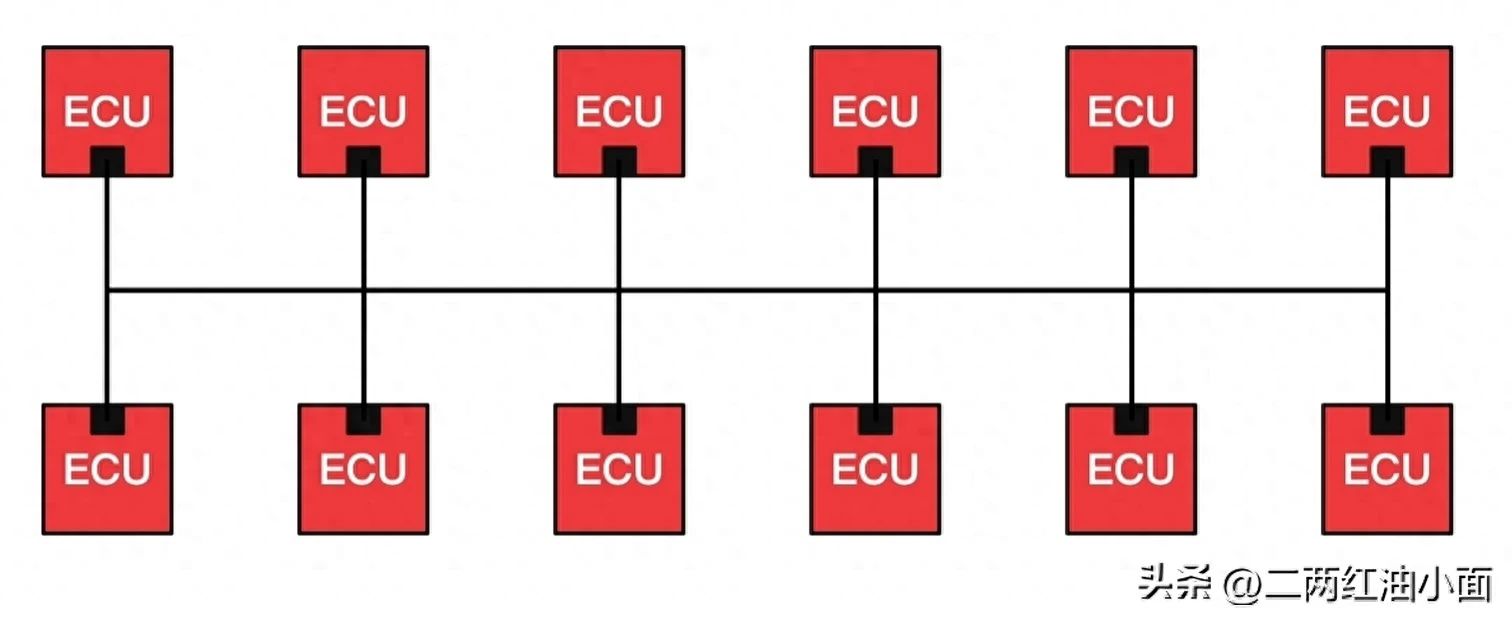
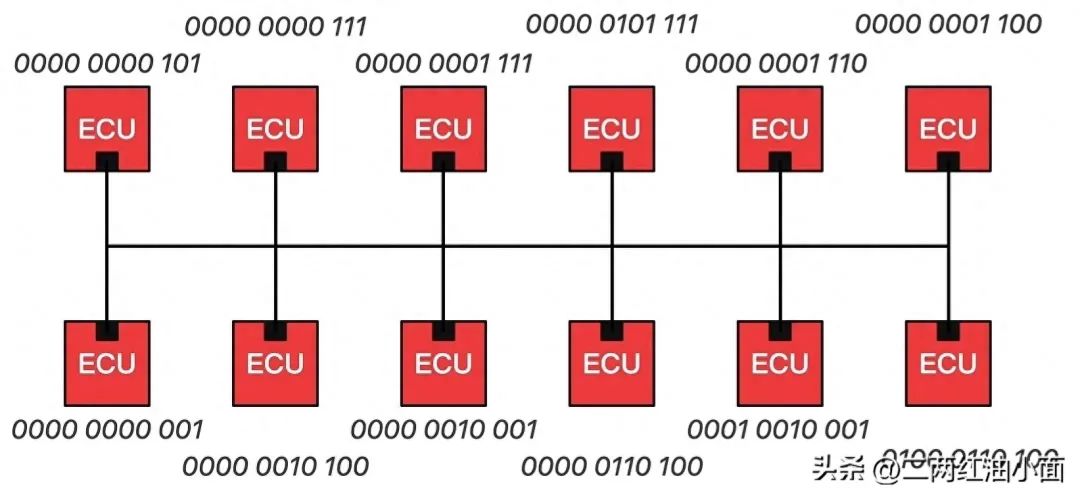
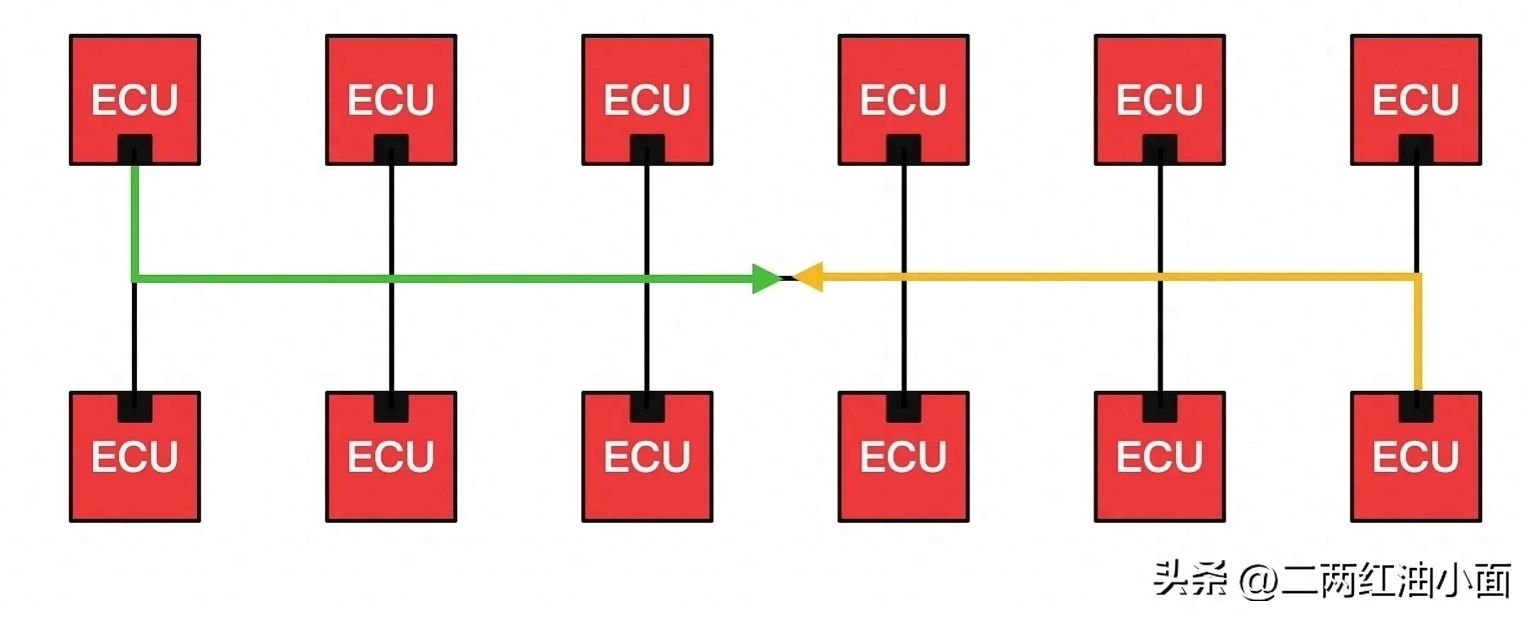
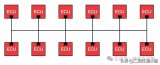
现在将车上的每个设备用一条总线连接起来
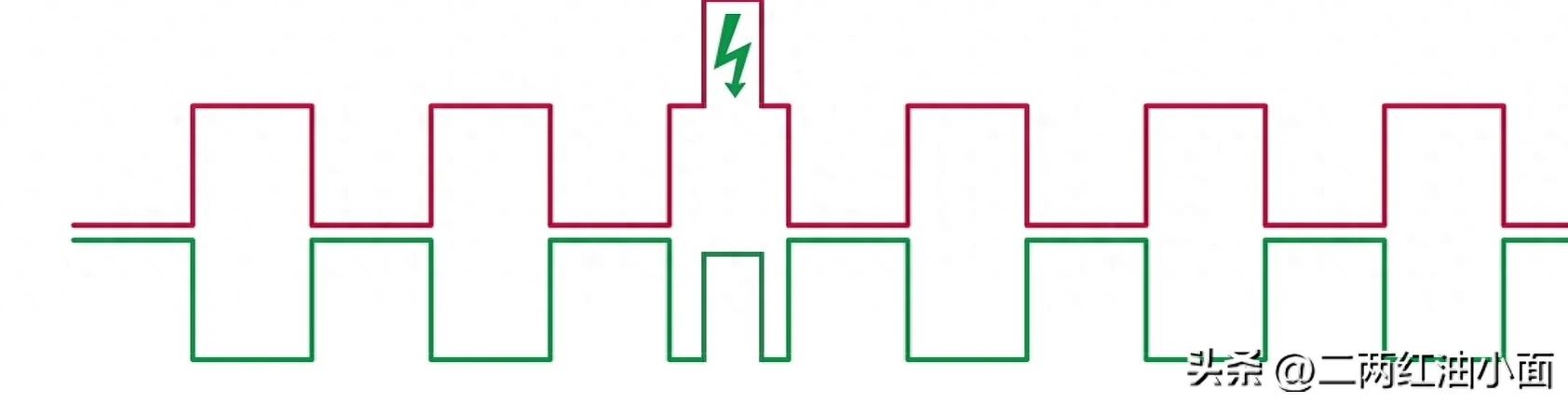
要想CAN通讯,就必须要专门的CAN收发器,经过CAN收发器,普通信号就会转化成差分信号(差分信号由两根线表示)
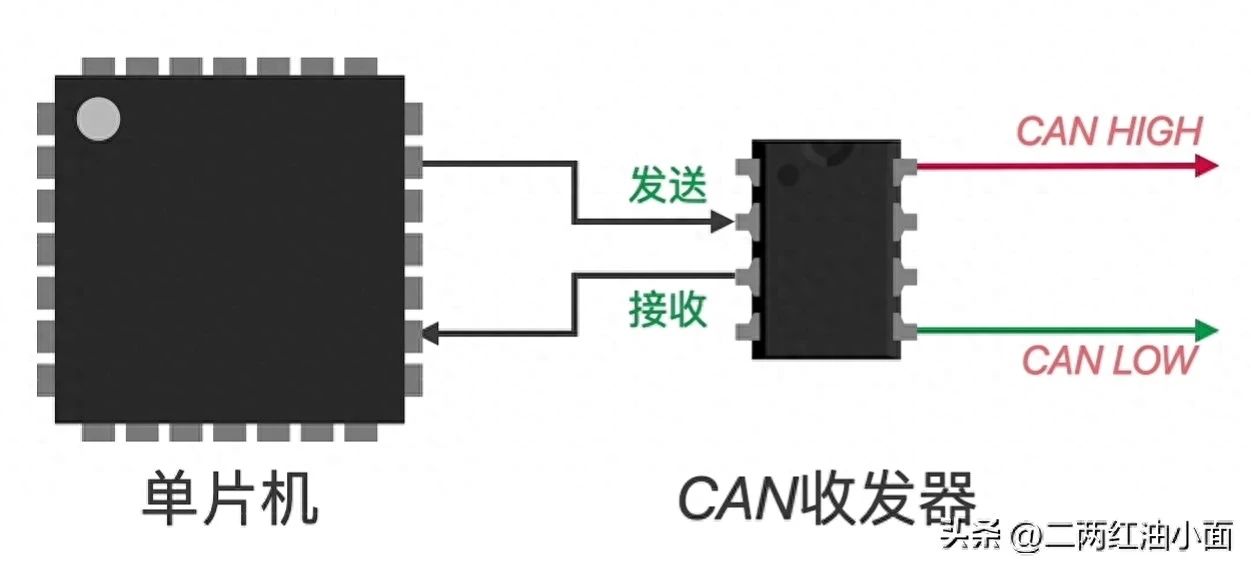
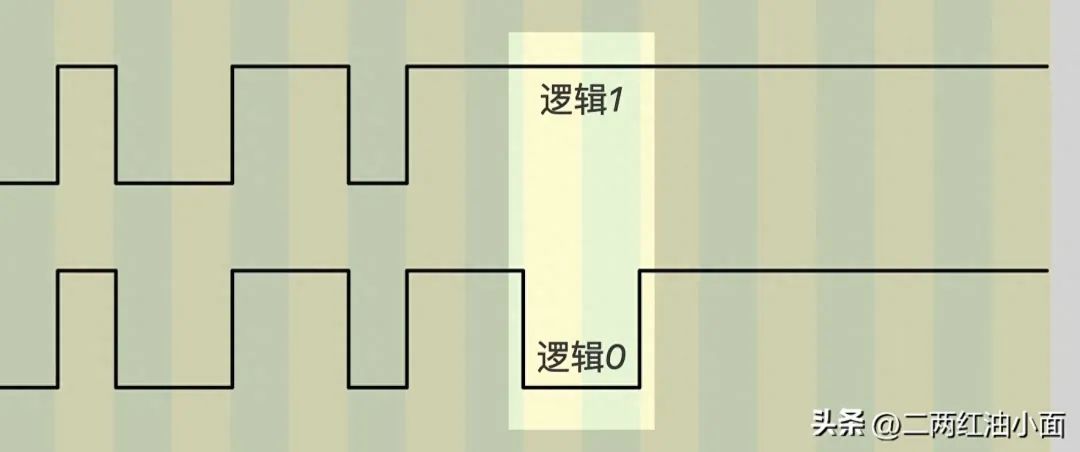
如果输入0,CAN收发器的两根线分别输出3.5V和1.5V(压差为2V)
如果输入1,CAN收发器的两根线都输出2.5V(压差为0V)
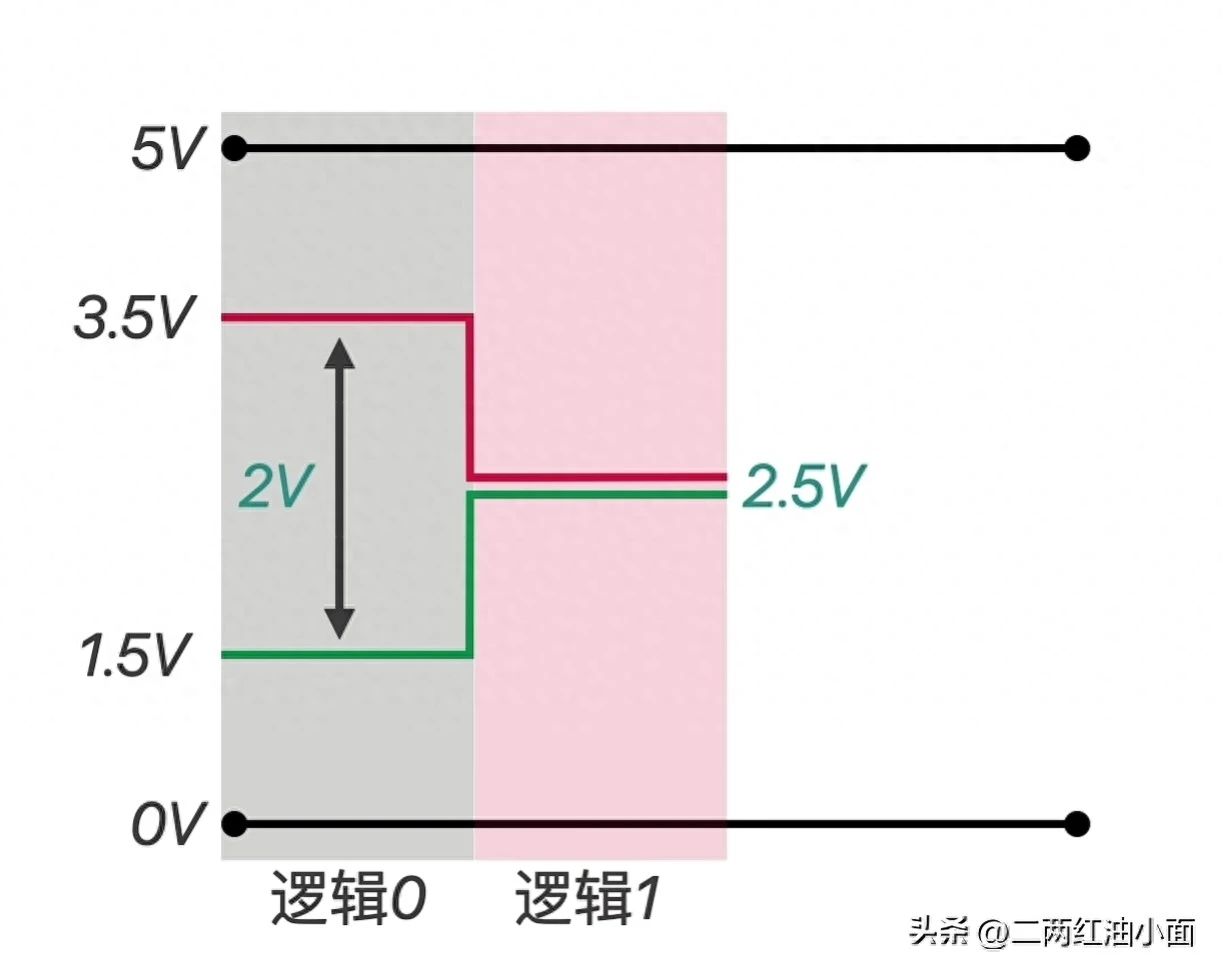
为什么要这样表示数据?
想象一下,如果这条线是0V,受到了干扰,电压就会波动
如果是两条线缠绕在一起,用差分信号来表示数据的话,即使受到了干扰,也是两条线一起受到干扰,依旧存在压差
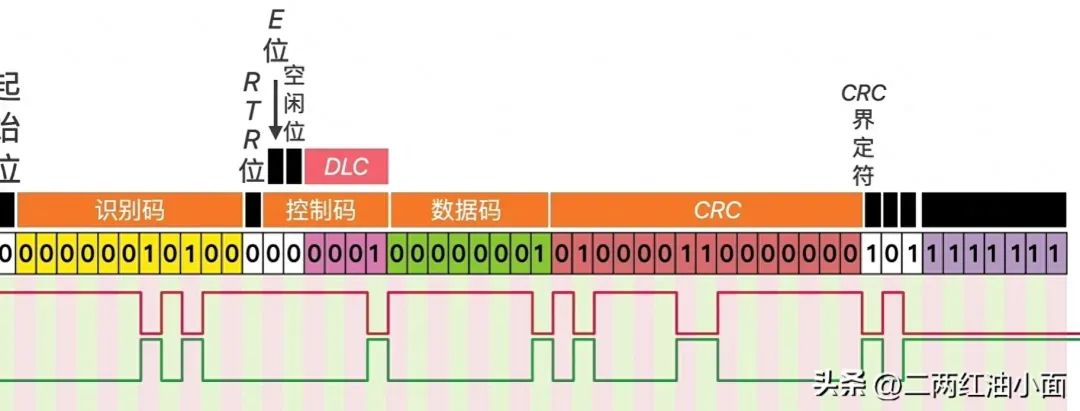
CAN数据格式
这是一帧完整的数据
最开始是起始位(始终为0)
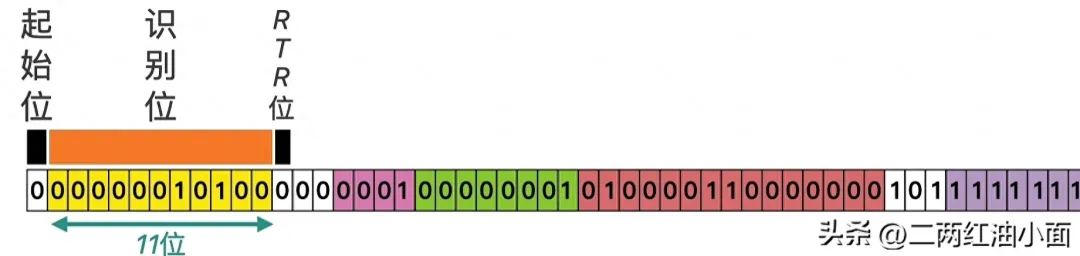
然后是11位的识别码
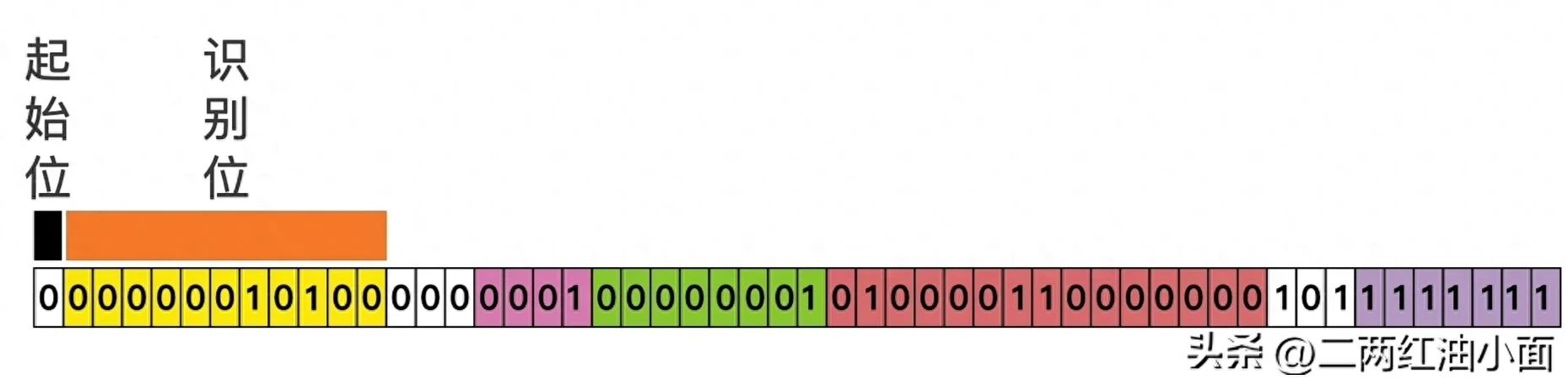
每一个设备都有唯一的11位识别码
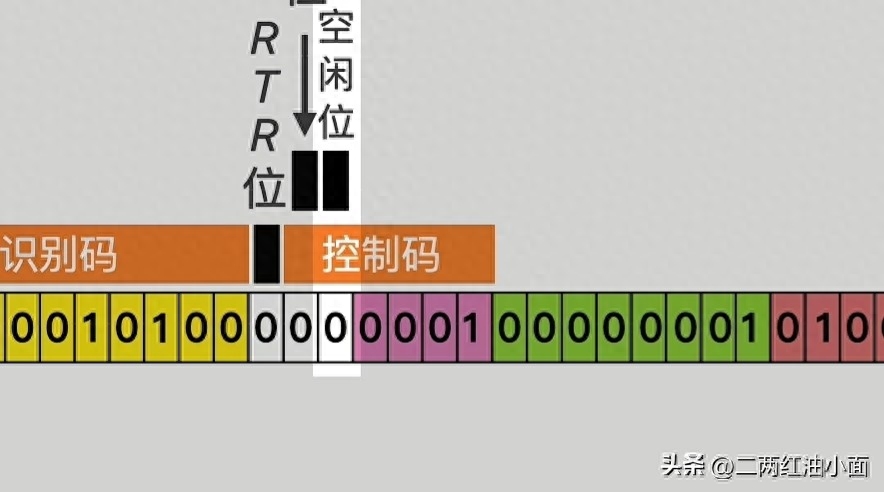
紧接着是RTR位用来区分数据帧(0)或远程请求帧(1)
接下来是6位控制码
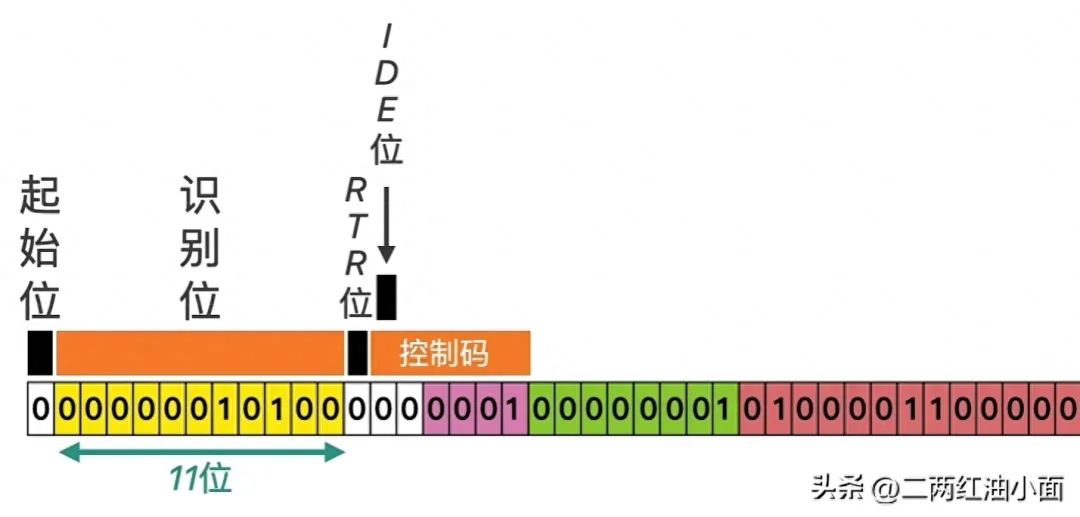
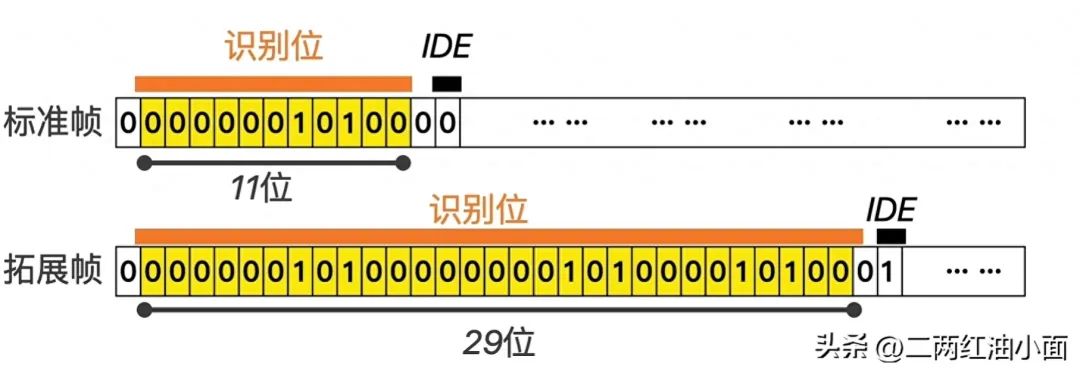
其中第一位的IDE位是用来区分是标准帧还是拓展帧(标准帧有11位的识别码,IDE位为0;而拓展码有29位的识别码,IDE位为1)
下面是预留位,它是逻辑0
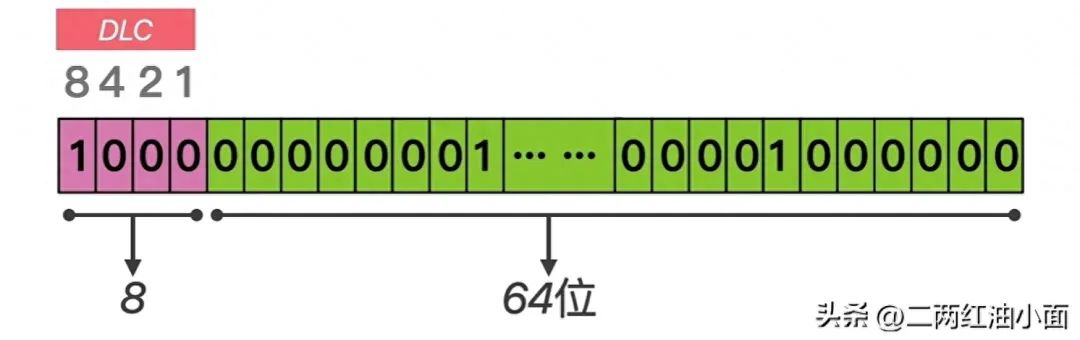
剩下的4位为DLC位,表示数据长度
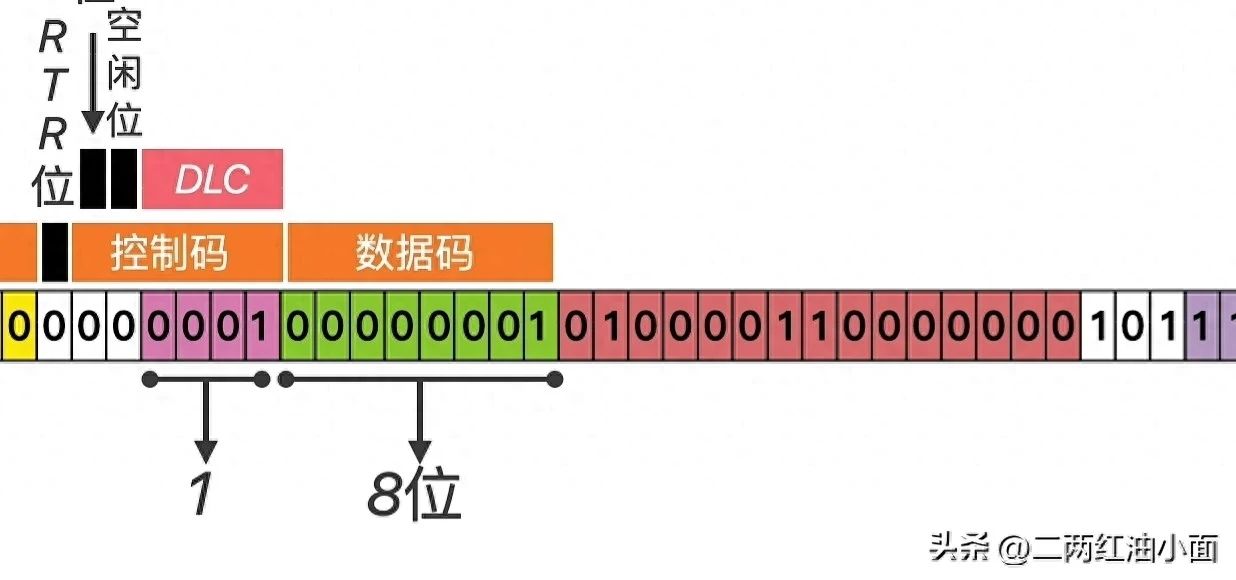
每一个数值对应每一个字节(比如如图数值为8,对应数据长度为8个字节)
接下来是16位的CRC循环冗余校验位,它是为了确保收到的数据的准确性
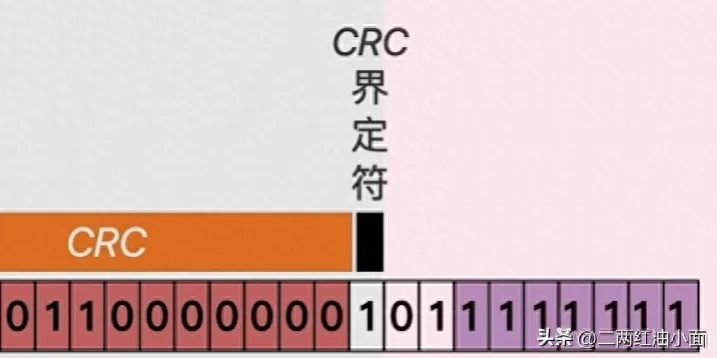
首先是15位CRC校验位,如果和接收到的CRC校验位不一致,就会重新再重发一次
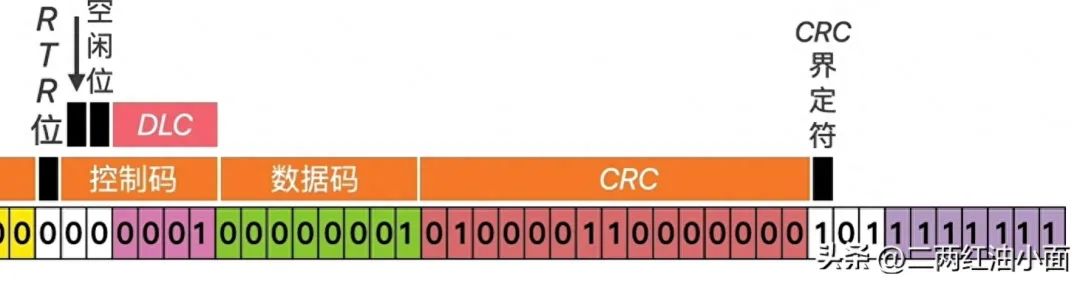
最后是CRC界定位,目的是为了与后面的数据区分开来
然后是2位ACK码
第一位是ACK确认槽(发送端是1,接收端就是0)用来表示应答
第2位是ACK界定位(始终为1),目的也是为了和后面的数据区分开来,
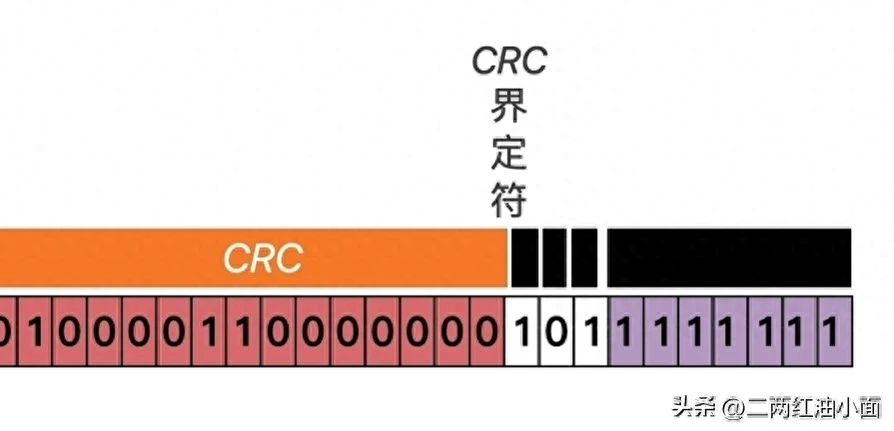
最后是7位结束位(时钟为1)
如果用用差分信号表示,电平是这样的,如图所示
如果此时总线上同时有2个设备发出控制信号,究竟优先执行哪一个设备的信号呢?
这就得看11位的识别码了,它不仅指定了哪个设备,还表示了优先级
当总线同时为1或0,总线会被置为0(即优先执行电平0)
总结
了解完了CAN总线,或许会有一个疑惑点?
CAN总线和RS485是不是有点相似,对吧?
虽然的确有些相似之处,但CAN总线是专门用于汽车领域的,就比如数据可靠性,CAN总线检测到数据不一致,就会重新发送,而485就发一次,不管是不是正确的数据
相对485不止一个优点,碍于文字,就不过多叙述了
-
收发器
+关注
关注
10文章
3390浏览量
105846 -
CAN
+关注
关注
57文章
2714浏览量
463328 -
总线
+关注
关注
10文章
2864浏览量
87972
原文标题:总结
文章出处:【微信号:LinuxHub,微信公众号:Linux爱好者】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐

CANoe:网络和ECU开发、测试和分析的专业工具
ECU的静态电流
ECU的原理是什么?
车载ECU的Bootloader实现方法概述
汽车中的ECU, VCU, MCU, HCU分别是什么
汽车ECU分类
CSEc MASTER ECU KEY更新错误的原因?
汽车ECU是什么?ECU是如何工作的
ECU刷写流程之压缩刷写技术解析

ECU故障诊断工具 如何选择合适的ECU
ECU和OBD的区别
理解ECU数据流的分析方法
解析CAN总线





 工商网监
工商网监
评论