 1D~4D雷达是如何区分出物体的?
1D~4D雷达是如何区分出物体的?

1D-RADAR
连续波(CW)雷达广泛应用于许多运动检测应用中。它通过比较发送和接收信号的频率差,来测量目标的速度。然而,CW雷达无法测量目标的距离,因为它无法区分频率变化是由于目标的速度变化还是距离变化。
频移键控(FSK)雷达也能根据速度分离对象,但它还具有测量距离的优点。FSK雷达通过改变发送信号的频率,然后比较接收信号和发送信号的频率差,来同时测量目标的速度和距离。因此,FSK雷达在需要同时测量速度和距离的应用中,比如交通监控和无人驾驶,具有明显的优势。
1D雷达可提供物体的信息:速度
如果两个物体的速度相同,雷达是无法将它们进行区分和定位的。上半部分我们可以看到两个并行移动的红色人形,这表示他们的速度是相同的。在这种情况下,雷达无法区分这两个物体,因此将它们检测为一个物体,就好像这两个人位于所有出现阴影的红色人形的位置一样。
下半部分可以看到一个黑色的人形,他的速度比上面的红色人形快。在这种情况下,雷达能够区分"红色"物体和"黑色"物体,并且如果黑色人形位于所有出现阴影的黑色人形的位置,雷达也能做到相同的区分。
2D-RADAR (FSK)
如果两个物体的速度和距离都相同,在一维环境中(没有角度信息),雷达是无法将它们进行区分和定位的。在上部我们可以看到两个并行的红色人形,他们离雷达的距离相同,且移动速度也一致。在这种情况下,雷达无法区分这两个物体,从而将它们检测为一个物体,就好像这两个人位于所有出现阴影的红色人形的位置一样。
2D雷达可提供物体的信息:速度和距离
在下半部分我们可以看到一个黑色的人形,他的速度不同于上面的红色人形,并且离雷达更近(距离不同)。在这种情况下,雷达能够区分"红色"物体和"黑色"物体,并且如果黑色人形位于所有出现阴影的黑色人形的位置,雷达也能做到相同的区分。
调频连续波(FMCW)雷达在仅测量速度不足够的情况下使用。如果雷达设备只有一个发送通道和一个接收通道,那么可以测量到物体的距离,但无法测量角位移。
3D雷达(FMCW MIMO)
3D雷达可提供物体的信息:速度、距离和角度
3D雷达拥有多个发射和接收天线。每个发射的信号都可以由任何天线接收。多个天线的特殊排列提高了空间分辨率,减少了对干扰的敏感性。具有相同速度、距离和角位置的物体可以被分离(具有在二维环境中定位物体的可能性)。
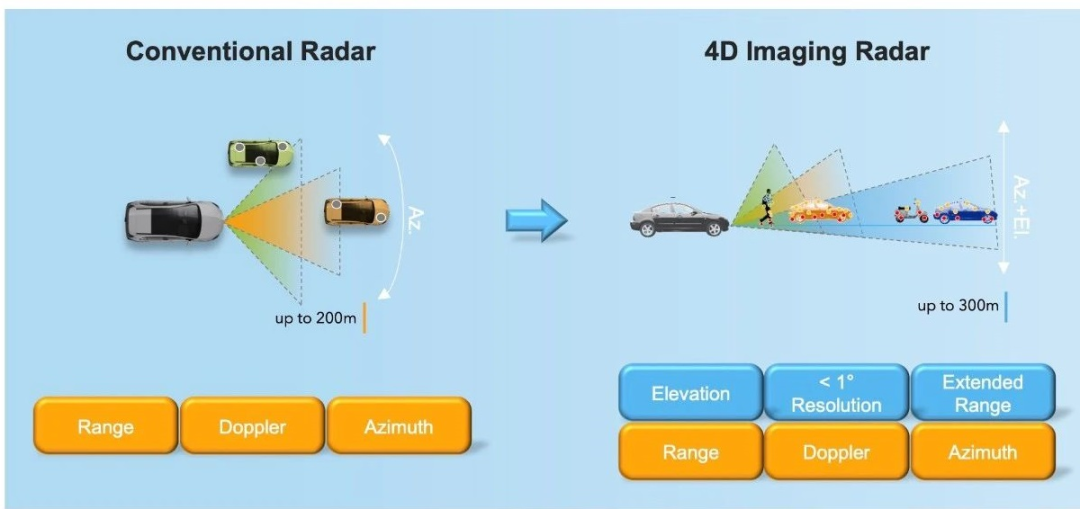
4D雷达(FMCW MIMO)
与3D雷达相比,4D雷达还具有在高程上偏移的多个天线,因此可以在仰角中分离检测。这使得可以在3D环境中进行定位。
4D雷达可提供物体的信息:速度、距离和角度(方位和俯仰)
通过速度、距离和角度(水平和垂直)来分离物体。具有相同速度、距离和角位置的物体可以被分离(具备在三维环境中定位物体的可能性)。
审核编辑:汤梓红
-
天线
+关注
关注
71文章
3418浏览量
144404 -
FSK
+关注
关注
14文章
118浏览量
60614 -
雷达
+关注
关注
52文章
3429浏览量
124724 -
接收信号
+关注
关注
0文章
20浏览量
7504
原文标题:1D~4D雷达是如何区分出物体的?
文章出处:【微信号:雷达通信电子战,微信公众号:雷达通信电子战】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
4D成像雷达专栏 | 4D高分辨毫米波雷达概述

从4D到4D数字成像,雷达数字化升级助力实现更好的智能驾驶

神奇的4D打印:物体可完成自我组装
基于Vayyar的4D MIMO片上雷达评估套件
什么是4D毫米波雷达?
4D毫米波雷达市场技术盘点
中央域控雷达:4D雷达新时代

使用单芯片 8 x 8 级联收发器实现 4D 雷达成像
4D毫米波雷达为什么称为激光雷达的“替身”?



评论