 【科普】干货!带你从0了解移动机器人(六) (底盘结构类型)
【科普】干货!带你从0了解移动机器人(六) (底盘结构类型)
不同移动机器人有着不同的构型,不同构型会带来性能上的差异,性能上的差异决定了其应用的场景。本文主要从本体构型及轮子等方面对常见移动机器人底盘结构进行介绍分析。
1、单舵轮
单舵轮结构是最简单的底盘结构之一,其底盘结构由1个舵轮、 2个定向轮组成,在叉车上面有着非常广泛的应用。单舵轮底盘结构可以直接适应各种地面,保证驱动舵轮一定着地。结构简单、成本低,由于是单轮驱动,无需考虑电机配合问题,适用于广泛的环境和场合。

2、双舵轮底盘
双舵轮底盘结构是目前市场上最常见的结构之一,其底盘由两个驱动轮和一个或多个非驱动轮组成,通常应用于中等载重的AGV上。双舵轮底盘结构设计可以实现360°回转功能,也可以实现万向横移,灵活性高且具有精确的运行精度,因此在市场上得到了广泛应用。

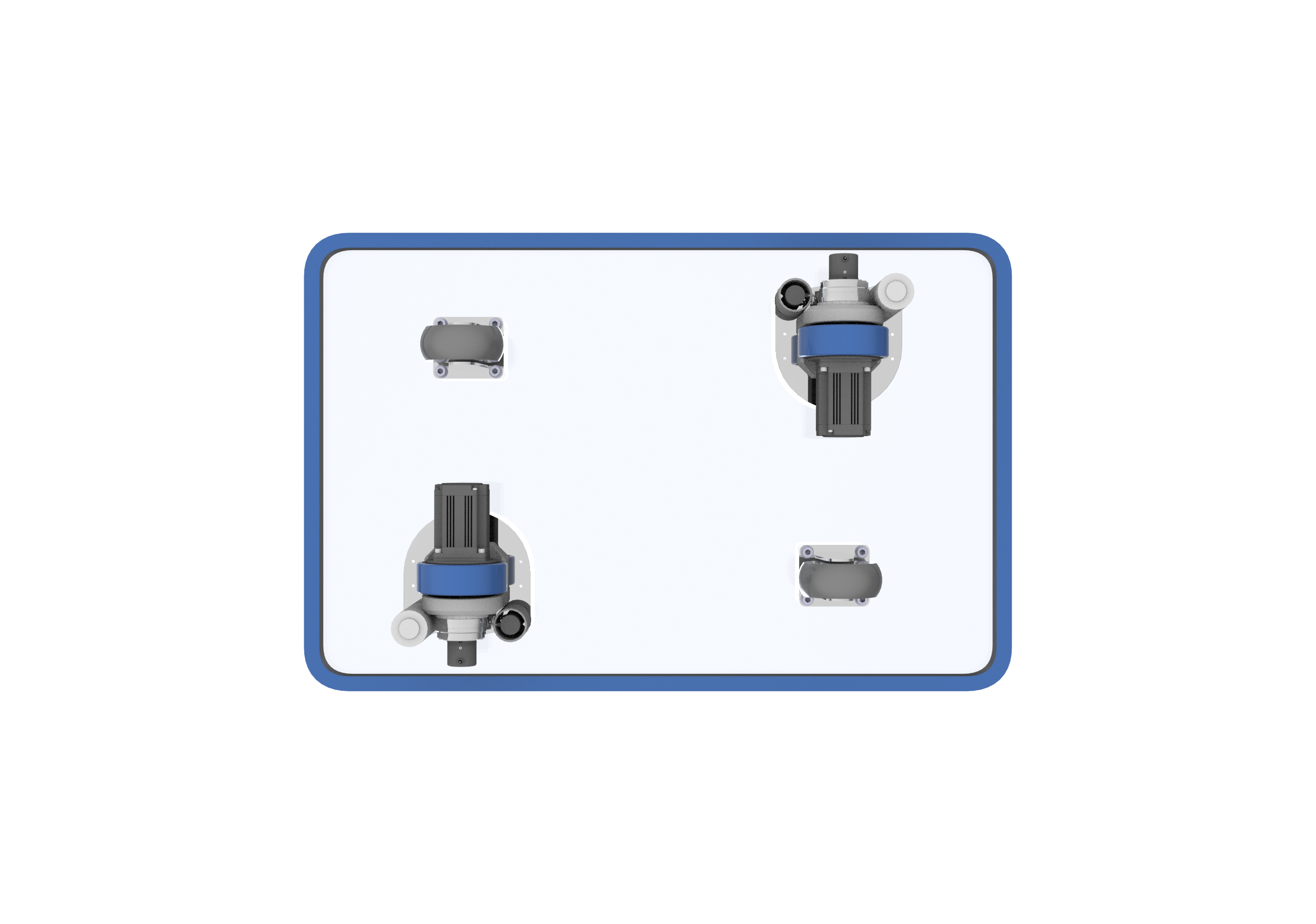
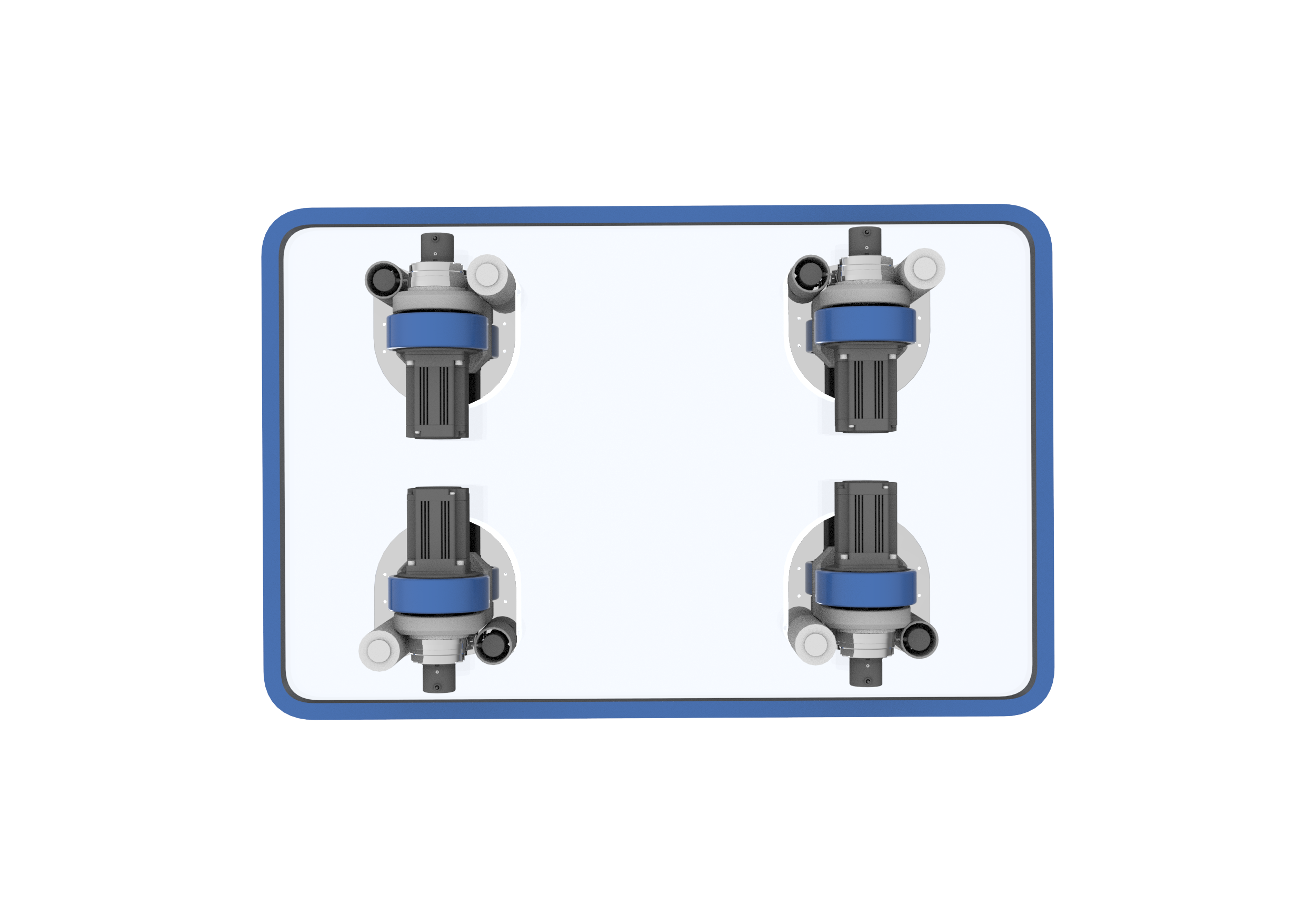
3、四舵轮底盘
四舵轮底盘结构是通过4个舵轮的转角及速度实现AGV的横向、斜向和原地旋转运动,成为了近年来重载移动机器人领域的研究热点。采用四舵轮底盘结构的AGV可以同时满足狭窄工作空间下的灵活性要求和车间复杂路面条件下的适用性要求,但由于其底盘结构复杂,使其在路径跟踪过程中存在不稳定的现象,不利于实际生产中的应用。
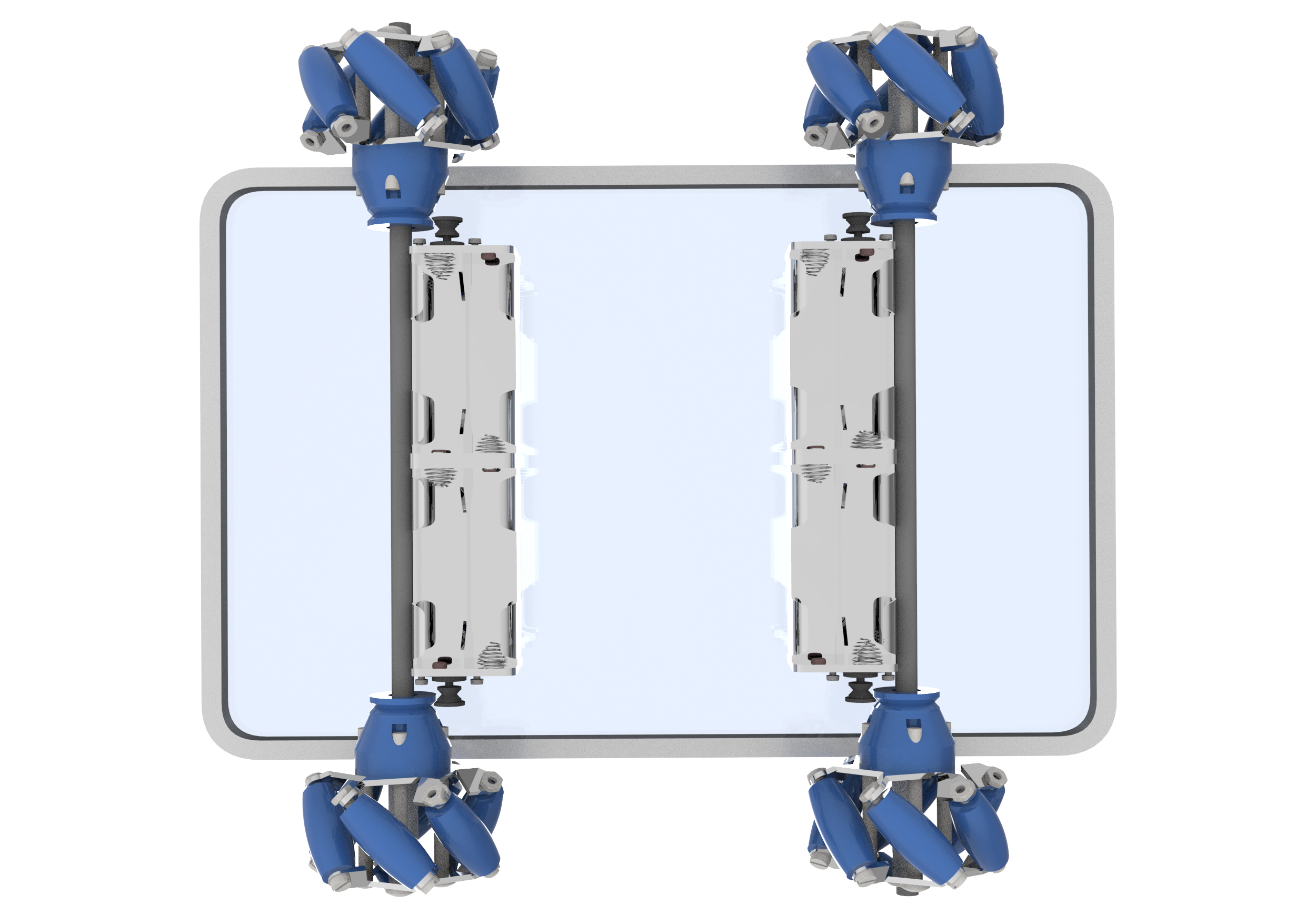
4、麦克纳姆轮底盘
麦克纳姆轮是一种结构特殊的全向轮。近年来,基于麦克纳姆轮的全方位式移动AGV也开始逐步走进人们的视野,在一些特殊应用场景发挥着作用。相比于万向轮,麦克纳姆轮具有灵活、精确、高效的特点,是一种可以控制的万向轮。而基于麦克纳姆轮的AGV与一般AGV相比其最大的特点也在于其运转灵活、占用空间小。
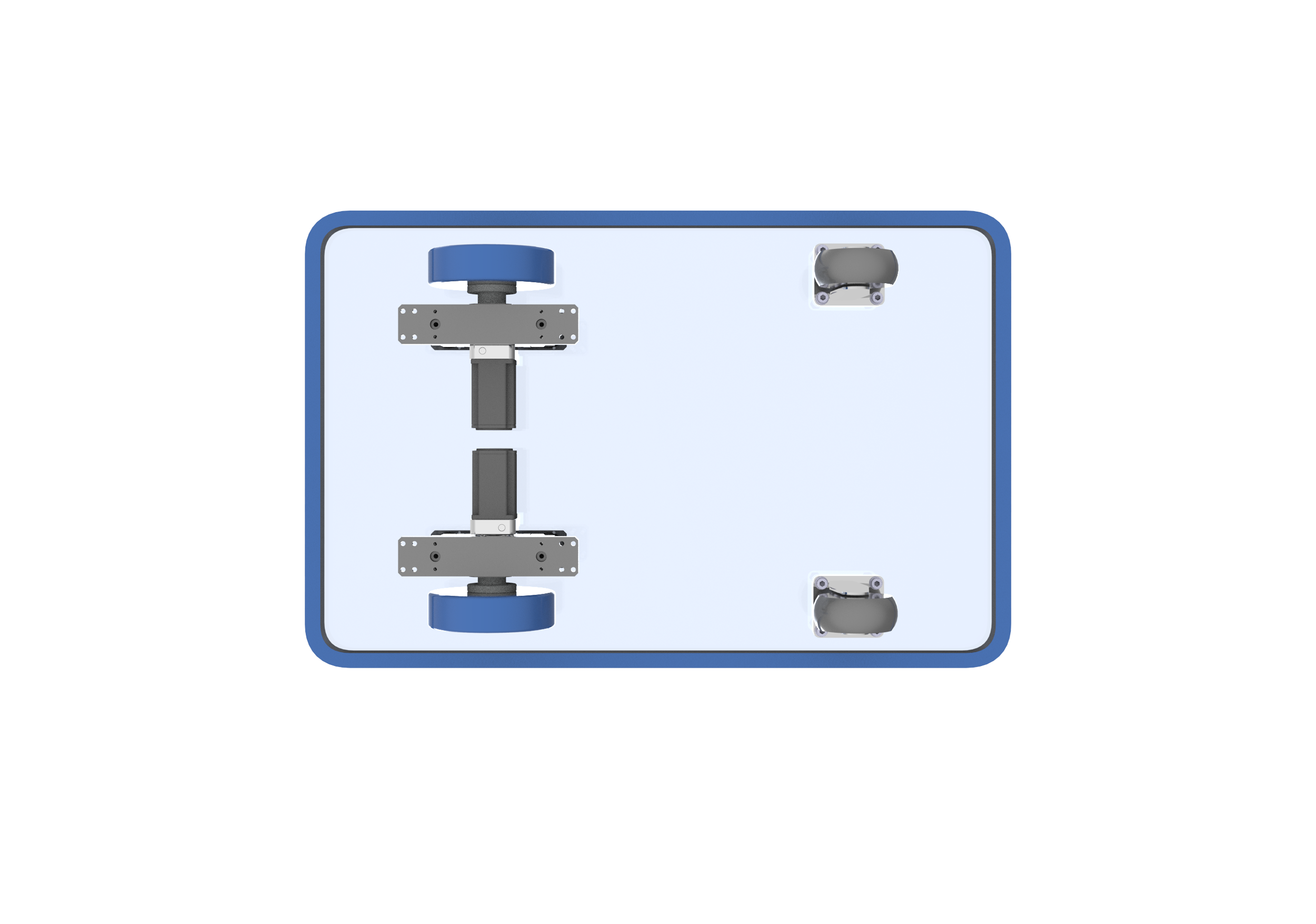
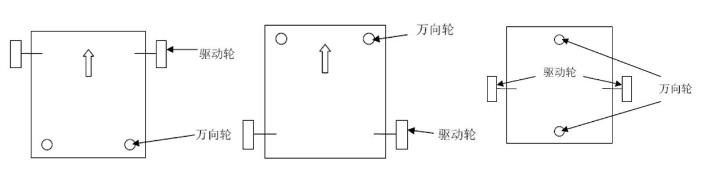
5、两驱差速底盘
两驱差速底盘结构由两个差速轮作为驱动轮和随动轮组成。在自动运行状态下该底盘小车能做前进、后退行驶并能垂直转弯。和舵轮驱动的四轮行走机构小车相比,该车型由于省去了舵轮,不仅可以还能节省空间,小车可以做的更小些,因此常用于潜伏式AMR。
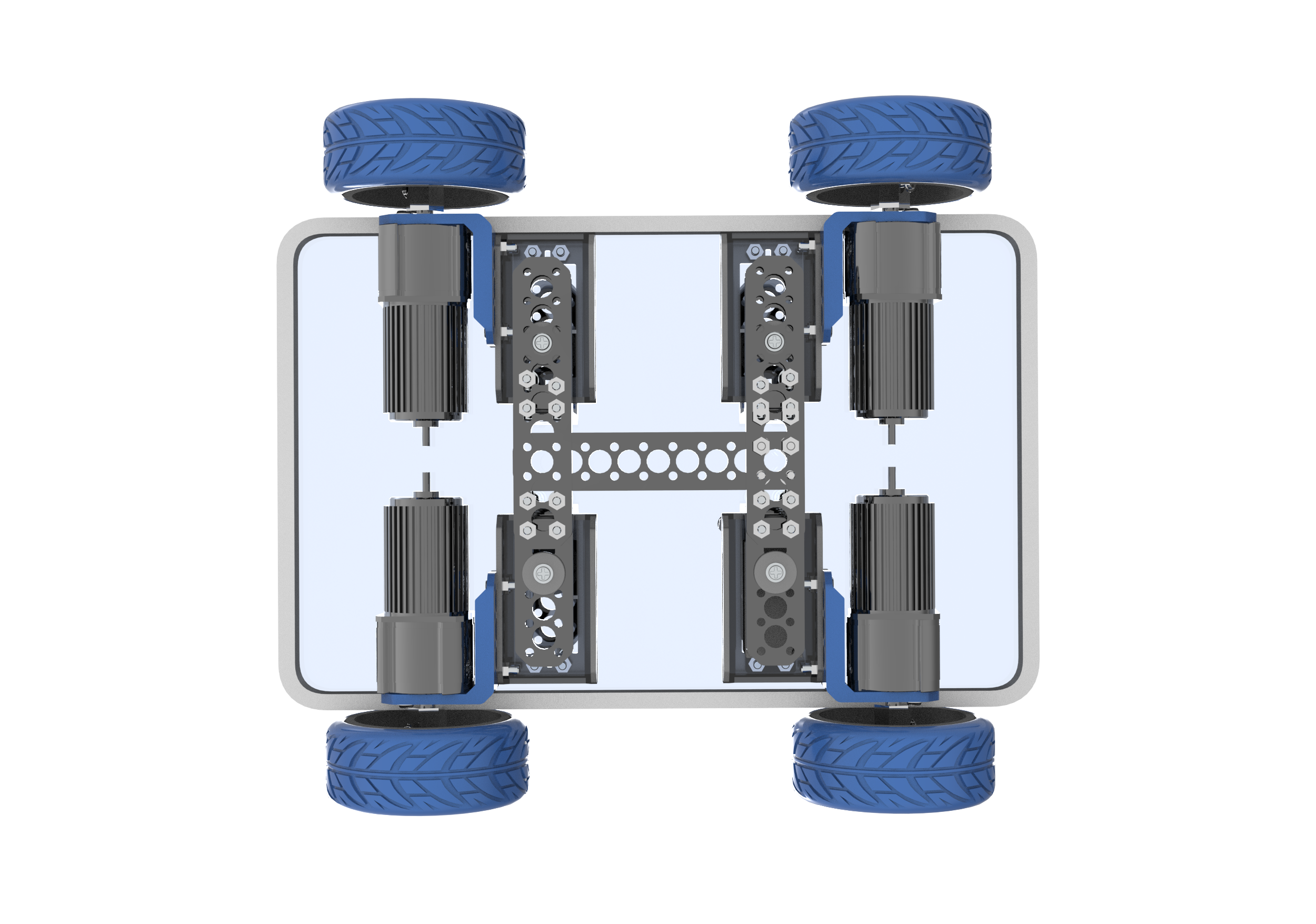
6、四驱差速底盘
四驱差速底盘结构由四个差速轮作为驱动轮组成,驱动每个车轮的力矩分配系统,将动力传递到车辆的四个轮子上,可以实现原地转向运动。小车可以根据路面状况和车辆动力需求自动调整每个车轮的扭矩分配,以提供最佳的牵引力和操控性能。
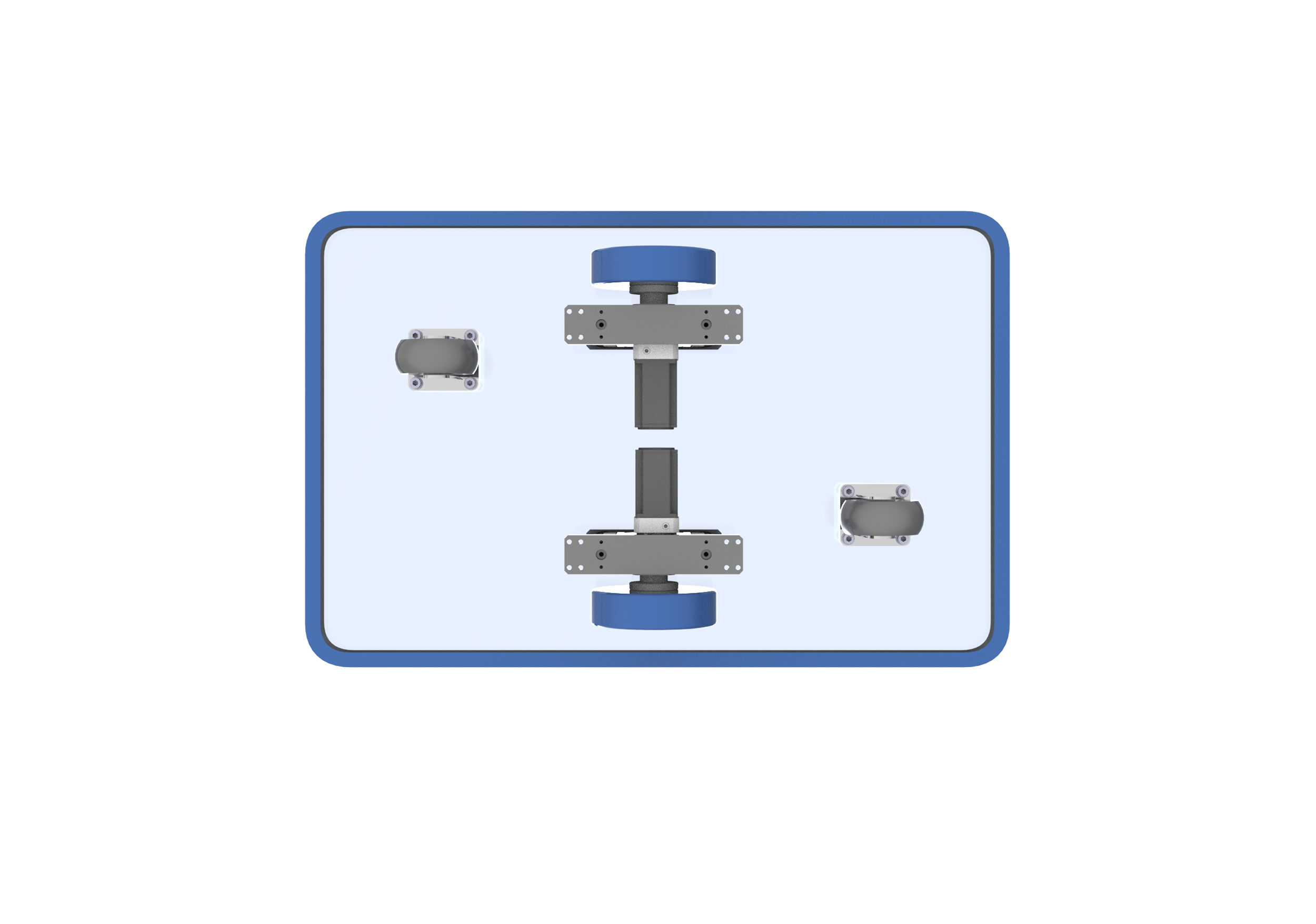
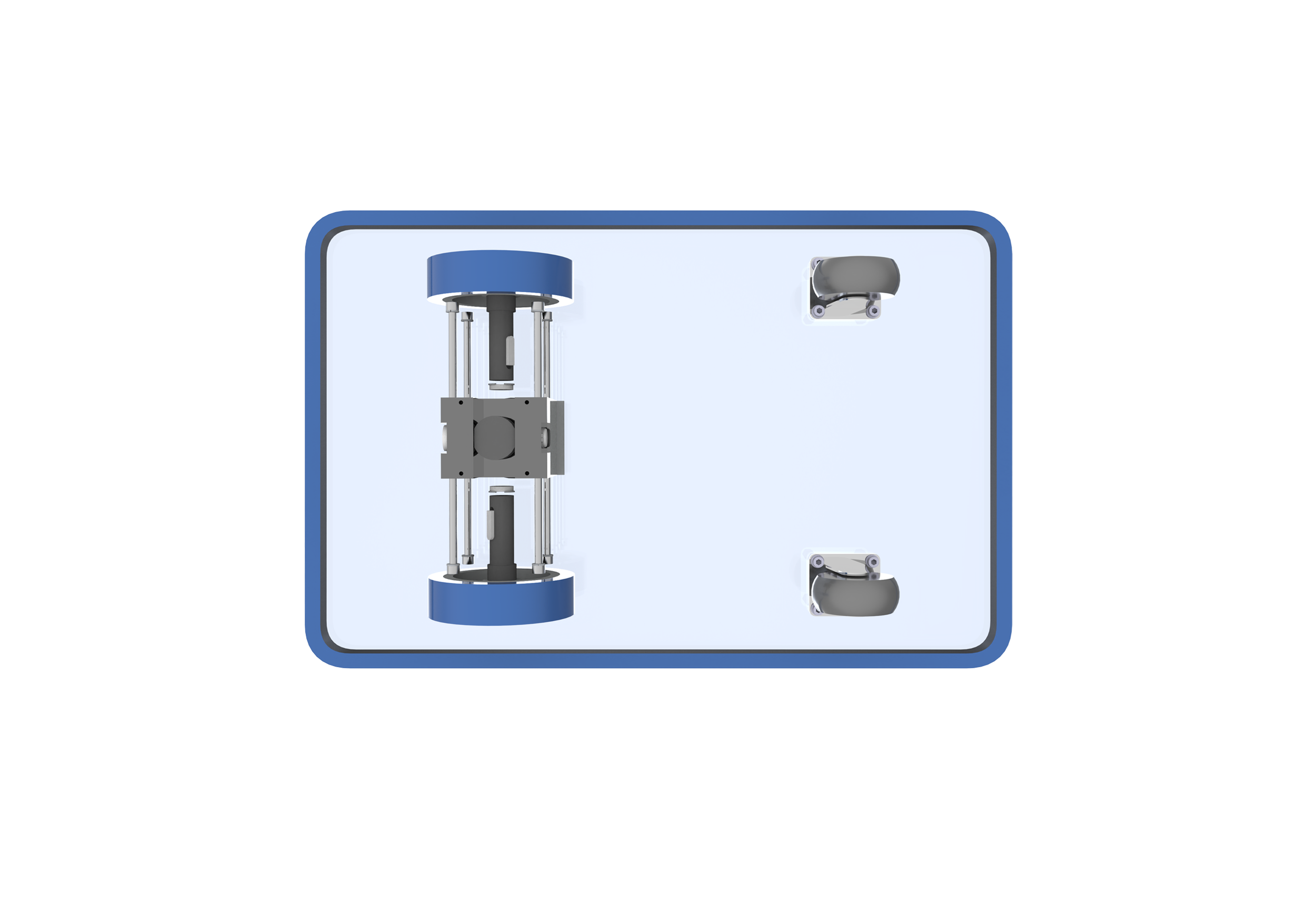
7、单差速总成
单差速总成底盘是由一对可调速的差速驱动轮和一个可活动的连杆转盘,共同组成的一个差速轮组,通过左右轮的差速进行驱动。依托装置于中间的可活动的转盘机构,可以快速的完成一个整体稳住的转向和角度控制。它能够提供较好的驱动力和操控性能,适用于多种路况下的驾驶需求。
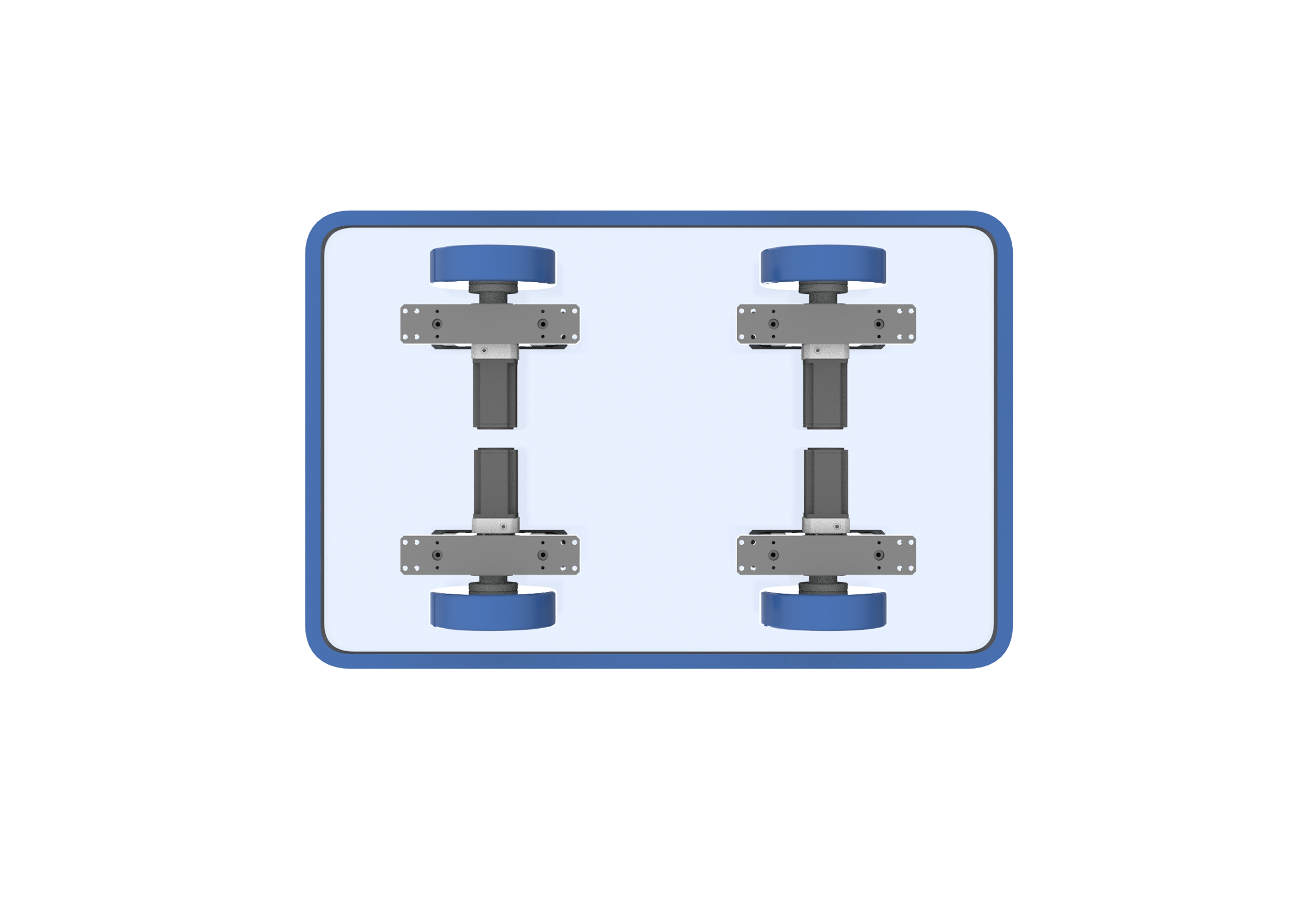
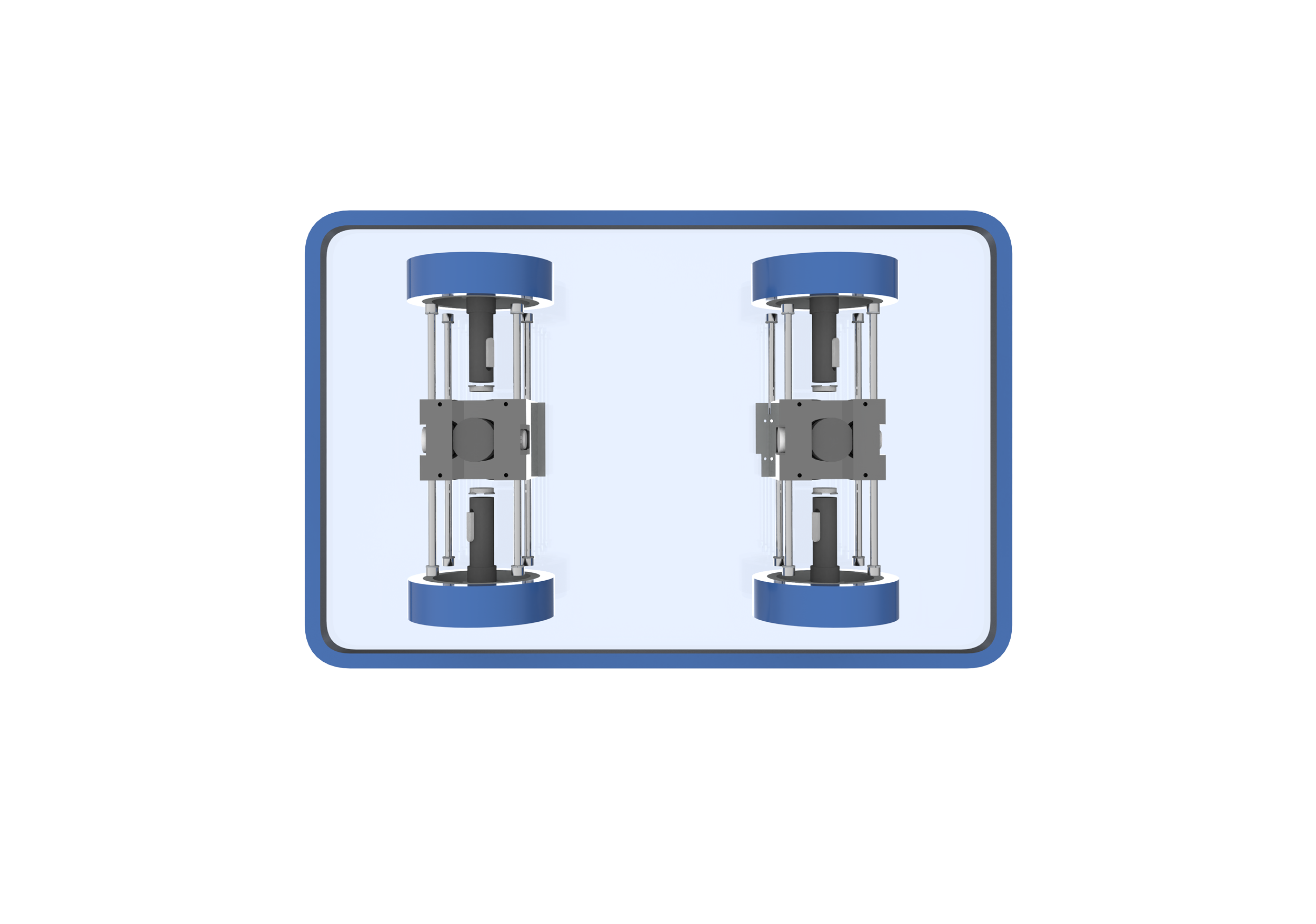
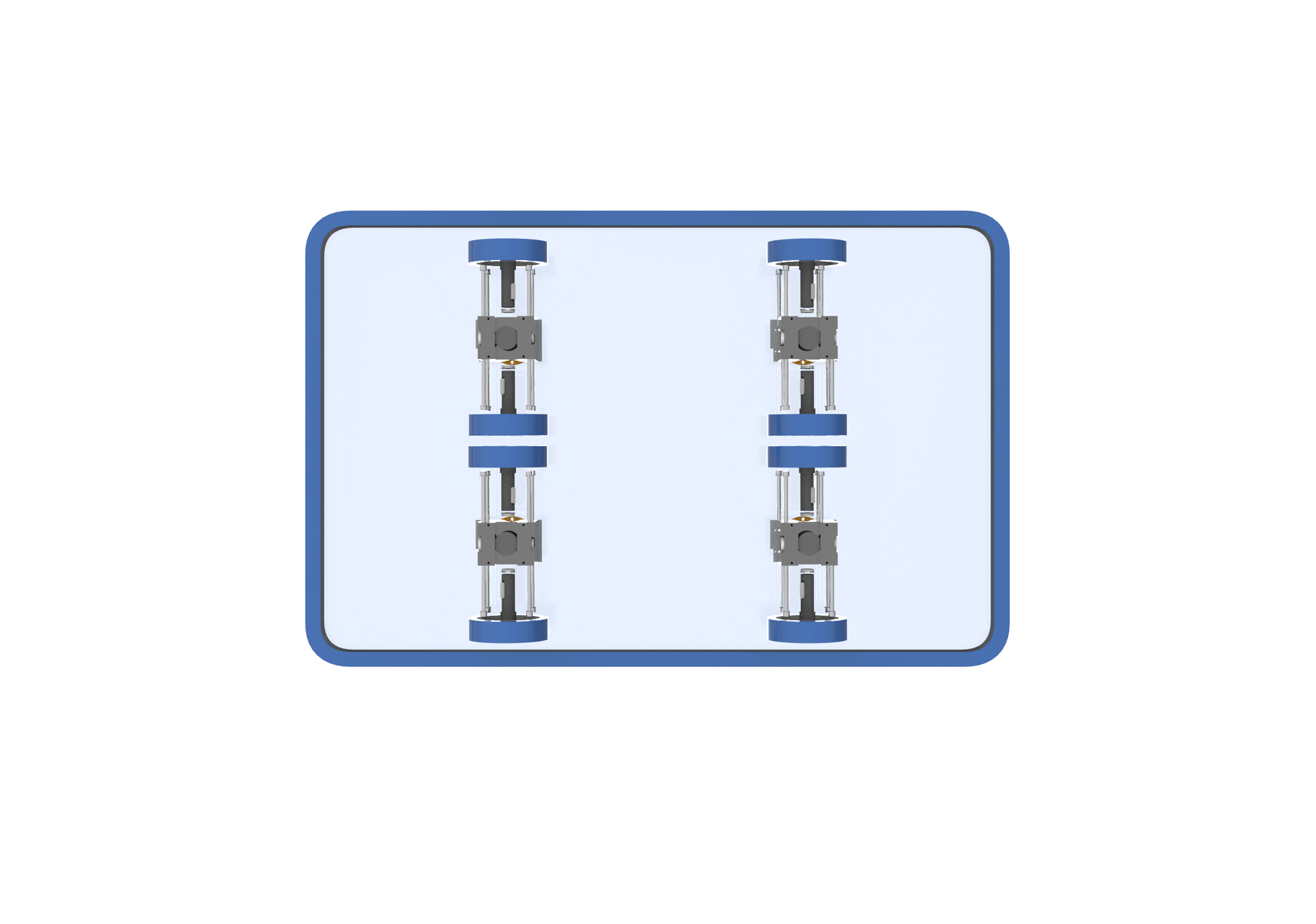
8、双差速总成底盘
双差速总成底盘在结构上与单差速总成底盘类似,由两对差速轮组组成,使得左右两侧的车轮能够独立控制。与单差速总成底盘相比,双差速总成底盘具有更好的操控性能和通过性。
9、四差速总成底盘
四差速总成底盘在双差速总成底盘的基础上增加了两对差速轮组,使得车辆具备更强的通过性和操控性能。四差速总成底盘多适用于重载车辆,因为它的底盘相当于比较灵活,对地面的磨损比较小,且载重能力强。
10、阿克曼底盘
阿克曼底盘是一种常见的乘用车底盘结构,通过不同转向角度来实现车辆转弯的原理,实现车辆的转向和操控。它具有良好的操控性能、稳定性和舒适性。
-
机器人
+关注
关注
210文章
28180浏览量
206315 -
移动机器人
+关注
关注
2文章
757浏览量
33540 -
底盘
+关注
关注
3文章
243浏览量
14657 -
AGV
+关注
关注
27文章
1277浏览量
41000
发布评论请先 登录
相关推荐
Labview My RIO 移动机器人
如何实现移动机器人的设计?
移动机器人底盘主要包含哪些设备
【科普】干货!带你从0了解移动机器人(三) ——自主导航系统及上位机软件设计与实现
【科普】干货!带你从0了解移动机器人(四) ——移动机器人导航技术
领衔资讯移动机器人有哪几种底盘结构?
移动机器人底盘的功能及应用
【科普】干货!带你从0了解移动机器人(一)— 什么是移动机器人
【科普】干货!带你从0了解移动机器人(二)—— 移动机器人硬件组成

【科普】干货!带你从0了解移动机器人(四) ——移动机器人导航技术

【科普】干货!带你从0了解移动机器人(一)—— 什么是移动机器人

【科普】干货!带你从0了解移动机器人(二)—— 移动机器人硬件组成
【科普】干货!带你从0了解移动机器人(四) ——移动机器人导航技术
带你从0了解移动机器人(五) ( 如何选择控制器类型)





 工商网监
工商网监
评论