 车载时间融合与utc同步
车载时间融合与utc同步
时间融合和使用
对于整车来说,Tsync模块需要将整车所有vehicle time和utc同步好,对于用户来说,开发者最好提供获取vehicle time和utc时间的接口,用户无需要关注时钟同步的过程和细节。
- 时间融合与utc同步
前面提到vehicle time和utc的精度不一样,所以使用场景各有不同,也就意味着同一个ecu内,应该同时存在上述两种时间,我们以网关(GW),座舱控制器(CDC),智驾控制器(ADC)以及TBOX为例分析。
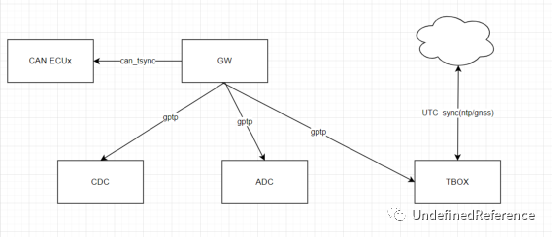
如上图所示,vehicle time可以借助gptp以及can_tsync让所有ecu保持同步,而utc时间必须借助外部环境先同步TBOX。但是如何让GW, CDC ,ADC也能同步UTC时间呢?
针对上述拓扑,vehicle master和utc master不在同一个ecu,可以借助当前最火的SOA思想,在TBOX上部署UtcServiceProvider,提供GetUtc和PubUtc两种接口,而GW, ADC, CDC则可以部署UtcServiceConsumer。为了消除SOA传输带来的延迟,我们可以将TBOX的utc和vehicle time一同给到consumer端,这样的话,UTCconsumer=UTC(provider)+(vehicle_time(consumer)-vehicle_time(provider))。
如果vehicle master和utc master在同一个ecu,如下图,这种方式相对来说,会更加简单一点。比如我们可以将utc的时间在tbox上于vehicle time同步,然后通过gptp的报文,简介的同步所有的ecu的utc时间。
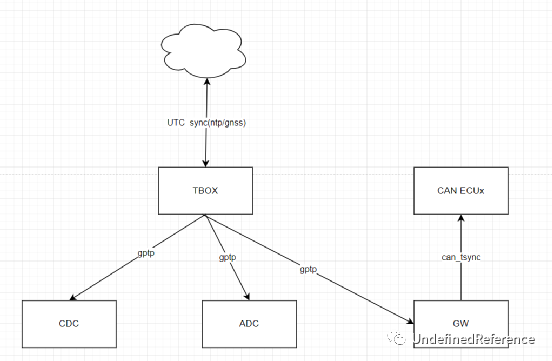
不管上述任何一种情况,实际并不复杂,前一种让架构部门输出soa的描述语言(arxml,idl),由下游直接生成服务和实现服务即可;而后一种情况从方式较为简单了,但是需要考虑时间跳变的问题。
- 对外接口
针对使用者来说,期望能够直接获取utc时间或者vehicle time,所以开发者理应再提供接口直接获取,屏蔽使用者无需关心的细节。代码示例如下:
C++
class JinbaoClock {
public:
static struct timespec GetVehicleTime()
{
struct timespec ts_ptp;
if (clock_gettime(clk_id_, &ts_ptp)) {
return {};
}
return ts_ptp;
}
static struct timespec GetUtc()
{
struct timespec ts_utc;
if (clock_gettime(CLOCK_REALTIME, &ts_utc)) {
return {};
}
return ts_utc;
}
};
-
模块
+关注
关注
7文章
2744浏览量
47887 -
控制器
+关注
关注
113文章
16508浏览量
179970 -
车载
+关注
关注
18文章
617浏览量
83514 -
时钟同步
+关注
关注
0文章
89浏览量
12817
发布评论请先 登录
相关推荐
怎样把嵌入式默认UTC时间改为CST本地时间
怎么将hwclock同步到系统时间上,并设置成CST时间?
适用于WSN的时间同步方法
GPS、北斗授时模块普及:UTC时间,GMT,GPS时,北斗时,北京时间及其关系
GPS和北斗授时模块的介绍及UTC、GMT、GPS、北斗时和北京时间的关系
嵌入式linux设置本地时间CST以及同步网络时间命令

MAX6459UTC+T PMIC - 监控器

车载以太网时间同步之EthTsync技术解析

车载以太网时间同步AUTOSAR层级关系
车载以太网时间同步Time Slave行为


智能驾驶数据融合的时间同步关键技术
车载gptp同步原理介绍





 工商网监
工商网监
评论