 24GHz轨迹跟踪雷达模组,可检测区域内人员位置、数量
24GHz轨迹跟踪雷达模组,可检测区域内人员位置、数量
前言
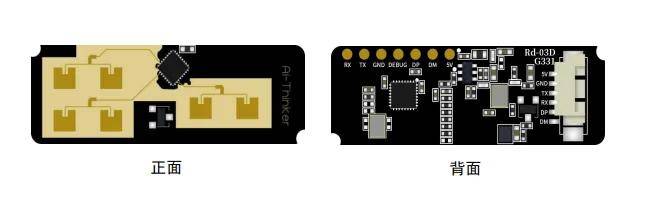
安信可新款雷达模组Rd-03D已经上市,该雷达采用一发两收的天线,可以实现目标跟踪,实现对区域内目标测距、测角和测速。
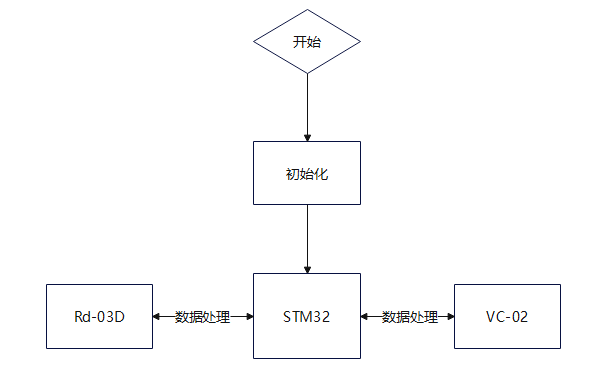
本应用示例使用STM32解析Rd-03D的串口数据,将结果通过另一个串口发送给VC-02开发板,实现对当前人数的实时播报。
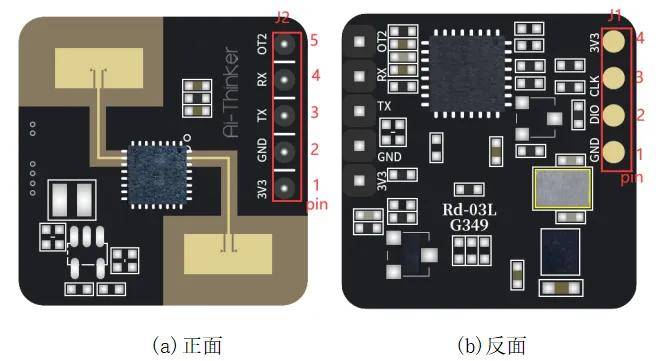
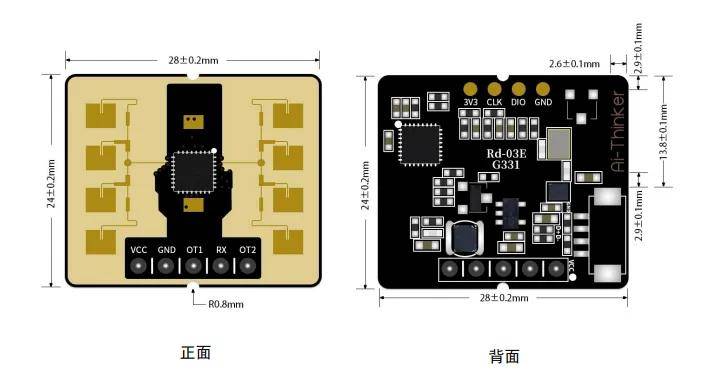
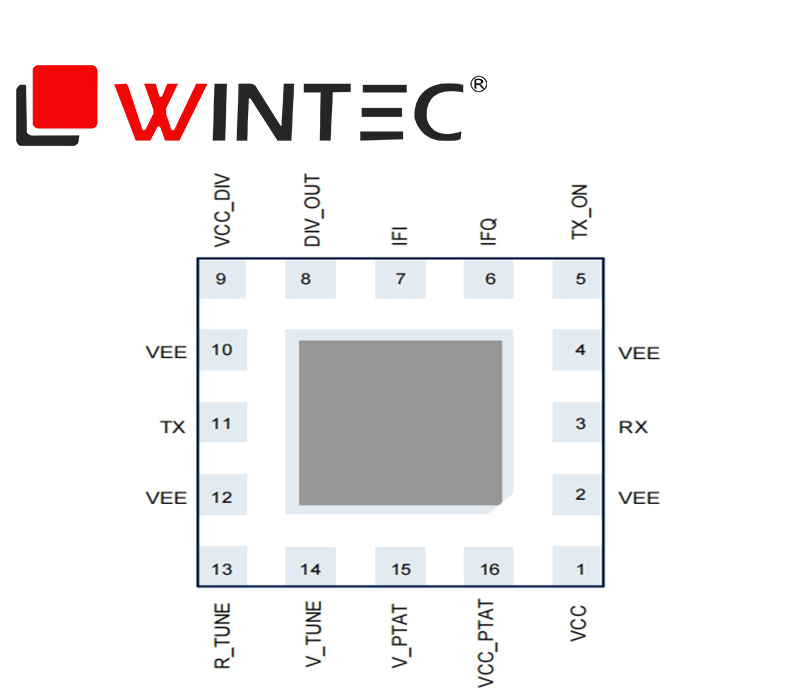
01Rd-03D引脚说明
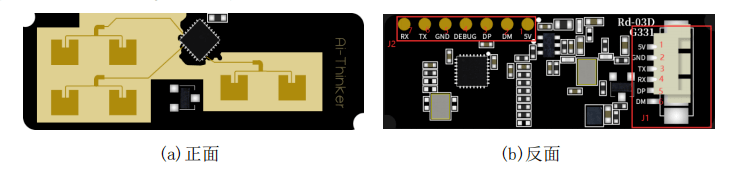
J1引脚说明:

J2引脚说明:

02软件设计框架
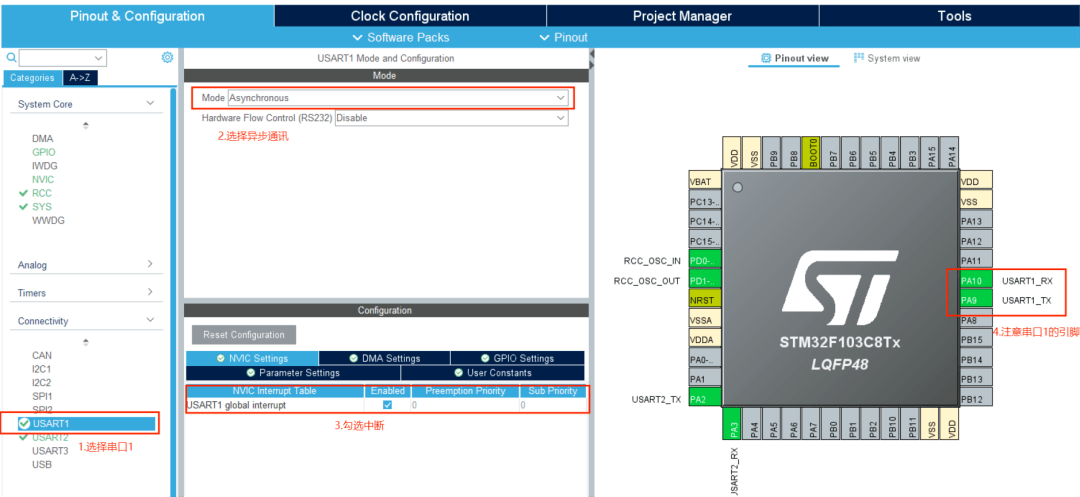
03STM32F103C8T6使用CubeMX搭配HAL库配置
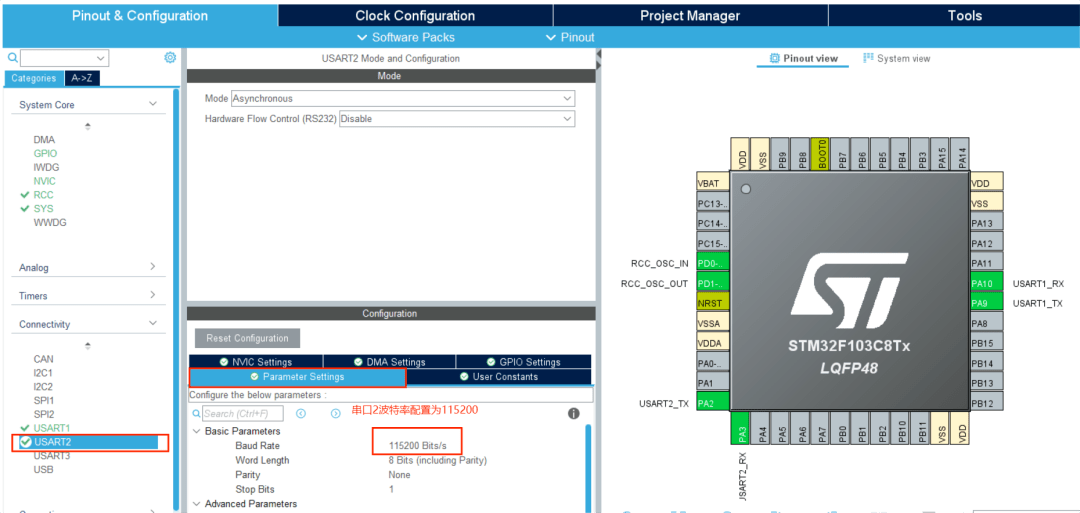
打开CubeMX,选择STM32F103C8T6。
选择两个串口,分别是串口1和串口2,PA9为USART1_TX,PA10为USART1_RX,PA2为USART2_TX,PA3为USART_RX。
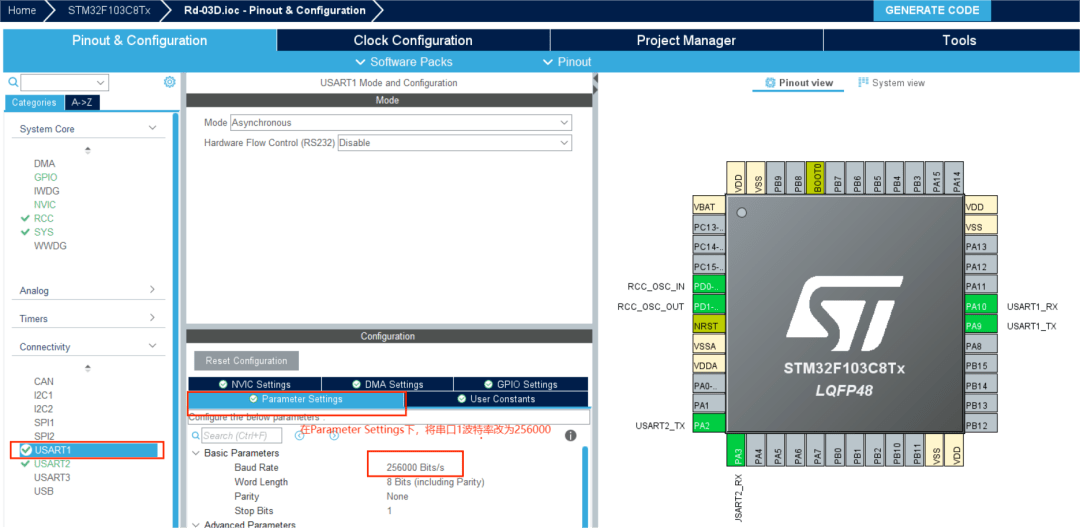
选择异步通讯,勾选中断,注意:串口1的波特率为256000,串口2波特率为115200。
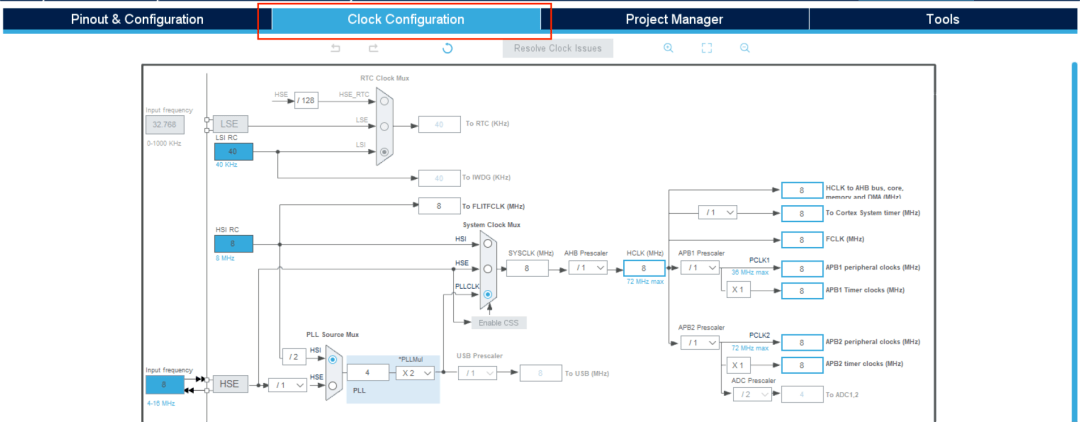
下面附上时钟配置图:
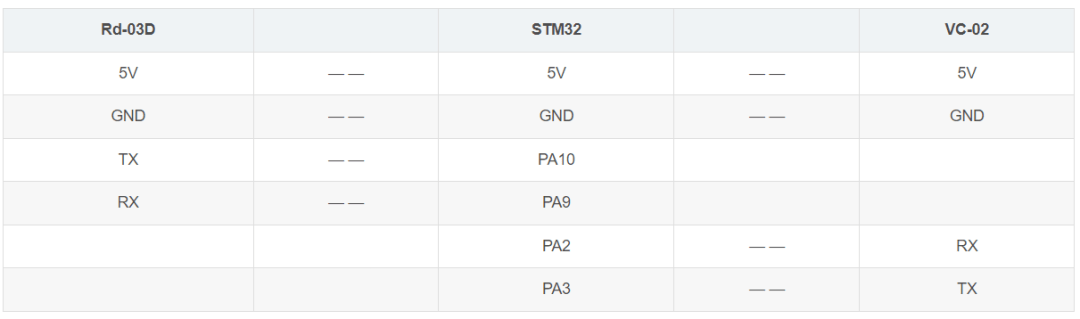
04STM32与Rd-03D和VC-02的接线
05串口数据处理
一、Rd-03D的串口数据
Rd-03D模组通过串口(TTL电平)与外界通信,雷达串口默认波特率为256000,1停止位,无奇偶校验位。雷达输出检测到的目标信息,包括在区域中的x坐标,y坐标,以及目标的速度值。
雷达默认是处于单目标检测模式,需要切换至多目标检测模式。

上报是数据帧格式:

数据示例:AA FF 03 00 0E 03 B1 86 10 00 68 01 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 55 CC
红色部分表示目标1的信息,蓝色表示目标2的信息,绿色表示目标3的信息。(详情可查看原博文内容)
本示例只展示有无人,所以只需要判断在对应的数据帧中有没有相应的目标信息即可。
二、VC-02的串口数据
VC-02的串口数据格式是由用户自定义的,开发的平台和资料可以在VC系列模组官网查看
这里附上测试中定义的串口协议和语音指令表格,串口输出均为16进制数,文章结尾附上VC-02固件。

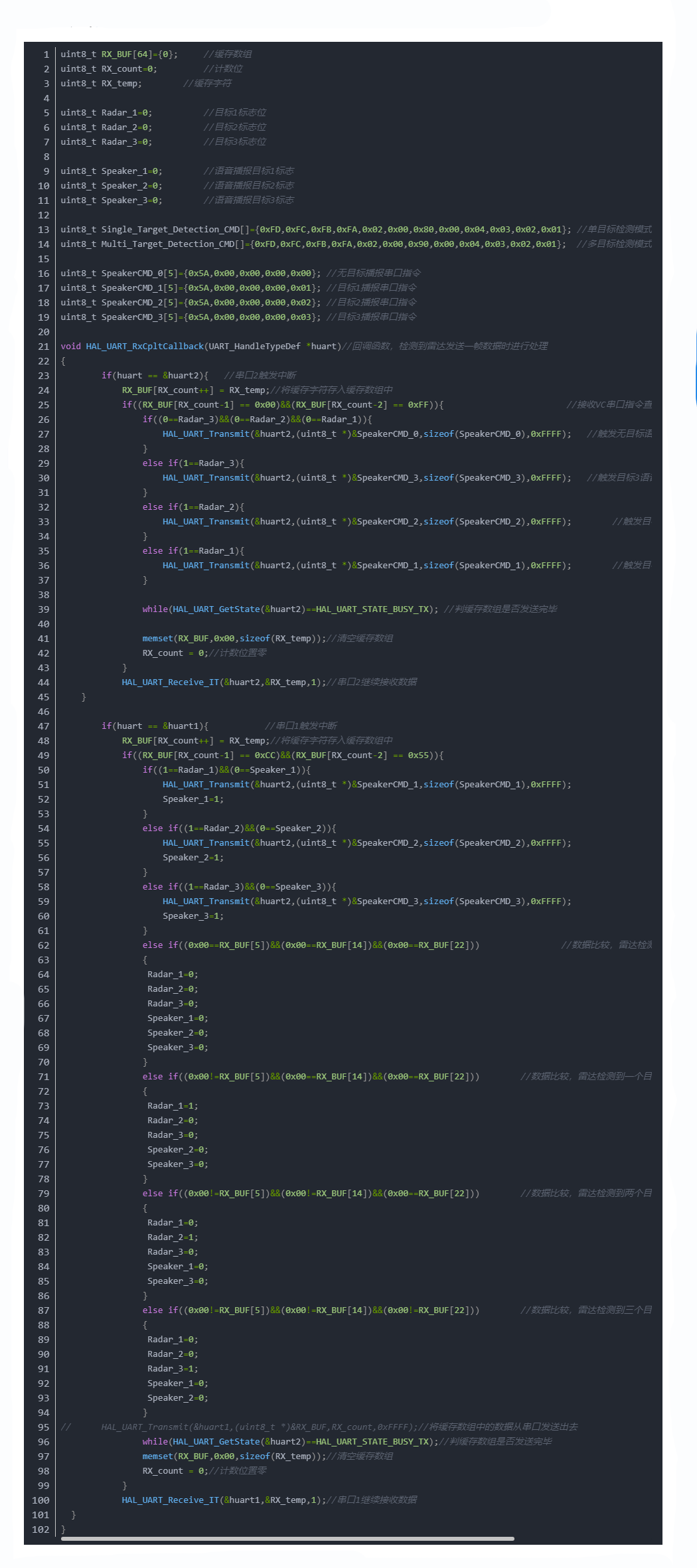
06、STM32数据处理
这里我是采取设置标志位的方式处理数据。为了防止在雷达数据下发过快时,语音一直重复播报的情况。
审核编辑 黄宇
-
检测
+关注
关注
5文章
4520浏览量
91835 -
串口
+关注
关注
14文章
1562浏览量
77232
发布评论请先 登录
相关推荐
24GHz轨迹跟踪雷达模组,可检测区域内人员位置、数量

LMX2595在8GH,12GHz, 24GHz都会产生杂散,为什么?
24G雷达模块LD2450 支持人体移动轨迹跟踪与手势识别

0.1mA!24GHz超低功耗人体存在毫米波雷达模组
可检测微动目标 24GHz人体感应雷达模块ME73MS01惊艳来袭!

高精度高性价比24GHz液位检测雷达模组
可进行精准测距、手势识别,24G高性能毫米波雷达模组Rd-03E
24GHz轨迹跟踪人体感应雷达模组,可检测区域内人员位置、数量
0 基础,0 难度,安信可Rd-03上位机配置教程
英飞凌BGT24LTR11N16:24GHz低功率雷达收发器
安信可毫米波雷达模组Rd-03E烧录教程汇总——附上常见波特率固件







 工商网监
工商网监
评论