 SV线程的使用和控制
SV线程的使用和控制
1、线程的使用
1.1程序和模块
• module (模块)作为SV从Verilog继承过来的概念,自然地保持了它的特点除了作为RTL模型的外壳包装和实现硬件行为, 在更高层的集成层面,模块之间也需要通信和同步。
• 对于硬件的过程块,它们之间的通信可理解为不同逻辑/时序块之间的通信或者同步,是通过信号的变化来完成的。
• 从硬件实现的角度来看,Verilog通过always,initial过程语句块和信号数据连接实现进程间通信。
• 我们可以将不同的module作为独立的程序块,他们之间的同步通过信号的变化(event触发)、等待特定事件(时钟周期)或者时间(固定延时)来完成。
如果按照软件的思维理解硬件仿真,仿真中的各个模块首先是独立运行的线程(thread)。
模块(线程)在仿真一开始便并行执行, 除了每个线程会依照自身内部产生的事件来触发过程语句块之外, 也同时依靠相邻模块间的信号变化来完成模块之间的线程同步。
• 线程即独立运行的程序。
• 线程需要被触发, 可以结束或者不结束。
• 在module中的initial和always,都可以看做独立的线程,它们会在仿真0时刻开始,而选择结束或者不结束。
• 硬件模型中由于都是always语句块 , 所以可以看成是多个独立运行的线程, 而这些线程会一直占用仿真资源, 因为它们并不会结束。
• 软件测试平台中的验证环境都需要由initial语句块去创建, 而在仿真过程中, 验证环境中的对象可以创建和销毁, 因此软件测试端的资源占用是动态的。
软件环境中的initial块对语句有两种分组方式 , 使用begin ... end或fork... join。
begin ... end的语句以顺序的方式执行,而fork...join中的语句则以并发方式执行。
与fork... join类似的并行方式语句还包括fork...join_any,fork...join_none.
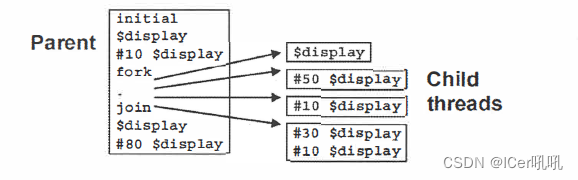
• 线程的执行轨迹是呈树状结构的, 即任何的线程都应该有父线程。
• 父线程可以开辟若干个子线程, 父线程可以暂停或者终止子线程。
• 当子线程终止时, 父线程可以继续执行。
• 当父线程终止时, 其所开辟的所有子线程都应当会终止。
2、线程的控制
2.1 fork.... join
//fork...join
initial
begin
$display("@%0t:start fork... join example", $time);
#10 $display("@%0t:sequential after #10", $time);
fork
$display("@%Ot: parallel start", $time);
#50 $display("@%0t:parallel after #50", $time);
#10 $display("@%0t: parallel after #lO", $time);
begin
#30 $display("@%0t:sequential after #30", $time);
#10 $display("@%0t:sequential after #10", $time);
end
join
$display ("@%0t:after join", $time);
#80 $display("@%0t: finish after #80", $time);
end
打印代码:
@0: start fork... join example
@10: sequential after #10
@10: parallel start
@20: parallel after #10
@40: sequential after #30
@50: sequential after #10
@60: parallel after #50
@60: after join
@140: finish after #80
2.2 fork...join_any
//fork...join_any
initial
begin
$display("@%0t:start fork... join_any example", $time);
#10 $display("@%0t:sequential after #10", $time);
fork
$display("@%Ot: parallel start", $time);
#50 $display("@%0t:parallel after #50", $time);
#10 $display("@%0t: parallel after #lO", $time);
begin
#30 $display("@%0t:sequential after #30", $time);
#10 $display("@%0t:sequential after #10", $time);
end
join_any
$display ("@%0t:after join", $time);
#80 $display("@%0t: finish after #80", $time);
end
打印代码:
@0: start fork... join_any example
@10: sequential after #10
@10: parallel start
@10: after join_any
@20: parallel after #10
@40: sequential after #30
@50: sequential after #10
@60: parallel after #50
@90: finish after #80
2.3 fork...join_none
//fork...join_none
initial
begin
$display("@%0t:start fork... none example", $time);
#10 $display("@%0t:sequential after #10", $time);
fork
$display("@%Ot: parallel start", $time);
#50 $display("@%0t:parallel after #50", $time);
#10 $display("@%0t: parallel after #lO", $time);
begin
#30 $display("@%0t:sequential after #30", $time);
#10 $display("@%0t:sequential after #10", $time);
end
join_none
$display ("@%0t:after join_none", $time);
#80 $display("@%0t: finish after #80", $time);
end
打印代码:
@0: start fork... join_none example
@10: sequential after #10
@10: after join_none
@10: parallel start
@20: parallel after #10
@40: sequential after #30
@50: sequential after #10
@60: parallel after #50
@90: finish after #80
2.4 等待所有衍生线程
• 在SV中, 当程序中的initial块全部执行完毕, 仿真器就退出了。
• 如果我们希望等待fork块中的所有线程执行完毕再退出结束initial块, 我们可以使用wait fork语句来等待所有子线程结束。
task run_threads; ... fork check_trans(trl); //线程1 check_trans(tr2); //线程2 check_trans(tr3); //线程3 join_none ... //等待所有fork中的线程结束再退出task wait fork; endtask
2.5 停止单个线程
在使用了fork.. join_any或者fork... join_none以后,我们可以使用disable来指定需要停止的线程。
parameter TIME_OUT = 1000; task check_trans{Transaction tr); fork begin //等待回应,或者达到某个最大时延 fork: timeout_block begin wait(bus.cb.addr == tr.addr); $display("@%0t: Addr match %d", $time, tr.addr); end #TIME_ OUT $display ("@%0t:Error: timeout, $time); join_any disable timeout_block; end join_none endtask
2.6 停止多个线程
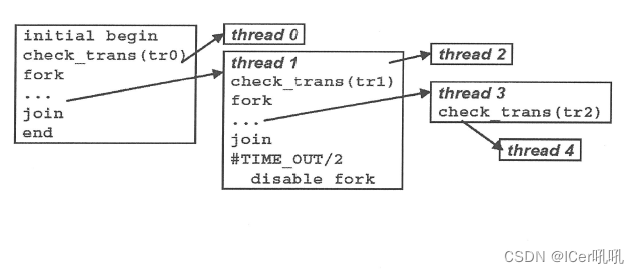
disable fork可以停止从当前线程中衍生出来的所有子线程。
initial begin check_trans(trO); //线程0 //创建一个线程来限制disable fork的作用范围 fork//线程1 begin check_trans(trl); //线程2 fork//线程3 check_trans(tr2); / /线程4 join //停止线程1-4, 单独保留线程0 #(TIME_OUT/2) disable fork end join end
2.7 停止被多次调用的任务
如果你给某—个任务或者线程指明标号, 那么当这个线程被调用多次以后 , 如果通过disable去禁止这个线程标号, 所有衍生的同名线程都将被禁止。
task wait_for_time_out(int id);
if (id == 0)
fork
begin
#2;
$display("@%0t:disable wait_for_time_out"' $time);
disable wait_for_time_out;
end
join_none
fork : just_a_little
begin
$display ("@%0t:%m: %0d entering thread", $time, id);
#TIME_OUT;
$display("@%0t:%m: %0d done", $0ime, id);
end
join_none
endtask
initial begin
wait_for_time_out(0); // Spawn thread 0
wait_for_time_out(1); // Spawn thread 1
wait_for_time_out(2); // Spawn thread 2
#(TIME_OUT*2) $display("@%0t:All done", $time);
end
• 任务wait_for_time_out被调用了三次, 从而衍生了三个线程。
• 线程0在#2延时之后禁止了该任务,而由于三个线程均是“ 同名”线程, 因此这些线程都被禁止了, 最终也都没有完成。
内容来源:IC修真院优秀学员
审核编辑:汤梓红
-
Verilog
+关注
关注
28文章
1351浏览量
110066 -
时钟
+关注
关注
10文章
1732浏览量
131437 -
RTL
+关注
关注
1文章
385浏览量
59752 -
程序
+关注
关注
117文章
3782浏览量
80990 -
线程
+关注
关注
0文章
504浏览量
19674
原文标题:IC学霸笔记 | SV线程
文章出处:【微信号:IC修真院,微信公众号:IC修真院】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
HDMI+AV+SV转HDMI、AV+SV转HDMI转换器芯片方案
双路400mA LED分段调色温专用芯片方案 SV420/SV425
DY-SV5W模块介绍
Linux线程实现与线程控制步骤简析
Java的线程课程

如何在基于SV的仿真环境中使用软件语言
Arduino串口控制DY-SV5W音频播放

网络广播对讲编码解码模块SV-2101V/SV-2103V介绍
线程池的线程怎么释放

核心线程数和最大线程数怎么设置
表面贴装压控晶体振荡器 DSV221SV DSV321SV :精准频率控制的卓越之选





 工商网监
工商网监
评论