 AUTOSAR中CAN信号是如何触发COM回调的呢?
AUTOSAR中CAN信号是如何触发COM回调的呢?
在AUTOSAR中,COM模块提供了两种机制来处理接收到的PDU:ComRxPduCallout和ComNotification
在CAN驱动中,回调函数通常是通过中断或轮询的方式触发的。当CAN控制器接收或发送CAN数据帧时,CAN控制器会产生相应的中断或状态变化,在中断服务例程(ISR)中或轮询循环中,CAN驱动会调用相应的回调函数来处理这些CAN事件。
第一种回调,可以按照收到信号的顺序触发COM层的回调,因为收到的信号会存在fifo里,这就可以按照顺序触发。
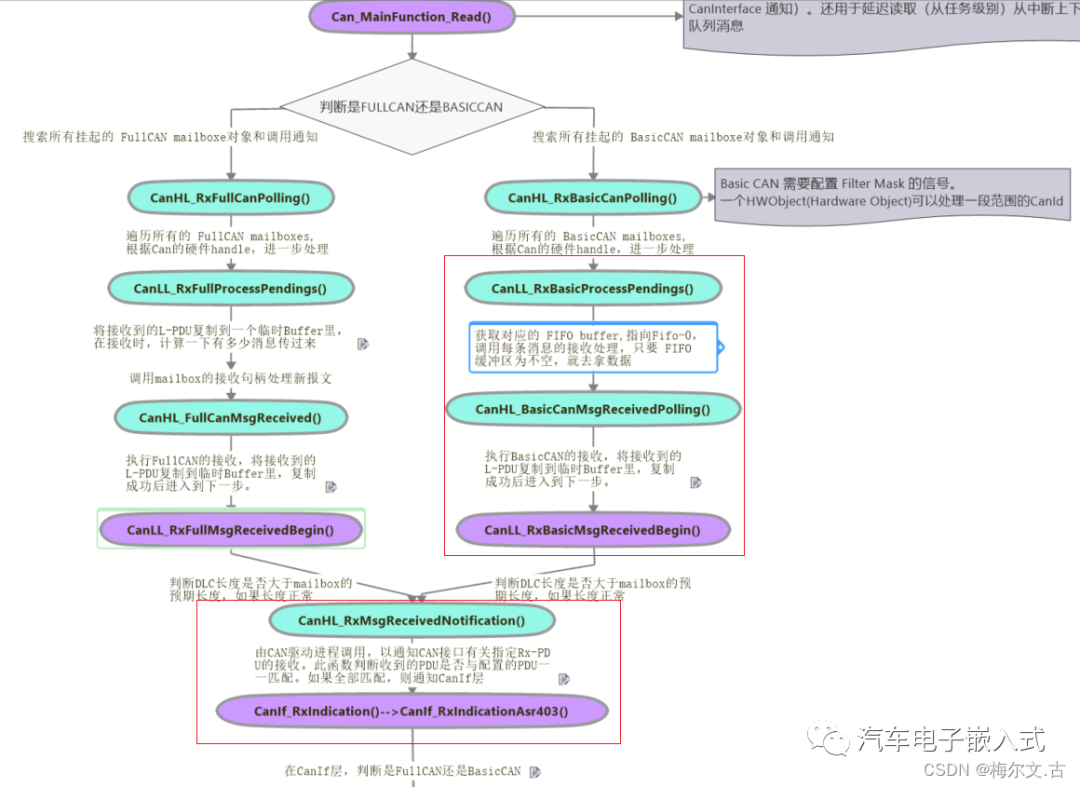
先说结论:当Can_MainFunction_Read 处理接收到的消息时,CanIf层将调用PduR层的PduR_CanIfRxIndication 函数。然后,PduR层将该消息路由到COM层,并调用Com_RxIndication 函数。最后,当COM层处理接收到的消息时,它将触发配置的回调函数。
为了在接收到CAN消息时触发COM层的回调,需要遵循以下步骤:
配置CanIf层:确保在CanIf层为接收到的CAN消息配置了相应的CanIfRxPdu。这包括为其指定一个PduId,并将其与期望的CAN ID 和数据长度相关联。
配置PduR层:在PduR层,创建一个路由从CanIf层到Com层。这可以通过在PduR中定义PduRRoutingPath并关联CanIf的PduId 和Com层的PduId 来实现。
配置COM层:在COM层,为接收到的CAN消息定义一个接收IPDU,并指定一个回调函数。这个回调函数将在接收到新消息时被调用。通常,回调函数在接收到消息后会对其进行处理,例如将数据传输到应用程序。

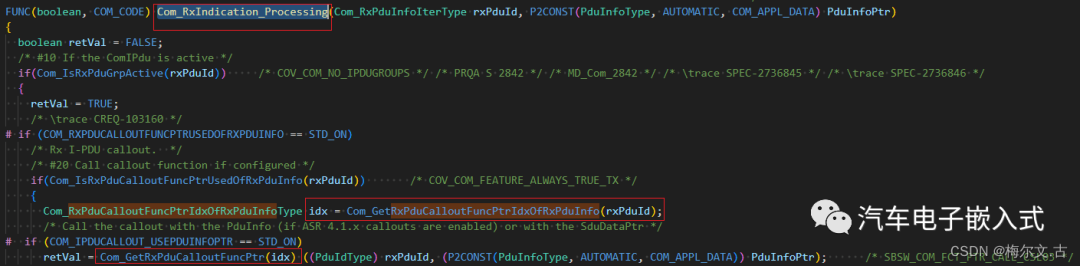
这种回调是通过COM收到CAN的PduID,遍历一个数组,之后根据返回的数字idx再去遍历回调数组,根据idx来判断要执行哪个回调,这个函数的执行是在 Com_RxIndication 里执行的。
通过davinci配置可以看出,CAN Controller中RXprocessing是polling模式,那么callout的回调触发是在polling模式下触发;

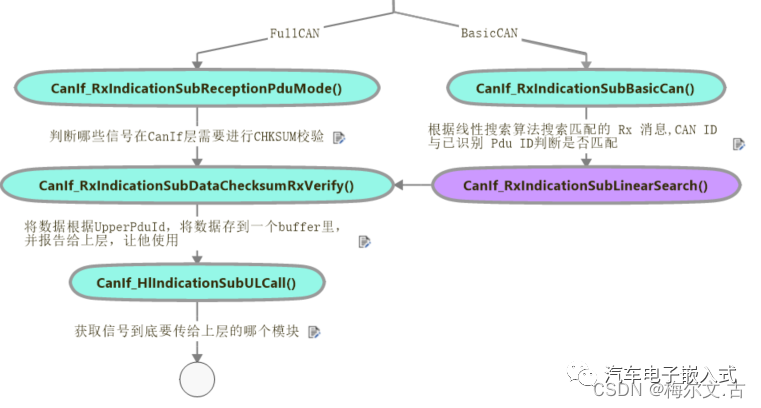
也就是调用的是下面这两个函数,注意根据配置要区分Basic CAN和Full CAN;

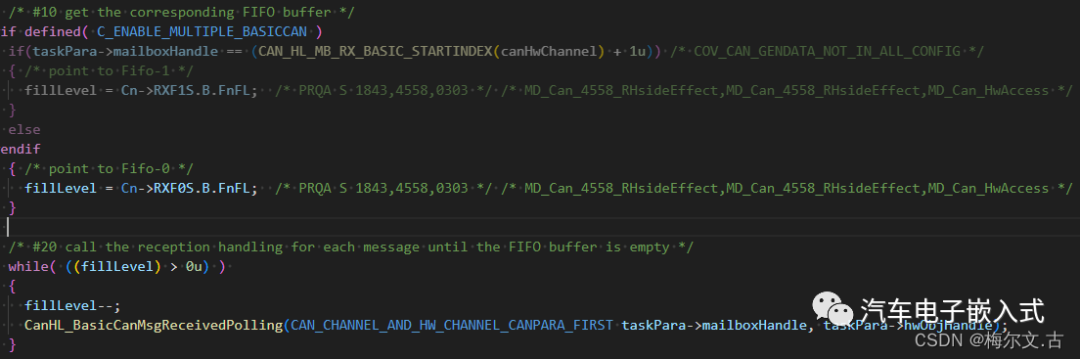
假设,现在进来的信号是通过Basic can进来的,在Polling模式下,Basic CAN模块是通过轮询CAN控制器中的接收缓冲区(mailBox)来接收CAN数据帧,【也就是如果是报文如果在FilterMask里的,数据可以通过CAN传给canif,否则,不管】

在这个过程中,当CAN控制器接收到一个CAN数据帧时,CAN控制器会将CAN数据帧存储在FIFO Buffer中。Basic CAN模块在轮询CAN控制器的接收缓冲区时,会从FIFO Buffer中读取CAN数据帧,并将CAN数据帧中的信号解析出来。解析后的信号将被传递到CanIf模块中,以便上层模块进行处理。
将接收到的CAN数据帧解析的信号传递到CanIf模块;
之后将数据在传到PDUR,之后在传到COM。

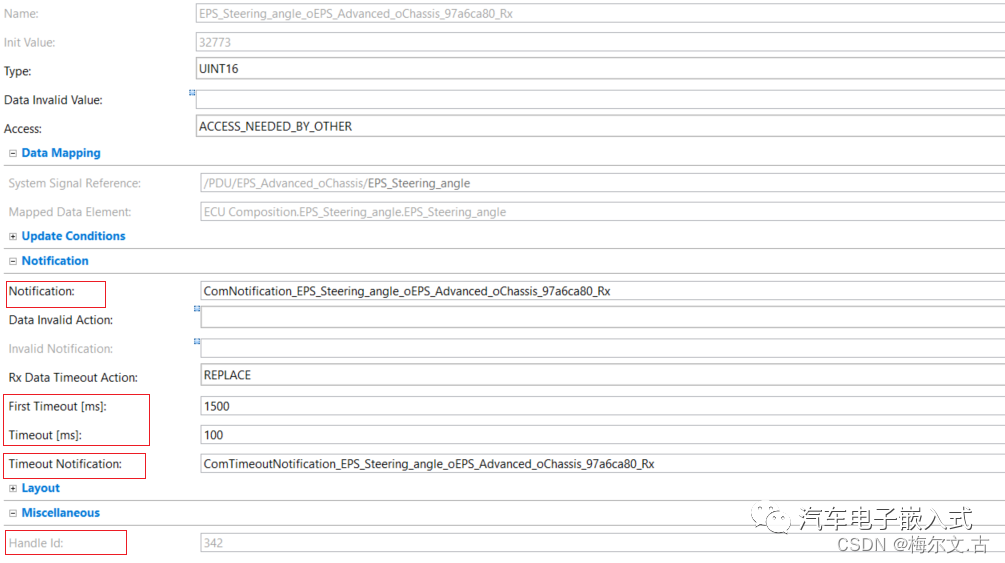
第二种回调,ComNotification是一个接口,用于通知上层模块有新的数据到达或数据发送完成。
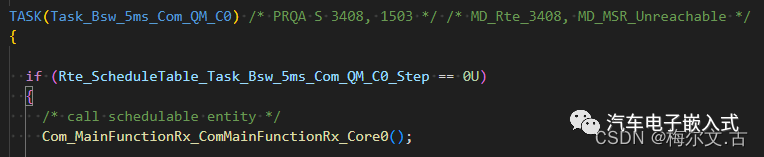
在代码中可以是通过一个TASK来循环执行 Com_MainFunctionRx 这个任务,Com_MainFunctionRx是一个COM模块的主任务函数,用于处理接收到的数据。当Com_MainFunctionRx函数接收到数据后,可以通过调用ComNotification来触发通知事件,通知上层应用程序进行处理。
当数据更新时,COM层会检查所有与该数据相关联的ComNotification,并将其标记为“待触发”。然后,COM层会在稍后的时间点触发已标记为“待触发”的ComNotification,并将相关的数据对象ID作为参数传递给应用程序。


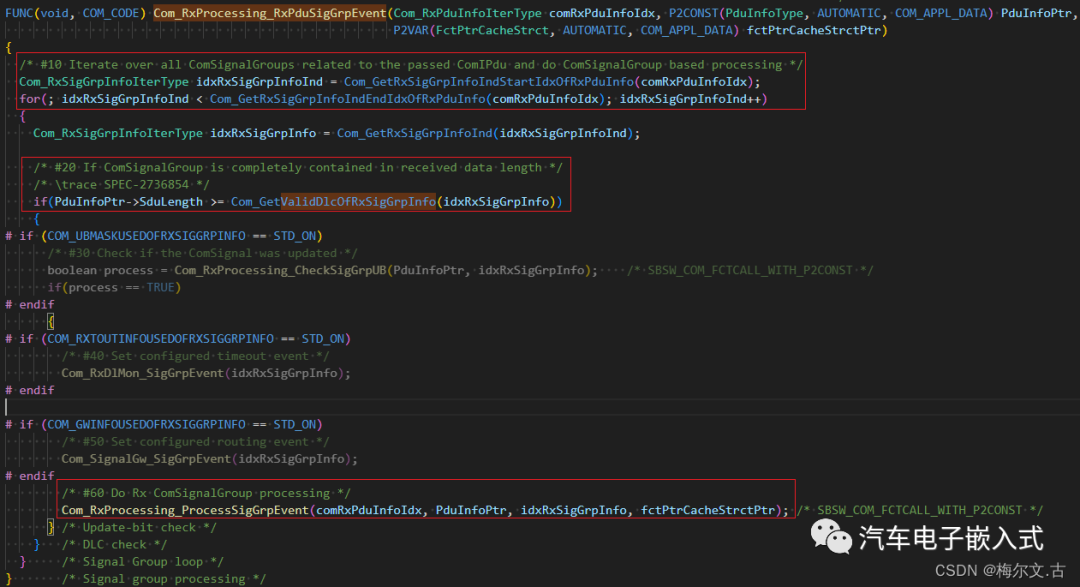
假设收到的是信号组,遍历所有COM收到的信号组,如果信号组的数据完整,就触发ComNotification的,进入到下一个处理。

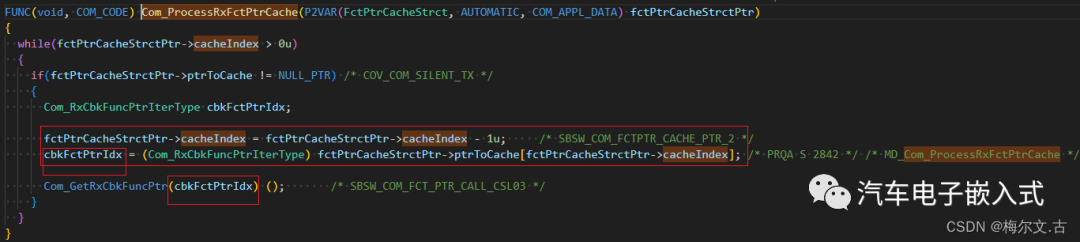
当Com接收到一个PDU时,它会根据配置选择是将PDU缓存起来还是直接调用应用程序提供的回调函数。如果选择了缓存,那么PDU将被缓存起来,并等待应用程序调用Com_ReceiveSignal或Com_ReceiveSignalGroup函数时进行处理;如果选择了直接调用回调函数,则会将PDU的数据传递给应用程序提供的回调函数进行处理。


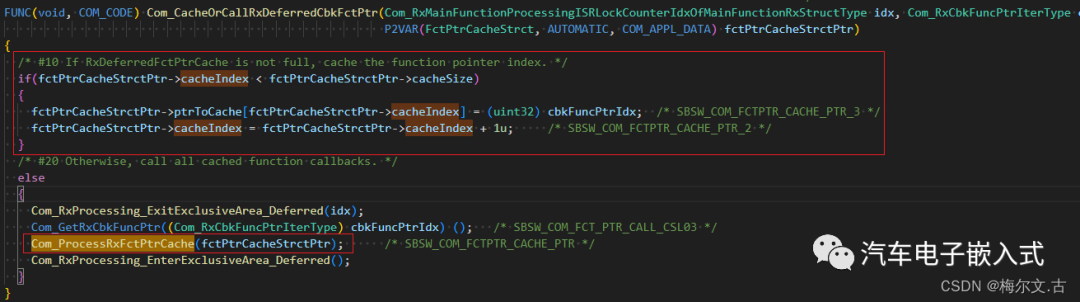
Com_CacheOrCallRxDeferredCbkFctPtr,用于缓存或调用接收到PDU时的回调函数。
当Com接收到一个PDU时,它会根据配置选择是将PDU缓存起来还是直接调用应用程序提供的回调函数。如果选择了缓存,那么回调函数的索引将被缓存起来,并等待应用程序调用Com_ReceiveSignal或Com_ReceiveSignalGroup函数时进行处理;如果选择了直接调用回调函数,则会将PDU的数据传递给应用程序提供的回调函数进行处理。
对比两种回调:
ComRxPduCallout的触发顺序可以按照接收到PDU的顺序进行,因为在处理每个PDU时,COM模块都会等待应用程序返回处理状态,然后再继续处理下一个PDU。因此,如果应用程序处理PDU的顺序与PDU到达的顺序相同,则ComRxPduCallout的回调也会按照PDU到达的顺序进行。
ComNotification是一种机制,允许应用程序在数据更新事件发生时执行自定义逻辑,并不要求应用程序返回状态值。当COM模块检测到数据更新事件时,它会对与更新事件相关联的数据对象注册的ComNotification进行回调,并将相关的数据对象ID作为参数传递给应用程序。ComNotification的触发顺序不能按照接收到PDU的顺序进行,因为在数据更新事件发生时,COM模块无法确定哪些数据对象会发生更新以及它们的更新顺序。
举例:
假设有两个节点A和B,它们之间通过CAN总线进行通信。节点A向节点B发送两个数据对象1和2。首先,节点A发送数据对象1,然后发送数据对象2,节点B按照接收到PDU的顺序先接收到了数据对象1,然后接收到了数据对象2。此时,如果节点B上的应用程序使用ComRxPduCallout来处理PDU,并且在处理PDU时需要访问其他节点发送的数据对象,那么ComRxPduCallout的回调顺序将按照节点发送的顺序进行。因此,节点B上的应用程序将按照1->2的顺序处理PDU,并且可以在处理PDU时访问先收到的数据对象1。
相反,如果节点B上的应用程序使用ComNotification来处理数据更新事件,并且在处理数据更新事件时需要访问其他节点发送的数据对象,那么ComNotification不一定按照节点发送顺序执行。例如,如果数据对象1和2之间存在依赖关系,并且在数据对象2更新前,数据对象1也会发生更新,那么节点2上的应用程序可能会在接收到数据对象2更新事件前先接收到数据对象1的更新事件。因此,节点B上的应用程序不能保证按照节点发送顺序执行,因为更新事件的顺序可能与节点发送顺序不同。
ComNotification的接收对象的依存关系是通过ComSignal的更新顺序来判断的。在标准的AUTOSAR架构中,ComSignal是一个最小的数据单元,用于在不同的ECU之间传输数据。ComSignal可以表示为一个信号,例如车速、转速等。ComSignal可以在ECU之间交换,也可以在ECU内部使用。每个ComSignal都可以拥有一个或多个ComSignalGroup,其中每个ComSignalGroup包含一组相关的ComSignal。这些ComSignal可以具有不同的数据类型、精度、单位和值范围。ComSignalGroup可以在ECU之间交换,也可以在ECU内部使用。
当一个ComSignal或ComSignalGroup的值发生变化时,ComNotification会将更新事件通知给所有已注册该ComSignal或ComSignalGroup的应用程序。应用程序可以在接收到更新事件时执行自定义逻辑。
ComNotification的接收对象的依存关系是基于ComSignal的更新顺序来判断的。如果多个ComSignal的更新顺序存在依赖关系,那么它们的接收对象之间也会存在依赖关系。例如,如果一个ComSignal的更新依赖于另一个ComSignal的更新,那么它们的接收对象之间也会存在依赖关系。在这种情况下,应用程序需要确保在接收到依赖的ComSignal的更新事件后再处理当前ComSignal的更新事件,以避免使用不一致的数据。
总之,ComNotification的接收对象的依存关系是基于ComSignal的更新顺序来判断的。如果多个ComSignal的更新顺序存在依赖关系,那么它们的接收对象之间也会存在依赖关系。应用程序需要确保在接收到依赖的ComSignal的更新事件后再处理当前ComSignal的更新事件,以避免使用不一致的数据。
审核编辑:刘清
-
接收机
+关注
关注
8文章
1179浏览量
53393 -
AUTOSAR
+关注
关注
10文章
350浏览量
21454 -
CAN控制器
+关注
关注
3文章
74浏览量
14997 -
回调函数
+关注
关注
0文章
87浏览量
11538
原文标题:AUTOSAR中CAN信号是如何触发COM回调的
文章出处:【微信号:汽车电子嵌入式,微信公众号:汽车电子嵌入式】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
STemWin中用到很多回调函数,这些回调函数是什么时候被触发的?
怎么通过rt_device_t判断是哪个串口触发的回调函数
CAN总线使用扩展ID触发FIFO回调怎么解决呢
CAN发送和串口发送是不是不能放在定时器的回调函数中?
怎么通过rt_device_t判断是那个串口触发的回调函数?
如何检测由未知CAN ID触发的中断信号?
AUTOSAR CAN时钟同步问题
C语言函数的回调函数
根据回调机制注册事件并处理回调VI
AutoSAR中CAN通信网络管理的概述






 工商网监
工商网监
评论