 ISO 11898里CAN总线的基本特点与结构
ISO 11898里CAN总线的基本特点与结构
范围
ISO 11898-1主要描述了CAN总线的基本架构,定义了CAN在数据链路层的通信方式。重点内容是数据链路层的两个子层:逻辑链路控制(LLC)和介质访问控制(MAC)。
LLC和MAC工作使用很少接触,我理解的是把CAN比作一道菜的话,MAC是厨师,LLC是传菜员。
ISO 11898-1定义了两种CAN,经典CAN和CAN FD。
经典CAN:波特率最高1Mbit/s,数据场每帧可达8个字节。
CAN FD:波特率最高超过1Mbit/s,数据场每帧可超过8个字节。
其实这里说波特率不是特别准确,看单位就知道规范的说法是比特率或位速率,标准原文也是bit rates。1个波特表示一个符号,一个符号可以是多个bit组成,而1个比特就是一个bit,但口语大家都说波特率,也没有歧义,就这么用吧。
波特率达到1Mbit/s时,最大传输距离为40m。
CAN的基本特点
CAN有如下特点:
— 基于优先权的多主总线访问;
多主方式是指网络上的每一节点都可以发送信息,每一节点也都可以对某一信息的标识符进行检测。优先权是根据标识符的值判定,ID值越小,优先权越高。
— 基于内容的无损仲裁;
仲裁机制可以保证不会丢失信息,也不会浪费时间。
— 所有帧以广播方式传输;
每一节点发出信息,同一总线上的所有节点都可以选择接收该信息。
— 通过接收滤波进行多点传输;
接收器不判断是哪个节点发送的信息,而是通过帧接收滤波的方法判断该信息是否和接收器相关。发送也是一样。
— 支持远程数据请求;
某个节点通过发送远程帧,请求另一个节点向自己回应相应的数据帧,这个数据帧标识符和远程帧标识符相同。
— 配置灵活;
只要标识符数量够,可以不做软件或硬件的变更而增加节点。
— 全网内数据具有一致性;
某一帧可以同时被所有节点接收,也可以同时不被所有节点接收。
— 错误检测和错误通报;
总线数据校验,有多种方式。
— 自动重传仲裁失败、未被确认或在传输过程中被故障损坏的帧;
仲裁失败会在下次总线空闲期间自动重发。错误帧在恢复时间之后,如果未再出错,会被适时重发。
— 区分节点的临时故障和永久故障,以及自动关闭故障节点。
故障节点会被断开,会无法发送和无法接收任何帧。
CAN的消息帧
CAN在发送的时候,由LLC消息帧转换为MAC消息帧;CAN在接收的时候,由MAC消息帧转换为LLC消息帧。
LLC消息帧包括:标识符、格式化场、数据长度场、LLC数据场。
MAC消息帧包括:帧起始、仲裁场、控制场、数据场、循环冗余码校验场(CRC场)、应答场、帧结束。
一般好像只讨论发出的MAC消息帧。消息帧分4种:数据帧、远程帧、错误帧、超载帧。数据帧最常见,也最复杂,以此为例说明帧结构。
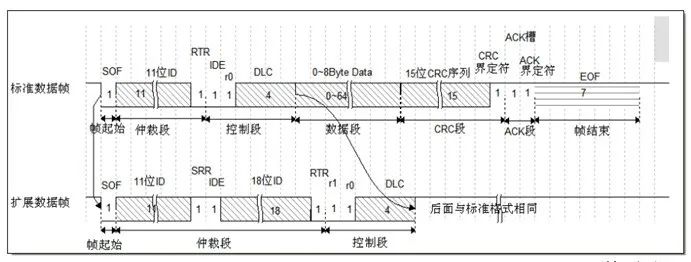
帧起始(SOF) :数据帧和远程帧的开始,只由一个显性位组成,并且只在总线空闲时发送。
仲裁场 :标准帧中由11位标识符(标识符编码从ID-28到ID-18)和RTR位组成;扩展帧中由29位标识符(标识符编码从ID-28到ID-18、ID-17到ID-0)、SRR位、IDE位和RTR位组成组成。
RTR位叫远程传输请求位,数据帧中RTR是显性电平,远程帧中RTR是隐性电平。
SRR位叫替代传输请求位,在扩展帧中始终是隐性电平。
IDE位叫标识符扩展位。标准帧也有IDE位,只不过是在控制场。IDE位在标准帧中是显性电平,在扩展帧中是隐性电平。
控制场 :总共6位。标准帧中,由IDE(显性)、r0(显性)和DLC组成;扩展帧中,由r1(显性)、r0(显性)和DLC组成。
DLC叫数据长度码,4位。DLC的值就是这一帧里数据场的长度。
数据场 :0~8个字节,存储着发送的数据,即这一帧想要传输的信息。
CRC场 :循环冗余码校验场,由CRC序列和CRC界定符组成。
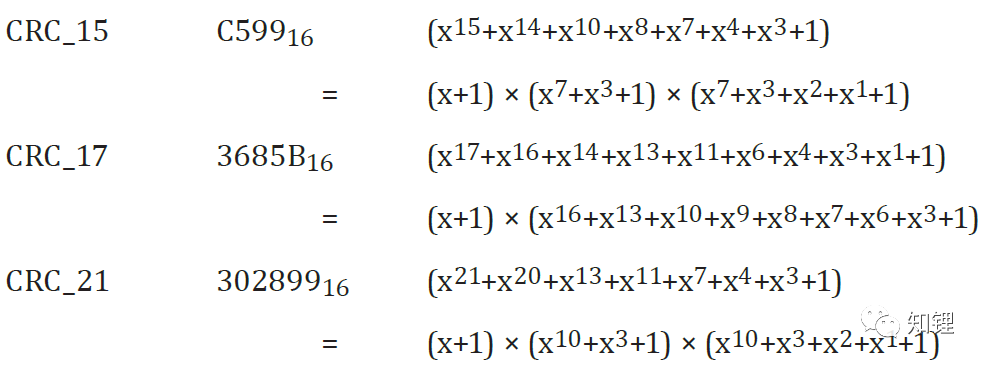
CRC序列是发送节点根据一个约定好的多项式算出来的校验码,这个多项式的系数根据这帧报文里的帧起始、仲裁场等数据确定。接收节点用同样的方式计算。如果两方算出来的校验码一致,则报文正常;不一致,则请求重新发送。
CRC_15用于经典CAN,CRC_17用于数据场不超过16个字节的CANFD,CRC_21用于数据场超过16个字节的CANFD。
CRC界定符算是一个分界线,经典CAN中为1个隐性位,CANFD中为1~2个隐性位。
应答场(ACK场) :总共2位,由ACK槽和ACK界定符组成,两个都是隐性位。
帧结束 :由7个隐性位组成。
其他3种消息帧与数据帧类似,只是结构不太一样。
远程帧由6个域组成:帧起始、仲裁场、控制场、CRC场、应答场和帧结束。
错误帧由错误标志和错误界定符组成。
超载帧由超载标志和超载界定符组成。
-
CAN总线
+关注
关注
145文章
1952浏览量
130830 -
接收器
+关注
关注
14文章
2473浏览量
71959 -
ACK
+关注
关注
0文章
28浏览量
11155 -
CRC校验
+关注
关注
0文章
84浏览量
15218 -
LLC电路
+关注
关注
1文章
43浏览量
7518
发布评论请先 登录
相关推荐
汽车CAN总线渗透测试

can总线stm32交通灯
ISO11898物理层特性
CAN协议的特点
CAN总线笔记 精选资料分享
CAN总线协议
CAN总线的原理是什么
CAN总线协议简介
CAN总线的基础知识
CAN总线应用常见问题






 工商网监
工商网监
评论