 宋牧春: Linux内核内存corruption检查机制KASAN实现原理
宋牧春: Linux内核内存corruption检查机制KASAN实现原理
1. 前言
KASAN是一个动态检测内存错误的工具。KASAN可以检测全局变量、栈、堆分配的内存发生越界访问等问题。功能比SLUB DEBUG齐全并且支持实时检测。越界访问的严重性和危害性通过我之前的文章(SLUB DEBUG技术)应该有所了解。正是由于SLUB DEBUG缺陷,因此我们需要一种更加强大的检测工具。难道你不想吗?KASAN就是其中一种。
KASAN的使用真的很简单。但是我是一个追求刨根问底的人。仅仅止步于使用的层面,我是不愿意的,只有更清楚的了解实现原理才能更加熟练的使用工具。不止是KASAN,其他方面我也是这么认为。但是,说实话,写这篇文章是有点底气不足的。
因为从我查阅的资料来说,国内没有一篇文章说KASAN的工作原理,国外也是没有什么文章关注KASAN的原理。大家好像都在说How to use。由于本人水平有限,就根据现有的资料以及自己阅读代码揣摩其中的意思。本文章作为抛准引玉,如果有不合理的地方还请指正。
注:文章代码分析基于linux-4.15.0-rc3。
2. 简介
KernelAddressSANitizer(KASAN)是一个动态检测内存错误的工具。它为找到use-after-free和out-of-bounds问题提供了一个快速和全面的解决方案。KASAN使用编译时检测每个内存访问,因此您需要GCC 4.9.2或更高版本。
检测堆栈或全局变量的越界访问需要GCC 5.0或更高版本。目前KASAN仅支持x86_64和arm64架构(linux 4.4版本合入)。你使用ARM64架构,那么就需要保证linux版本在4.4以上。当然了,如果你使用的linux也有可能打过KASAN的补丁。
例如,使用高通平台做手机的厂商使用linux 3.18同样支持KASAN。
3. 如何使用
使用KASAN工具是比较简单的,只需要添加kernel以下配置项。
CONFIG_SLUB_DEBUG=y
CONFIG_KASAN=y
为什么这里必须打开SLUB_DEBUG呢?是因为有段时间KASAN是依赖SLUBU_DEBUG的,什么意思呢?就是在Kconfig中使用了depends on,明白了吧。
不过最新的代码已经不需要依赖了,可以看下提交。但是我建议你打开该选项,因为log可以输出更多有用的信息。重新编译kernel即可,编译之后你会发现boot.img(Android环境)大小大了一倍左右。
所以说,影响效率不是没有道理的。不过我们可以作为产品发布前的最后检查,也可以排查越界访问等问题。我们可以查看内核日志内容是否包含KASAN检查出的bugs信息。
4. KASAN是如何实现检测的?
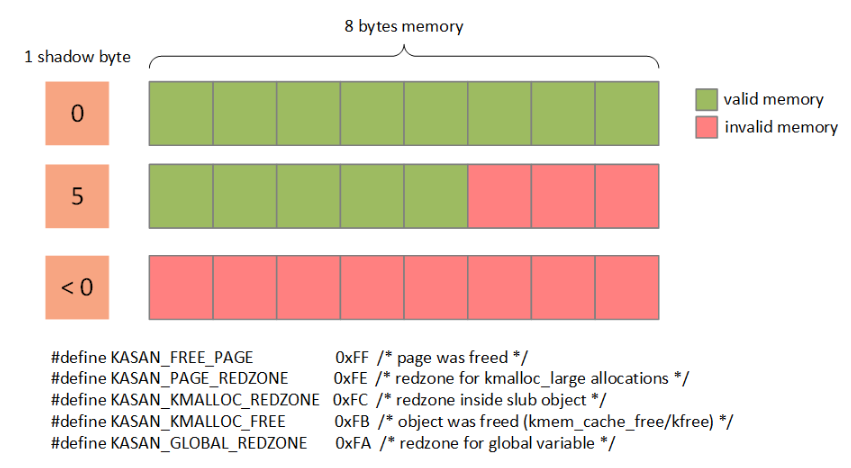
KASAN的原理是利用额外的内存标记可用内存的状态。这部分额外的内存被称作shadow memory(影子区)。KASAN将1/8的内存用作shadow memory。使用特殊的magic num填充shadow memory,在每一次load/store(load/store检查指令由编译器插入)内存的时候检测对应的shadow memory确定操作是否valid。
连续8 bytes内存(8 bytes align)使用1 byte shadow memory标记。如果8 bytes内存都可以访问,则shadow memory的值为0;如果连续N(1 =《 N 《= 7) bytes可以访问,则shadow memory的值为N;如果8 bytes内存访问都是invalid,则shadow memory的值为负数。
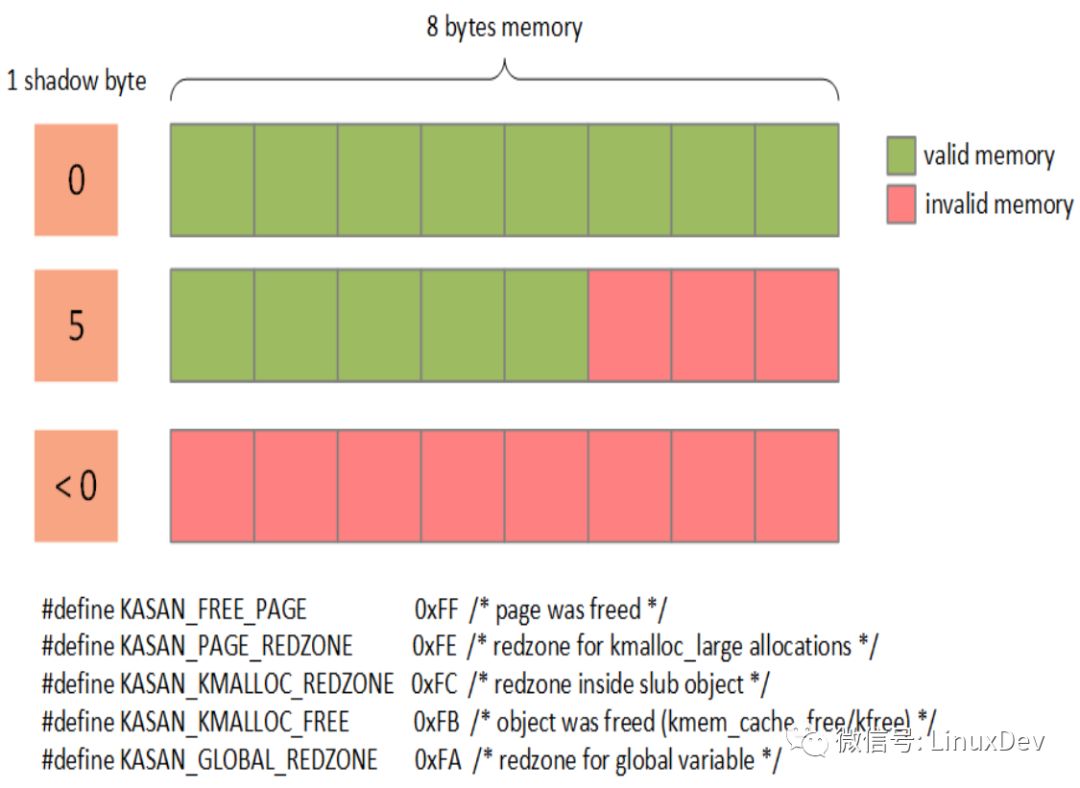
在代码运行时,每一次memory access都会检测对应的shawdow memory的值是否valid。这就需要编译器为我们做些工作。编译的时候,在每一次memory access前编译器会帮我们插入__asan_load##size()或者__asan_store##size()函数调用(size是访问内存字节的数量)。这也是要求更新版本gcc的原因,只有更新的版本才支持自动插入。
mov x0, #0x5678
movk x0, #0x1234, lsl #16
movk x0, #0x8000, lsl #32
movk x0, #0xffff, lsl #48
mov w1, #0x5
bl __asan_store1
strb w1, [x0]
上面一段汇编指令是往0xffff800012345678地址写5。在KASAN打开的情况下,编译器会帮我们自动插入bl __asan_store1指令,__asan_store1函数就是检测一个地址对应的shadow memory的值是否允许写1 byte。
蓝色汇编指令就是真正的内存访问。因此KASAN可以在out-of-bounds的时候及时检测。__asan_load##size()和__asan_store##size()的代码在mm/kasan/kasan.c文件实现。
4.1. 如何根据shadow memory的值判断内存访问操作是否valid?
shadow memory检测原理的实现主要就是__asan_load##size()和__asan_store##size()函数的实现。那么KASAN是如何根据访问的address以及对应的shadow memory的状态值来判断访问是否合法呢?首先看一种最简单的情况。访问8 bytes内存。
long *addr = (long *)0xffff800012345678;
*addr = 0;
以上代码是访问8 bytes情况,检测原理如下:
long *addr = (long *)0xffff800012345678;
char *shadow = (char *)(((unsigned long)addr 》》 3) + KASAN_SHADOW_OFFSE);
if (*shadow)
report_bug();
*addr = 0;
红色区域类似是编译器插入的指令。既然是访问8 bytes,必须要保证对应的shadow mempry的值必须是0,否则肯定是有问题。那么如果访问的是1,2 or 4 bytes该如何检查呢?也很简单,我们只需要修改一下if判断条件即可。修改如下:
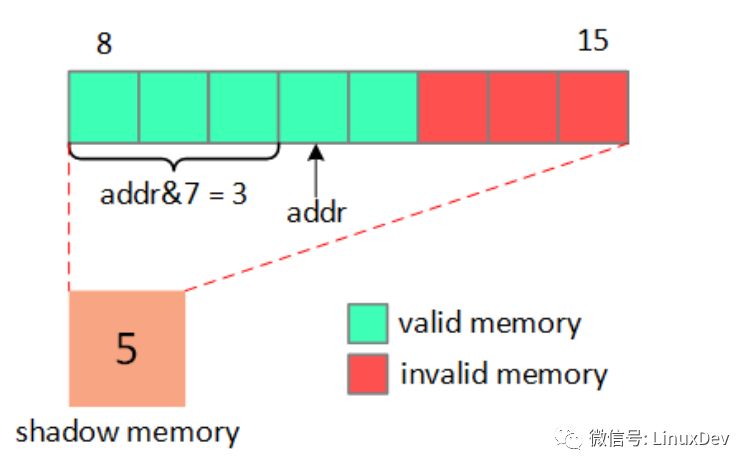
if (*shadow && *shadow 《 ((unsigned long)addr & 7) + N); //N = 1,2,4
如果*shadow的值为0代表8 bytes均可以访问,自然就不需要report bug。addr & 7是计算访问地址相对于8字节对齐地址的偏移。还是使用下图来说明关系吧。假设内存是从地址8~15一共8 bytes。对应的shadow memory值为5,现在访问11地址。那么这里的N只要大于2就是invalid。
4.2. shadow memory内存如何分配?
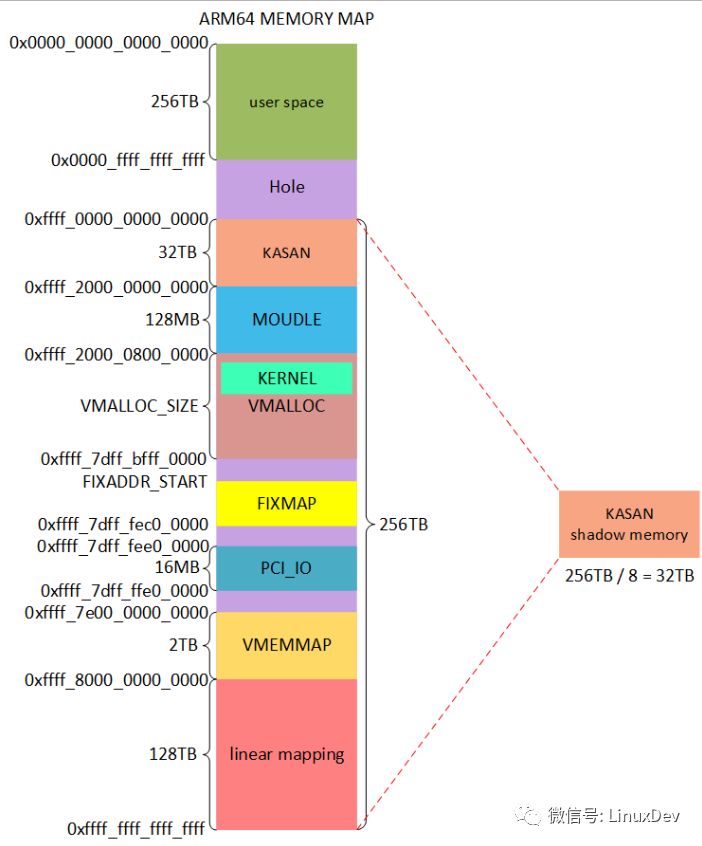
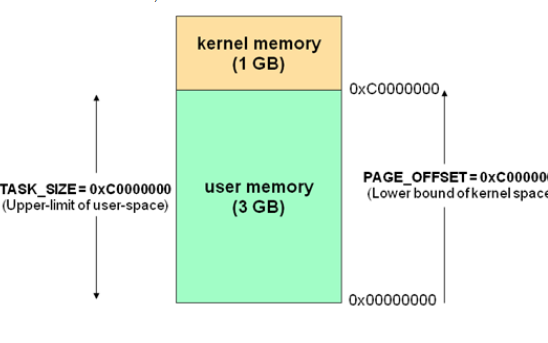
在ARM64中,假设VA_BITS配置成48。那么kernel space空间大小是256TB,因此shadow memory的内存需要32TB。我们需要在虚拟地址空间为KASAN shadow memory分配地址空间。所以我们有必要了解一下ARM64 memory layout。
基于linux-4.15.0-rc3的代码分析,我绘制了如下memory layout(VA_BITS = 48)。kernel space起始虚拟地址是0xffff_0000_0000_0000,kernel space被分成几个部分分别是KASAN、MODULE、VMALLOC、FIXMAP、PCI_IO、VMEMMAP以及linear mapping。其中KASAN的大小是32TB,正好是kernel space大小的1/8。不知道你注意到没有,KERNEL的位置相对以前是不是有所不一样。
你的印象中,KERNEL是不是位于linear mapping区域,这里怎么变成了VMALLOC区域?这里是Ard Biesheuvel提交的修改。主要是为了迎接ARM64世界的KASLR(which allows the kernel image to be located anywhere in the vmalloc area)的到来。
4.3. 如何建立shadow memory的映射关系?
当打开KASAN的时候,KASAN区域位于kernel space首地址处,从0xffff_0000_0000_0000地址开始,大小是32TB。shadow memory和kernel address转换关系是:shadow_addr = (kaddr 》》 3) + KASAN_SHADOW_OFFSE。
为了将[0xffff_0000_0000_0000, 0xffff_ffff_ffff_ffff]和[0xffff_0000_0000_0000, 0xffff_1fff_ffff_ffff]对应起来,因此计算KASAN_SHADOW_OFFSE的值为0xdfff_2000_0000_0000。我们将KASAN区域放大,如下图所示。
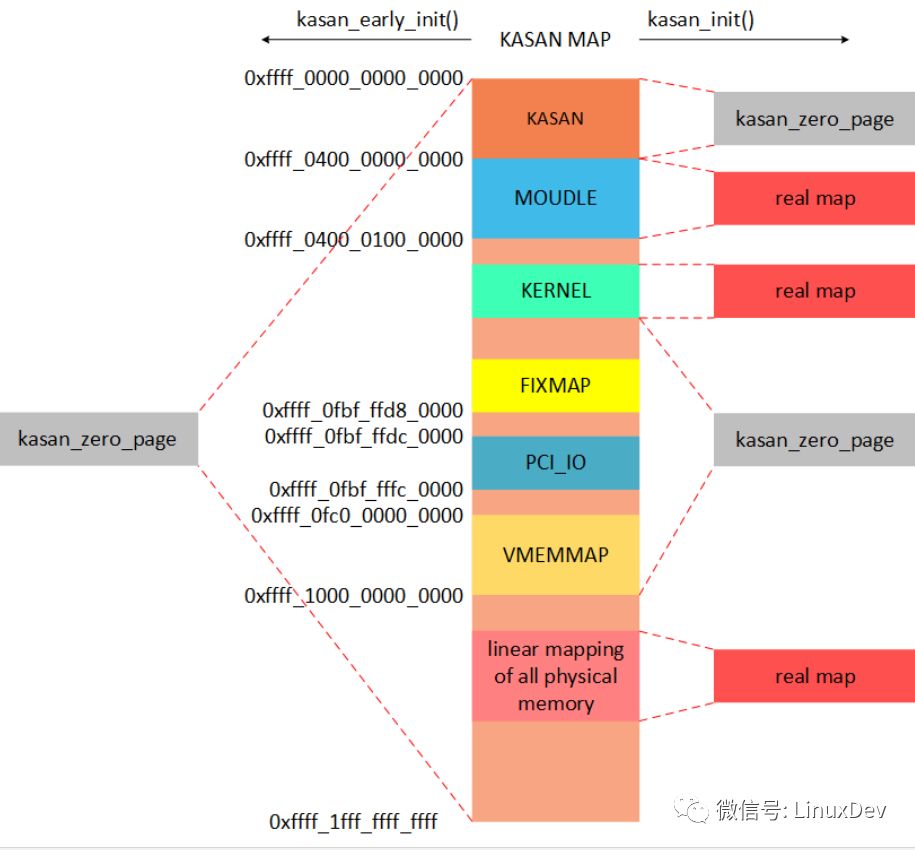
KASAN区域仅仅是分配的虚拟地址,在访问的时候必须建立和物理地址的映射才可以访问。上图就是KASAN建立的映射布局。左边是系统启动初期建立的映射。在kasan_early_init()函数中,将所有的KASAN区域映射到kasan_zero_page物理页面。因此系统启动初期,KASAN并不能工作。
右侧是在kasan_init()函数中建立的映射关系,kasan_init()函数执行结束就预示着KASAN的正常工作。我们将不需要address sanitizer功能的区域同样还是映射到kasan_zero_page物理页面,并且是readonly。
我们主要是检测kernel和物理内存是否存在UAF或者OOB问题。所以建立KERNEL和linear mapping(仅仅是所有的物理地址建立的映射区域)区域对应的shadow memory建立真实的映射关系。
MOUDLE区域对应的shadow memory的映射关系也是需要创建的,但是映射关系建立是动态的,他在module加载的时候才会去创建映射关系。
4.4. 伙伴系统分配的内存的shadow memory值如何填充?
既然shadow memory已经建立映射,接下来的事情就是探究各种内存分配器向shadow memory填充什么数据了。首先看一下伙伴系统allocate page(s)函数填充shadow memory情况。
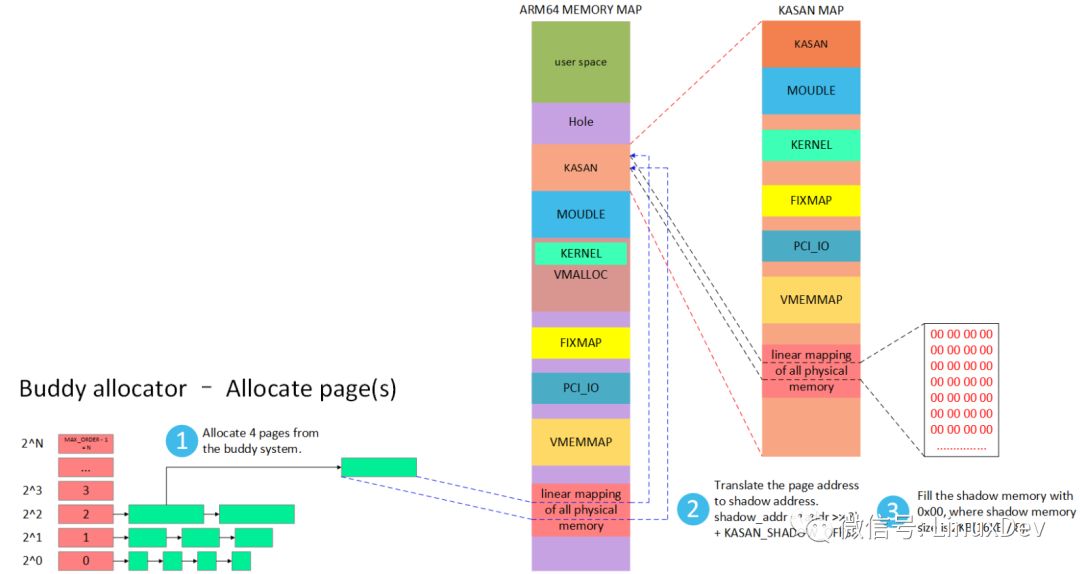
假设我们从buddy system分配4 pages。系统首先从order=2的链表中摘下一块内存,然后根据shadow memory address和memory address之间的对应的关系找对应的shadow memory。
这里shadow memory的大小将会是2KB,系统会全部填充0代表内存可以访问。
我们对分配的内存的任意地址内存进行访问的时候,首先都会找到对应的shadow memory,然后根据shadow memory value判断访问内存操作是否valid。
如果释放pages,情况又是如何呢?
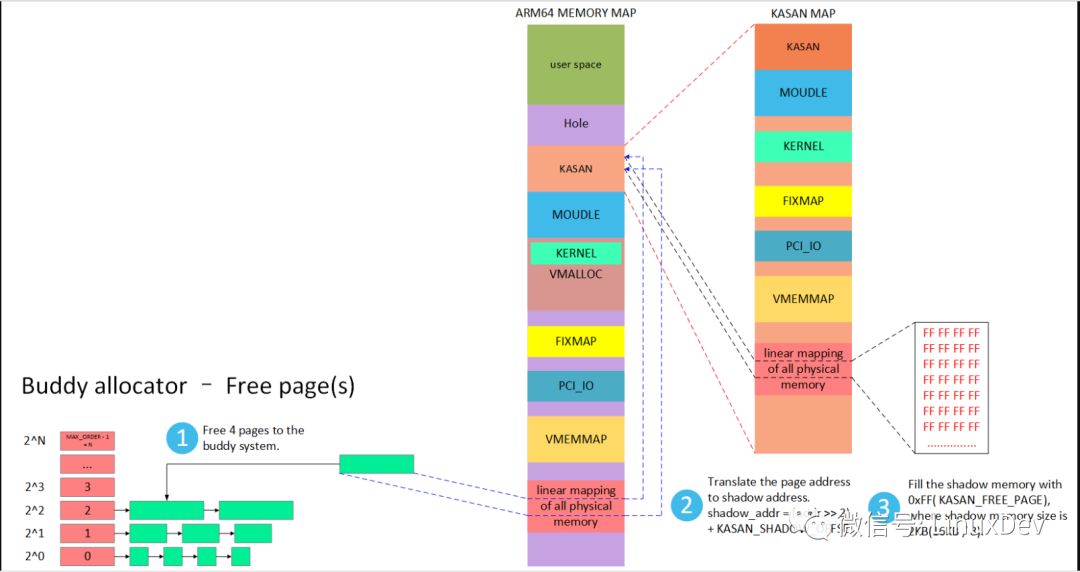
同样的,当释放pages的时候,会填充shadow memory的值为0xFF。如果释放之后,依然访问内存的话,此时KASAN根据shadow memory的值是0xFF就可以断,这是一个use-after-free问题。
4.5. SLUB分配对象的内存的shadow memory值如何填充?
当我们打开KASAN的时候,SLUB Allocator管理的object layout将会放生一定的变化。如下图所示。
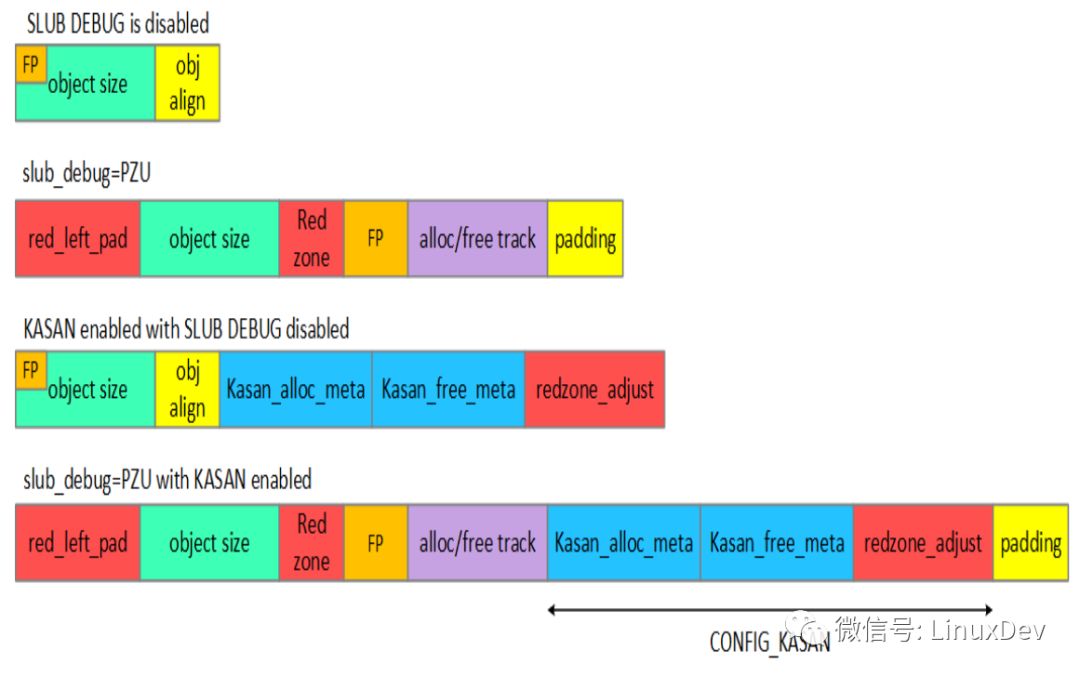
在打开SLUB_DEBUG的时候,object就增加很多内存,KASAN打开之后,在此基础上又加了一截。为什么这里必须打开SLUB_DEBUG呢?是因为有段时间KASAN是依赖SLUBU_DEBUG的,什么意思呢?就是在Kconfig中使用了depends on,明白了吧。不过最新的代码已经不需要依赖了,可以看下提交。
当我们第一次创建slab缓存池的时候,系统会调用kasan_poison_slab()函数初始化shadow memory为下图的模样。整个slab对应的shadow memory都填充0xFC。
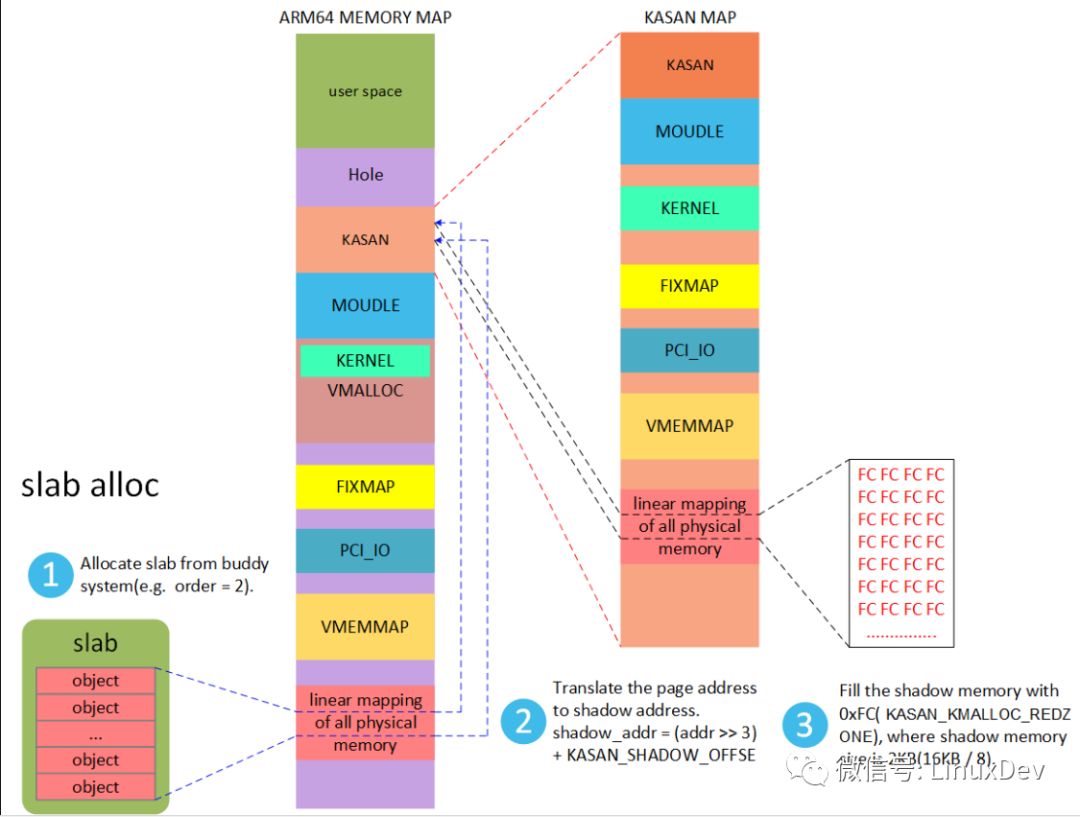
上述步骤虽然填充了0xFC,但是接下来初始化object的时候,会改变一些shadow memory的值。我们先看一下kmalloc(20)的情况。我们知道kmalloc()就是基于SLUB Allocator实现的,所以会从kmalloc-32的kmem_cache中分配一个32 bytes object。
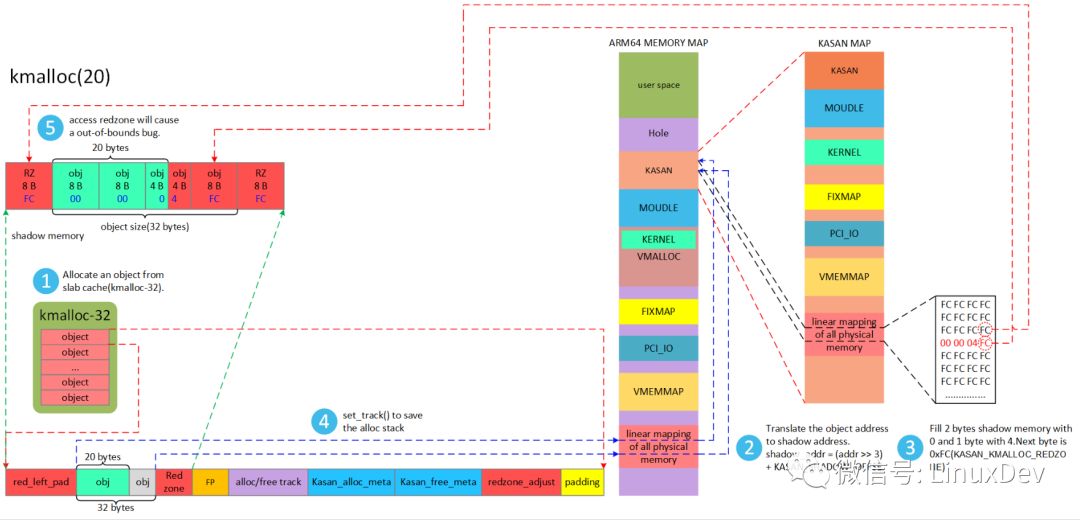
首先调用kmalloc(20)函数会匹配到kmalloc-32的kmem_cache,因此实际分配的object大小是32 bytes。KASAN同样会标记剩下的12 bytes的shadow memory为不可访问状态。
根据object的地址,计算shadow memory的地址,并开始填充数值。由于kmalloc()返回的object的size是32 bytes,由于kmalloc(20)只申请了20 bytes,剩下的12 bytes不能使用。KASAN必须标记shadow memory这种情况。
object对应的4 bytes shadow memory分别填充00 00 04 FC。00代表8个连续的字节可以访问。04代表前4个字节可以访问。
作为越界访问的检测的方法。总共加在一起是正好是20 bytes可访问。0xFC是Redzone标记。如果访问了Redzone区域KASAN就会检测out-of-bounds的发生。
当申请使用之后,现在调用kfree()释放之后的shadow memory情况是怎样的呢?看下图。
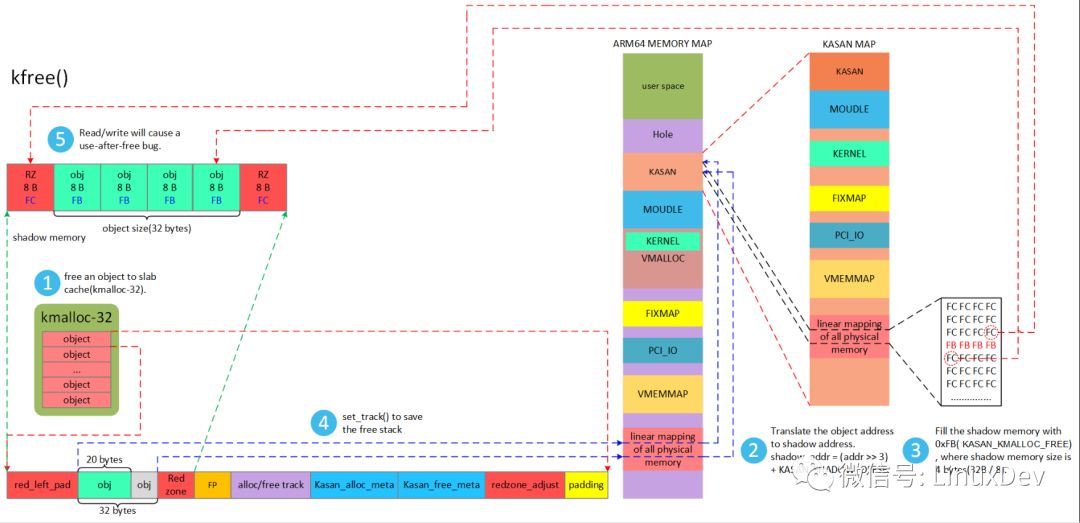
根据object首地址找到对应的shadow memory,32 bytes object对应4 bytes的shadow memory,现在填充0xFB标记内存是释放的状态。此时如果继续访问object,那么根据shadow memory的状态值既可以确定是use-after-free问题。
4.6. 全局变量的shadow memory值如何填充?
前面的分析都是基于内存分配器的,Redzone都会随着内存分配器一起分配。那么global variables如何检测呢?global variable的Redzone在哪里呢?这就需要编译器下手了。编译器会帮我们填充Redzone区域。例如我们定义一个全局变量a,编译器会帮我们填充成下面的样子。
char a[4];
转换
struct {
char original[4];
char redzone[60];
} a; //32 bytes aligned
如果这里你问我为什么填充60 bytes。其实我也不知道。这个转换例子也是从KASAN作者的PPT中拿过来的。估计要涉及编译器相关的知识,我无能为力了,但是下面做实验来猜吧。当然了,PPT的内容也需要验证才具有说服力。
尽信书则不如无书。我特地写三个全局变量来验证。发现System.map分配地址之间的差值正好是0x40。因此这里的确是填充60 bytes。 另外从我的测试发现,如果上述的数组a的大小是33的时候,填充的redzone就是63 bytes。
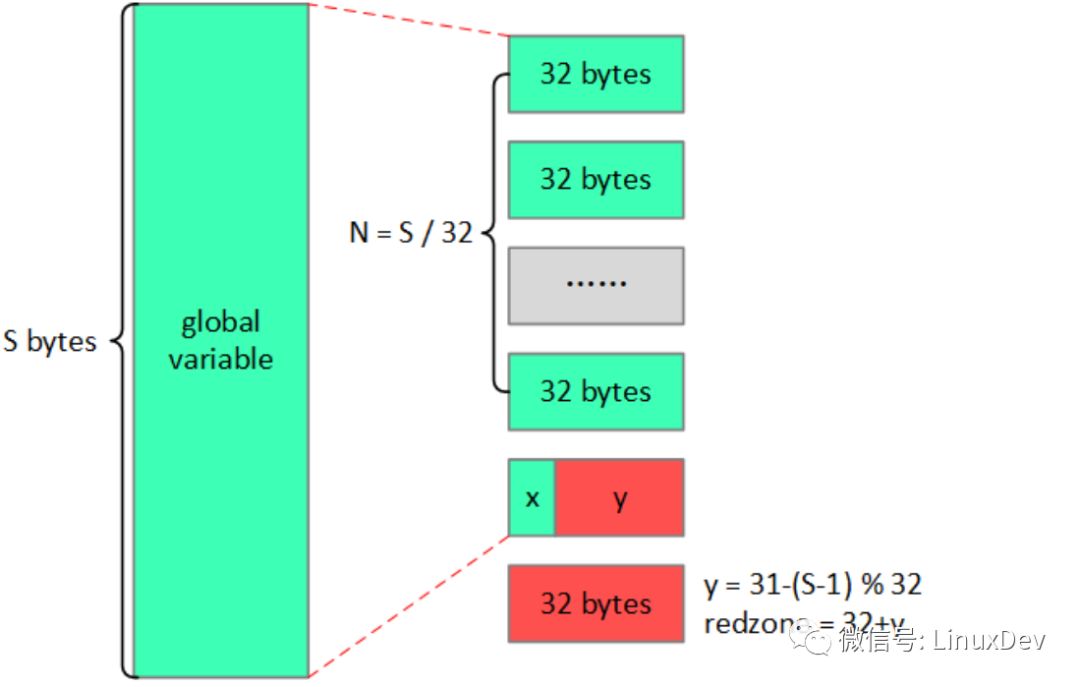
所以我推测,填充的原理是这样的。全局变量实际占用内存总数S(以byte为单位)按照每块32 bytes平均分成N块。假设最后一块内存距离目标32 bytes还差y bytes(if S%32 == 0,y = 0),那么redzone填充的大小就是(y + 32) bytes。画图示意如下(S%32 != 0)。
因此总结的规律是:redzone = 63 – (S - 1) % 32
全局变量redzone区域对应的shadow memory是在什么填充的呢?又是如何调用的呢?这部分是由编译器帮我们完成的。编译器会为每一个全局变量创建一个函数,函数名称是:_GLOBAL__sub_I_65535_1_##global_variable_name。
这个函数中通过调用__asan_register_globals()函数完成shadow memory标记。并且将自动生成的这个函数的首地址放在.init_array段。
在kernel启动阶段,通过以下代调用关系最终调用所有全局变量的构造函数。kernel_init_freeable()-》do_basic_setup() -》do_ctors()。do_ctors()代码实现如下:
static void __init do_ctors(void)
{
ctor_fn_t *fn = (ctor_fn_t *) __ctors_start;
for (; fn 《 (ctor_fn_t *) __ctors_end; fn++)
(*fn)();
}
这里的代码意思对于轻车熟路的你再熟悉不过了吧。因为内核中这么搞的太多了。便利__ctors_start和__ctors_end之间的所有数据,作为函数地址进行调用,即完成了所有的global variables的shadow memory初始化。
我们可以从链接脚本中知道__ctors_start和__ctors_end的意思。 #define KERNEL_CTORS() 。 = ALIGN(8);
VMLINUX_SYMBOL(__ctors_start) = 。;
KEEP(*(.ctors))
KEEP(*(SORT(.init_array.*)))
KEEP(*(.init_array))
VMLINUX_SYMBOL(__ctors_end) = 。; 上面说了这么多,不知道你是否产生了疑心?怎么都是猜啊!猜的能准确吗?
是的,我也这么觉得。是骡子是马,拉出来溜溜呗!现在用事实说话。首先我创建一个c文件drivers/input/smc.c。在smc.c文件中创建3个全局变量如下:

然后就随便使用吧!编译kernel,我们先看看System.map文件中,3个全局变量分配的地址。 ffff200009f540e0 B smc_num1 ffff200009f54120 B smc_num2 ffff200009f54160 B smc_num3 还记得上面说会有一个形如_GLOBAL__sub_I_65535_1_##global_variable_name的函数吗?
在System.map文件文件中,我看到了_GLOBAL__sub_I_65535_1_smc_num1符号。但是没有smc_num2和smc_num3的构造函数。你是不是很奇怪,不是每一个全局变量都会创建一个类似的构造函数吗?
马上为你揭晓。我们先执行aarch64-linux-gnu-objdump –s –x –d vmlinux 》 vmlinux.txt命令得到反编译文件。
现在好多重要的信息在vmlinux.txt。现在主要就是查看vmlinux.txt文件。先看一下_GLOBAL__sub_I_65535_1_smc_num1函数的实现。
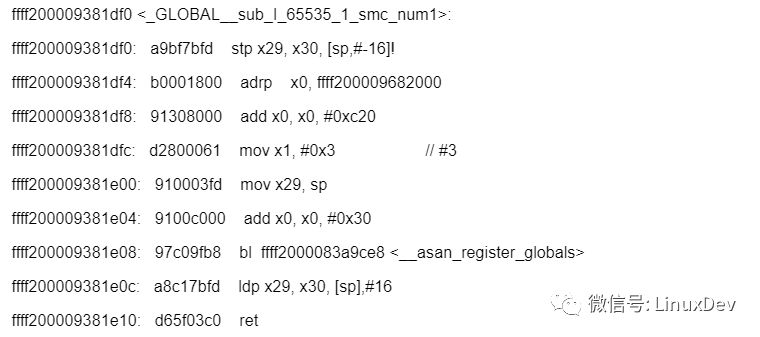
汇编和C语言传递参数在ARM64平台使用的是x0~x7。通过上面的汇编计算一下,x0=0xffff200009682c50,x1=3。然后调用__asan_register_globals()函数,x0和x1就是传递的参数。我们看一下__asan_register_globals()函数实现。
void __asan_register_globals(struct kasan_global *globals, size_t size)
{
int i;
for (i = 0; i 《 size; i++)
register_global(&globals[i]);
}
size是3就是要初始化全局变量的个数,所以这里只需要一个构造函数即可。一次性将3个全局变量全部搞定。这里再说一点猜测吧!我猜测是以文件为单位编译器创建一个构造函数即可,将本文件全局变量一次性全部打包初始化。第一个参数globals是0xffff200009682c50,继续从vmlinux.txt中查看该地址处的数据。struct kasan_global是编译器帮我们自动创建的结构体,每一个全局变量对应一个struct kasan_global结构体。struct kasan_global结构体存放的位置是.data段,因此我们可以从.data段查找当前地址对应的数据。数据如下:
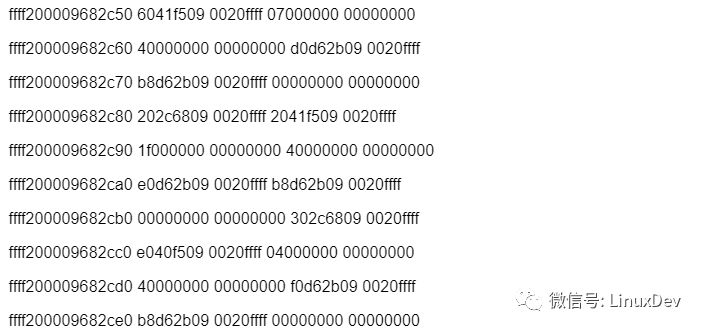
首先ffff200009682c50对应的第一个数据6041f509 0020ffff,这是个啥?其实是一个地址数据,你是不是又疑问了,ARM64的kernel space地址不是ffff开头吗?这个怎么60开头?其实这个地址数据是反过来的,你应该从右向左看。这个地址其实是ffff200009f54160。这不正是smc_num3的地址嘛!解析这段数据之前需要了解一下struct kasan_global结构体。
/* The layout of struct dictated by compiler */
struct kasan_global {
const void *beg; /* Address of the beginning of the global variable. */
size_t size; /* Size of the global variable. */
size_t size_with_redzone; /* Size of the variable + size of the red zone. 32 bytes aligned */
const void *name;
const void *module_name; /* Name of the module where the global variable is declared. */
unsigned long has_dynamic_init; /* This needed for C++ */
#if KASAN_ABI_VERSION 》= 4
struct kasan_source_location *location;
#endif
};
第一个成员beg就是全局变量的首地址。跟上面的分析一致。第二个成员size从上面数据看出是7,正好对应我们定义的smc_num3[7],正好7 bytes。
size_with_redzone的值是0x40,正好是64。根据上面猜测redzone=63-(7-1)%32=57。加上size正好是64,说明之前猜测的redzone计算方法没错。name成员对应的地址是ffff2000092bd6d0。看下ffff2000092bd6d0存储的是什么。

所以name就是全局变量的名称转换成字符串。同样的方式得到module_name的地址是ffff2000092bd6b8。继续看看这段地址存储的数据。

一目了然,module_name是文件的路径。has_dynamic_init的值就是0,这是C++需要的。我用的GCC版本是5.0左右,所以这里的KASAN_ABI_VERSION=4。
这里location成员的地址是ffff200009682c20,继续追踪该地址的数据。 ffff200009682c20 b8d62b09 0020ffff 0e000000 0f000000 解析这段数据之前要先了解struct kasan_source_location结构体。
/* The layout of struct dictated by compiler */
struct kasan_source_location {
const char *filename;
int line_no;
int column_no;
};
第一个成员filename地址是ffff2000092bd6b8和module_name一样的数据。剩下两个数据分别是14和15,分别代表全局变量定义地方的行号和列号。现在回到上面我定义变量的截图,仔细数数列号是不是15,行号截图中也有哦!特地截出来给你看的。
剩下的struct kasan_global数据就是smc_num1和smc_num2的数据。分析就不说了。前面说_GLOBAL__sub_I_65535_1_smc_num1函数会被自动调用,该地址数据填充在__ctors_start和__ctors_end之间。
现在也证明一下观点。先从System.map得到符号的地址数据。 ffff2000093ac5d8 T __ctors_start ffff2000093ae860 T __ctors_end 然后搜索一下_GLOBAL__sub_I_65535_1_smc_num1的地址ffff200009381df0被存储在什么位置,记得搜索的关键字是f01d3809 0020ffff。
ffff2000093ae0c0 f01d3809 0020ffff 181e3809 0020ffff 可以看出ffff2000093ae0c0地址处存储着_GLOBAL__sub_I_65535_1_smc_num1函数地址。这个地址不是正好位于__ctors_start和__ctors_end之间嘛!
现在就剩下__asan_register_globals()函数到底是是怎么初始化shadow memory的呢?以char a[4]为例,如下图所示
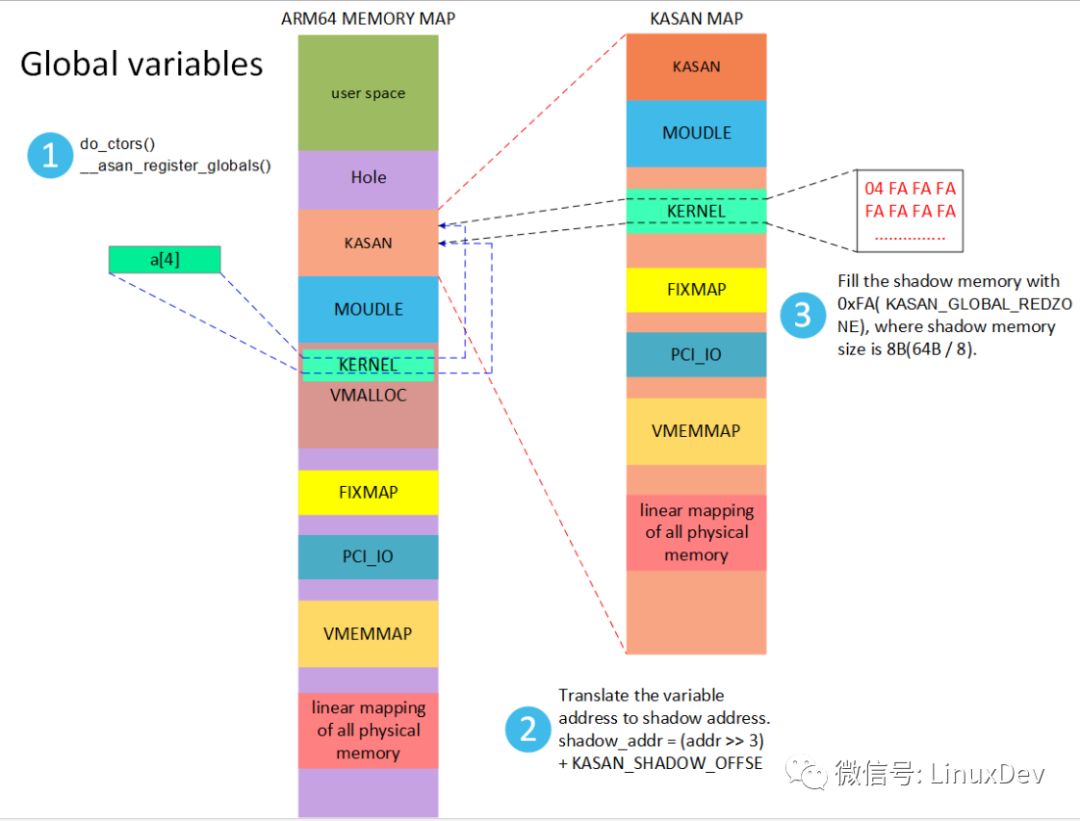
a[4]只有4 bytes可以访问,所以对应的shadow memory的第一个byte值是4,后面的redzone就填充0xFA作为越界检测。a[4]只有4 bytes可以访问,所以对应的shadow memory的第一个byte值是4,后面的redzone就填充0xFA作为越界检测。因为这里是全局变量,因此分配的内存区域位于kernel区域。
4.7. 栈分配变量的readzone是如何分配的?
从栈中分配的变量同样和全局变量一样需要填充一些内存作为redzone区域。下面继续举个例子说明编译器怎么填充。首先来一段正常的代码,没有编译器的插手。
void foo()
{
char a[328];
}
再来看看编译器插了哪些东西进去。
void foo() {
char rz1[32];
char a[328];
char rz2[56];
int *shadow = (&rz1 》》 3)+ KASAN_SHADOW_OFFSE;
shadow[0] = 0xffffffff;
shadow[11] = 0xffffff00;
shadow[12] = 0xffffffff; ------------使用完毕--------------
shadow[0] = shadow[11] = shadow[12] = 0; }
红色部分是编译器填充内存,rz2是56,可以根据上一节全局变量的公式套用计算得到。但是这里在变量前面竟然还有32 bytes的rz1。这个是和全局变量的不同,我猜测这里是为了检测栈变量左边界越界问题。
蓝色部分代码也是编译器填充,初始化shadow memory。栈的填充就没有探究那么深入了,有兴趣的读者可以自己探究。
5. Error log信息包含哪些信息?
从kernel的Documentation文档找份典型的KASAN bug输出的log信息如下。
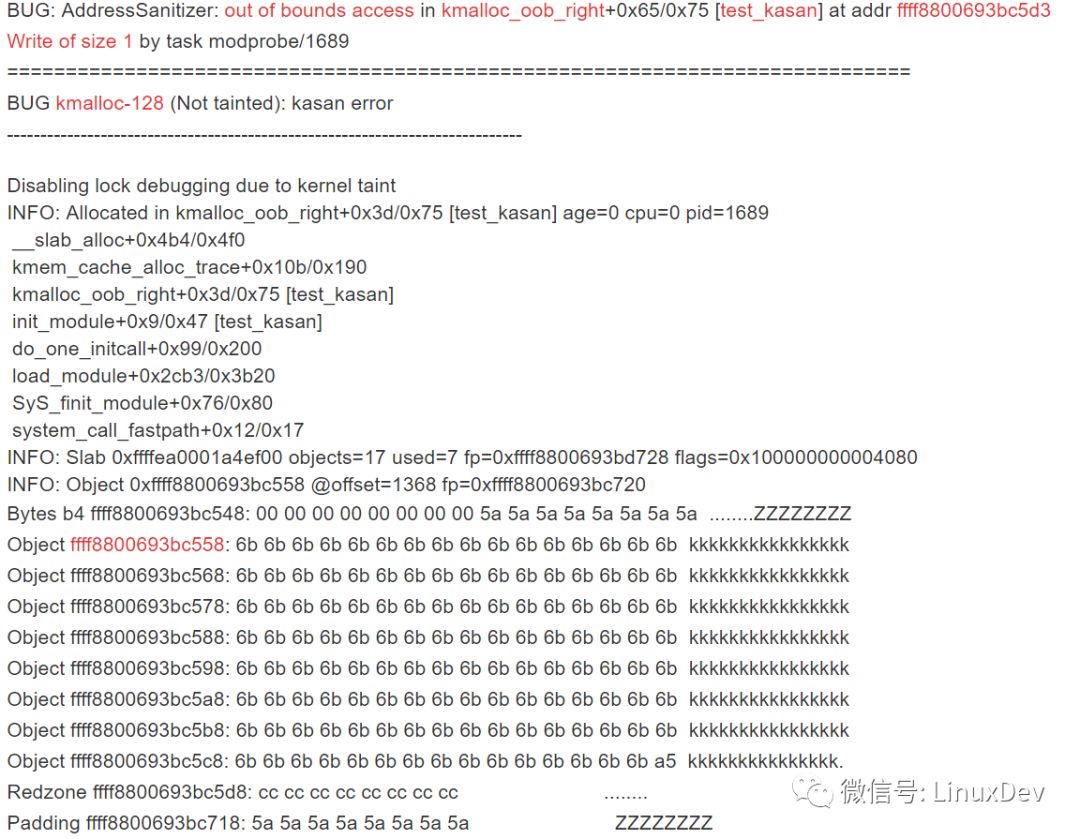
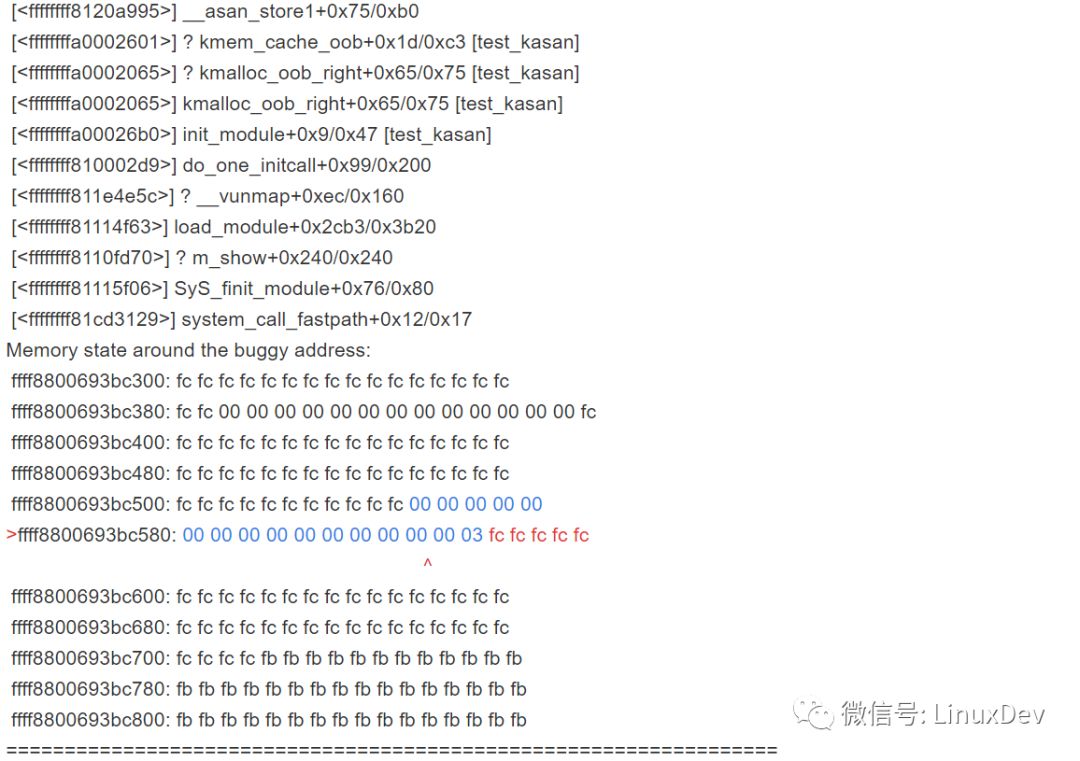
输出的信息很丰富,包含了bug发生的类型、SLUB输出的object内存信息、Call Trace以及shadow memory的状态值。其中红色信息都是比较重要的信息。我没有写demo历程,而是找了一份log信息,不是我想偷懒,而是锻炼自己。怎么锻炼呢?我想问的是,从这份log中你可以推测代码应该是怎么样的?我可以得到一下信息:
1) 程序是通过kmalloc接口申请内存的;
2) 申请的内存大小是123 bytes,即p = kamlloc(123);
3) 代码中类似往p[123]中写1 bytes导致越界访问的bug;
4) 在3)步骤发生前没有任何的对该内存的写操作; 如果你也能得到以上4点猜测,我觉的我写的这几篇文章你是真的看明白了。
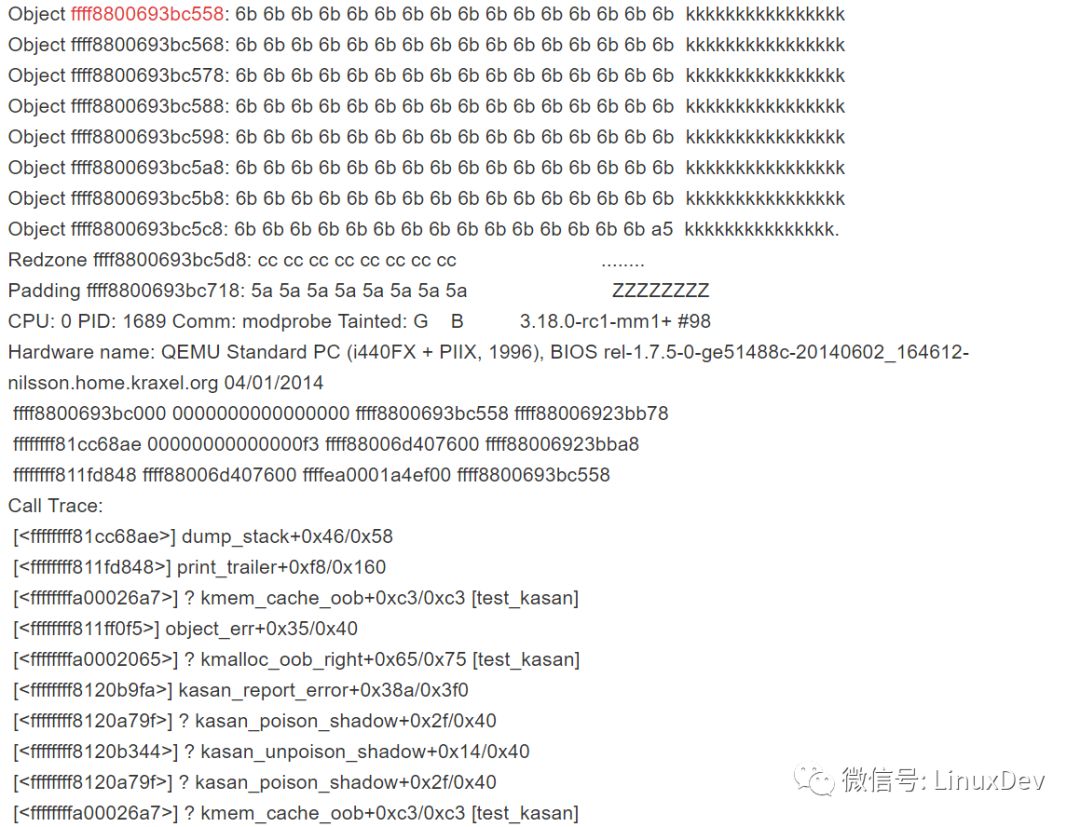
首先输出信息是有SLUB的信息,所以应该是通过kmalloc()接口;在打印的shadow memory的值中,我们看到连续的15个0和一个3,所以申请的内存size就是15x8+3=123;由于是往ffff8800693bc5d3地址写1个字节,并且object首地址是ffff8800693bc558,所以推测是往p[123]写1 byte出问题;由于log中将object中所有的128 bytes数据全部打印出来,一共是127个0x6b和一个0xa5(SLUB DEBUG文章介绍的内容)。
所以我推测在3)步骤发生前没有任何的对该内存的写操作。
-
内核
+关注
关注
3文章
1372浏览量
40294 -
Linux
+关注
关注
87文章
11306浏览量
209569 -
堆栈
+关注
关注
0文章
182浏览量
19767
原文标题:宋牧春: Linux内核内存corruption检查机制KASAN实现原理
文章出处:【微信号:LinuxDev,微信公众号:Linux阅码场】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
内存管理之KASAN的工作原理
走进Linux内存系统探寻内存管理的机制和奥秘
Linux内核地址映射模型与Linux内核高端内存详解

linux内核rcu机制详解

linux内核oom机制分析

高端内存的详解:linux用户空间与内核空间
你了解过Linux内核中的Device Mapper 机制?
可以了解并学习Linux 内核的同步机制

Linux内核实现内存管理的基本概念
Linux内核KASAN实现原理详解






 工商网监
工商网监
评论