 研究人员开发柔软的人造感觉皮肤 可在大范围内准确确定物体的顺应性
研究人员开发柔软的人造感觉皮肤 可在大范围内准确确定物体的顺应性
人类皮肤非常复杂,包含一系列受体,通过触觉为我们提供有关环境的详细感官信息。其中一个独特功能是通过将来自皮肤受体的感觉信号与动觉反馈相结合,以感知物体的顺应性(即物体在压力下的变形能力)或柔软度。这使我们能够探知物体的特性,并执行医疗触诊等精细的任务。
相比之下,由于机器人的刚性结构,为其配备类似的触觉感知功能已被证明极具挑战性。
据麦姆斯咨询报道,瑞士洛桑理工学院(EPFL)的研究人员开发了一种柔软的人造感觉皮肤,能够在大范围内准确确定物体的顺应性。该研究成果已经以“Liquid Metal-Based Sensor Skin Enabling Haptic Perception of Softness”为题发表于Advanced Functional Materials期刊。
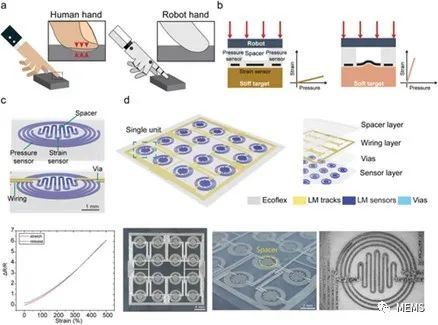
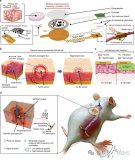
该研究所提出的传感器示意图
EPFL软生物电子接口实验室负责人、该研究负责人Stephanie Lacour解释道:“我们的目标是通过结合多模态软应变和压力传感器来模拟人类对柔软度的感知。其关键创新是解决软传感器和触摸物体之间的相互作用,这会影响传感器的响应。”
这种人造感觉皮肤由一层薄弹性体膜组成,其中嵌入了由液态金属微支架制成的电阻式压力和应变传感器。这些微小的液态金属“静脉”保持流动性,能够在不限制传感器的情况下发生较大的变形。其设计将螺旋图案的压力传感器与沿内部曲折路径的应变传感器相结合。这种紧凑的设计,是通过将液态金属喷涂到膜的两侧并利用它在层之间形成垂直通孔来实现的。
传感器单元的表征
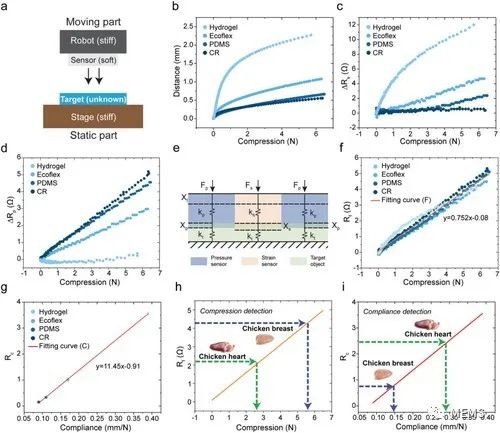
通过有限元建模,研究人员确定了物体相对于传感器的柔软度会影响其变形并改变传感器的输出。他们导出了一个分析模型,根据应变传感器数据来校准压力传感器,无论目标物体的性质如何,都可以准确计算顺应性。
这种人造感觉皮肤成功区分了橡胶、硅胶、水凝胶等材料以及鸡心和胸脯组织的顺应性。研究团队制作了一个4 x 4传感器阵列来测绘表面的一致性。这记录了物体的位置、接触面积和局部软/硬区域。这项技术可以帮助医疗机器人和先进假肢实现精密的传感任务。
Lacour解释称:“传统的刚性机器人变形非常小,因此检测表面变化受限。我们开发的这种人造皮肤可以像人类皮肤一样明显变形,通过协同多模态传感器实现高分辨率触觉感知。”
这项研究强调了传感器与物体的相互作用在软机器人和电子器件中的重要性,其中,触摸的材料会极大地影响响应。虽然目前的实验仅应用在相对简单的形状,但其基本方法可以扩展到更复杂的表面。
为机器人和假肢配备类似人类的触觉感知可以实现更智能、更灵巧的操作和交互。这种人造皮肤模仿了人类的柔软度感知,有望帮助实现触诊等精细的医疗操作,提高假肢装置的精度,并增强人机协作。
审核编辑:彭菁
-
传感器
+关注
关注
2550文章
51046浏览量
753132 -
机器人
+关注
关注
211文章
28390浏览量
206951 -
接口
+关注
关注
33文章
8580浏览量
151031
原文标题:基于液态金属的人造皮肤传感器,模拟人类的柔软度触觉感知
文章出处:【微信号:MEMSensor,微信公众号:MEMS】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
ad7124上电开启诊断结果,显示LDO不在范围内,是哪里出错了?
ADS1230怎么处理才能使信号在芯片量程范围内?
有没有推荐的方法或流程来校准AD7793,确保在100度到200度之间的测量准确?
柔软可拉伸的新型3D打印材料可改善可穿戴传感应用
如何确定时间继电器的延时范围
搞定电源完整性,不如先研究PDN!
如何在10uV误差允许范围内输出最低至几十微伏uV的交流方波信号?
一种可实现稳定压力传感的新型可拉伸电子皮肤
研究人员开发出高性能p型非晶氧化物半导体
Microsoft Copilot for Security(国际版)将于4月1日在全球范围内正式发布
接近传感电子皮肤研究进展综述
全植入无线触觉系统:仿生人造皮肤在伤口愈合与触觉恢复中的应用





 工商网监
工商网监
评论