 STM32基础知识:PWM控制舵机
STM32基础知识:PWM控制舵机
PWM控制舵机
1 舵机简介
伺服电机通常被称为舵机,它是一种带有输出轴的小装置。当我们向伺服器发送一个控制信号时,输出轴就可以转到特定的位置。只要控制信号持续不变,伺服机构就会保持轴的角度位置不改变。如果控制信号发生变化,输出轴的位置也会相应发生变化。日常生活中,舵机常被用于遥控飞机、遥控汽车、机器人等领域。
舵机在机器人领域非常有用。因为舵机有内置的控制电路,它们的尺寸虽然很小,但输出力够大。像Futaba S-148这样的标准舵机能提供 0.3牛/米的扭矩,相对于它的外形大小来说这已经足够强大了。同时,舵机消耗的能量与机械负荷成正比。因此,一个轻载的舵机系统不会消耗太多的能量。
2 舵机结构
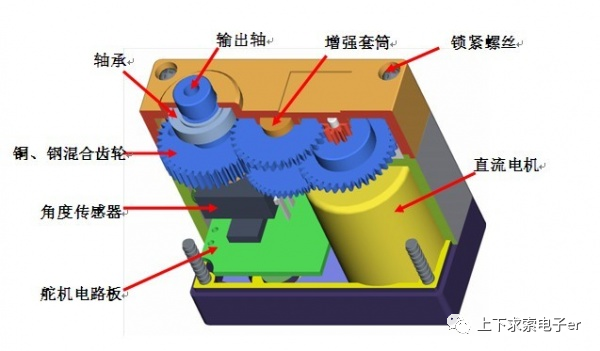
舵机主要由以下几个部分组成:外壳、舵盘、直流电机、减速齿轮组、角度传感器、控制驱动电路和接口线缆等。常见的舵机内部结构如下图所示。
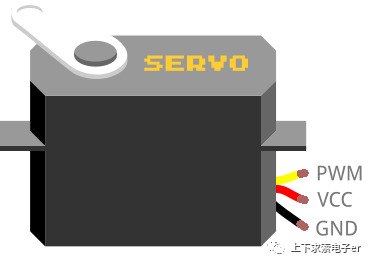
舵机的输入有三根线,一般的中间的红色线为电源正极,咖啡色线的为电源负极,黄色色线为控制线号线。
3 舵机控制
控制线用于传输角度控制信号。这个角度是由控制信号脉冲的持续时间决定的,这叫做脉冲编码调制(PCM)。舵机的控制一般需要一个20ms左右的时基脉冲,该脉冲的高电平部分一般为0.5ms-2.5ms范围,总间隔为2ms。脉冲的宽度将决定马达转动的距离。
例如:1.5毫秒的脉冲,电机将转向90度的位置(通常称为中立位置,对于180°舵机来说,就是90°位置)。如果脉冲宽度小于1.5毫秒,那么电机轴向朝向0度方向。如果脉冲宽度大于1.5毫秒,轴向就朝向180度方向。以180度舵机为例,对应的控制关系是这样的:
| 0.5ms | 0度 |
|---|---|
| 1.0ms | 45度 |
| 1.5ms | 90度 |
| 2.0ms | 135度 |
| 2.5ms | 180度 |
4 任务实践
通过按键控制舵机角度,当KEY1按下后, 减少占空比,当KEY2按下后,增加占空比,并在串口输出此时的角度。
- PWM参数计算
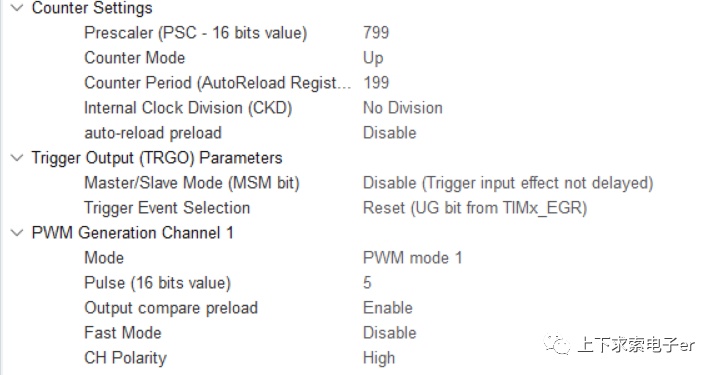
PWM信号周期Period=20ms,采用STM32内部8MHz的时钟,计算可得(ARR+1)*(PSC+1)=160000,故可取ARR=199,PSC=799。舵机为0度时,高电平持续时间为0.5ms,即占空比Duty=0.025,则CCR初始值可以设为5.
PWM参数计算在STM32基础:定时器的PWM输出功能中有详细讲解。
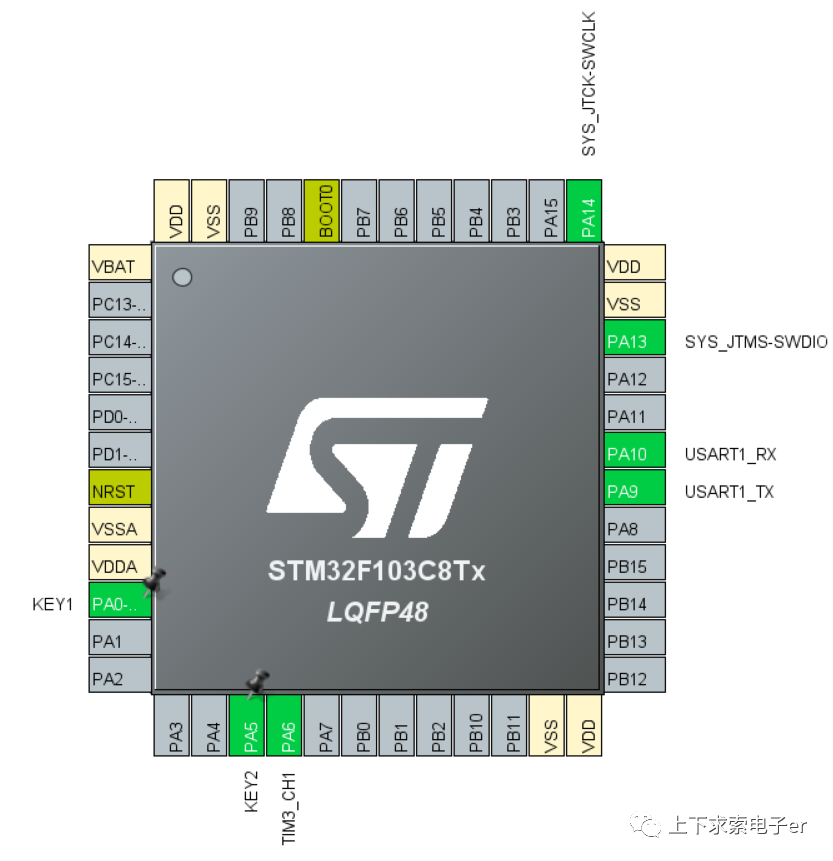
- 在CubeMX中配置PWM(采用定时器3通道1)、串口以及按键1和按键2对应GPIO为中断模式并使能.


在CubeMX中配置串口,在Keil中使用“Use MicroLIB”并在代码中重定向printf函数的方法在STM32基础:定时器的定时计数功能有详细讲解。
在CubeMX中配置GPIO中断并使能的方法已经按键的相关操作在STM32基础:中断系统中有详细讲解。
- 编写代码
/* USER CODE BEGIN PD */
#define CCR_MAX 25 // CCR最大值
/* USER CODE END PD */
/* USER CODE BEGIN PV */
uint16_t CCR = 5; // CCR初始值
uint16_t Step = 5; // CCR步进值
/* USER CODE END PV */
/* USER CODE BEGIN 4 */
void HAL_GPIO_EXTI_Callback(uint16_t GPIO_Pin)
{
if(GPIO_Pin == KEY1_Pin)
{
(CCR >= CCR_MAX) ? (CCR = 5) : (CCR += Step);
__HAL_TIM_SetCompare(&htim3, TIM_CHANNEL_1, CCR);
printf("Sigle = %d", (CCR/5 - 1)*45);
HAL_Delay(200);
}
else if (GPIO_Pin == KEY2_Pin)
{
(CCR <= 5) ? (CCR = CCR_MAX) : (CCR -= Step);
__HAL_TIM_SetCompare(&htim3, TIM_CHANNEL_1, CCR);
printf("Sigle = %d", (CCR/5 - 1)*45);
HAL_Delay(200);
}
}
/* USER CODE END 4 */
-
直流电机
+关注
关注
36文章
1710浏览量
70395 -
PWM
+关注
关注
114文章
5197浏览量
214796 -
STM32
+关注
关注
2272文章
10923浏览量
357467 -
伺服电机
+关注
关注
85文章
2057浏览量
58172 -
舵机
+关注
关注
17文章
280浏览量
41178
发布评论请先 登录
相关推荐
电机控制基础知识1—定时器基础知识与PWM输出原理

STM32之 PWM控制舵机
定时器基础知识与PWM输出原理是什么
STM32 CubeMX学习:5. 其他PWM设备

STM32—TIM3输出PWM信号驱动MG996R舵机(按键控制)
电机控制基础——定时器基础知识与PWM输出原理
【K210+micropython】PWM信号控制舵机





 工商网监
工商网监
评论