 西门子1200PLC与海康机器人SC2000系列视觉传感器顺畅连接
西门子1200PLC与海康机器人SC2000系列视觉传感器顺畅连接
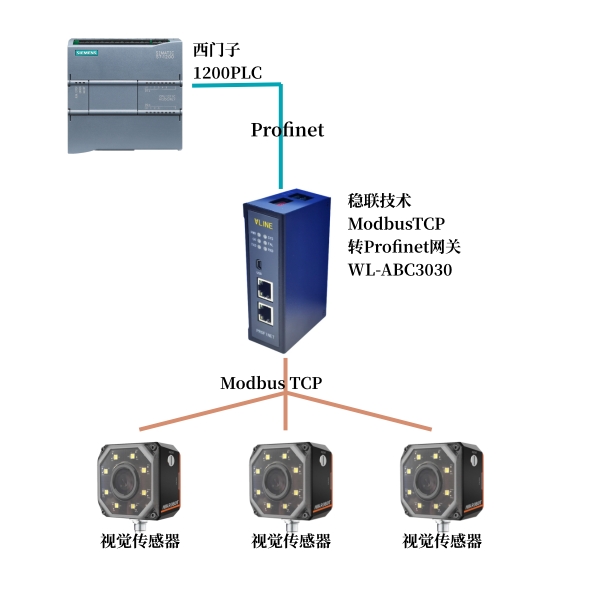
在某车厂汽车生产线上,需要将西门子1200PLC与海康机器人SC2000系列视觉传感器,顺畅连接,工程师现场添加了Modbus TCP转Profinet网关,实现了PLC和视觉传感器之间的通讯。
本文案例应用到设备为西门子S7-1200PLC,稳联技术(WL-ABC3033)ModbusTCP转Profinet网关, 海康机器人SC2000系列视觉传感器。
配置案例:
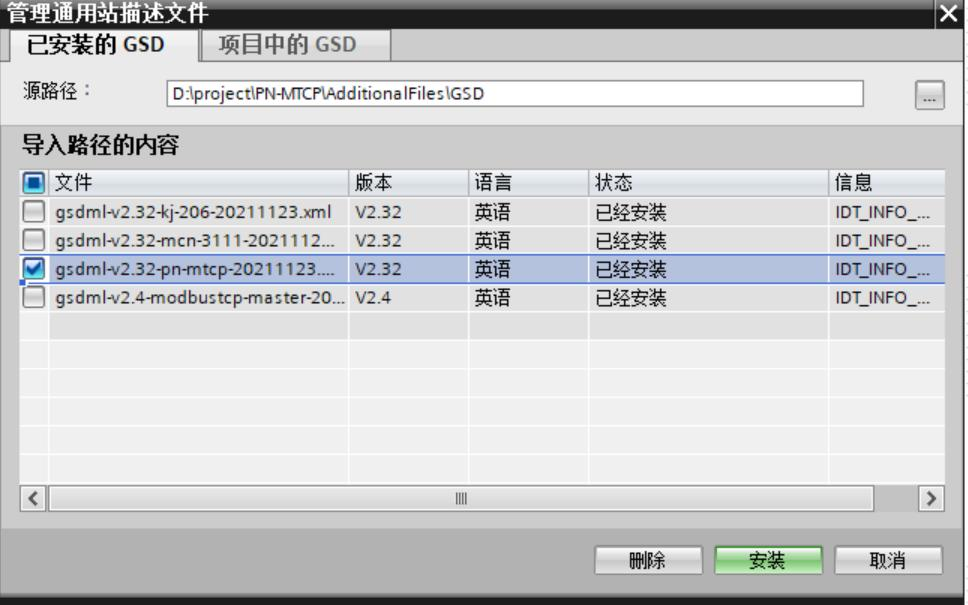
1.打开博图,安装gsd文件。
2.选择gsd所在文件夹位置(如桌面等)即可确定后会出现在图中,选择安装即可。

3.安装完毕后在如下地址找到Modbus转profinet网关模块。
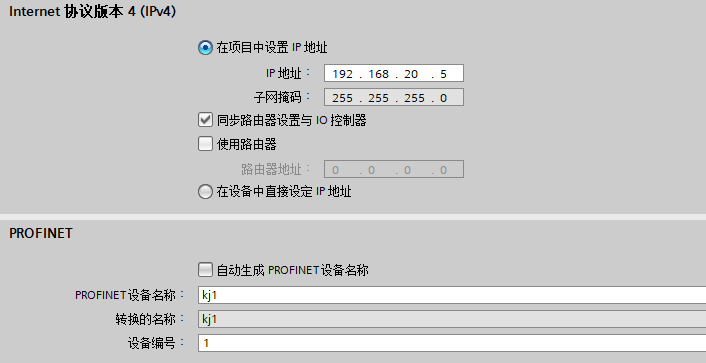
4.设置Modbus转profinet网关的IP地址和设备名称。要和配置软件保持一致

5.添加Modbus转profinet网关所需的输入输出字节长度。
组太后下载至PLC
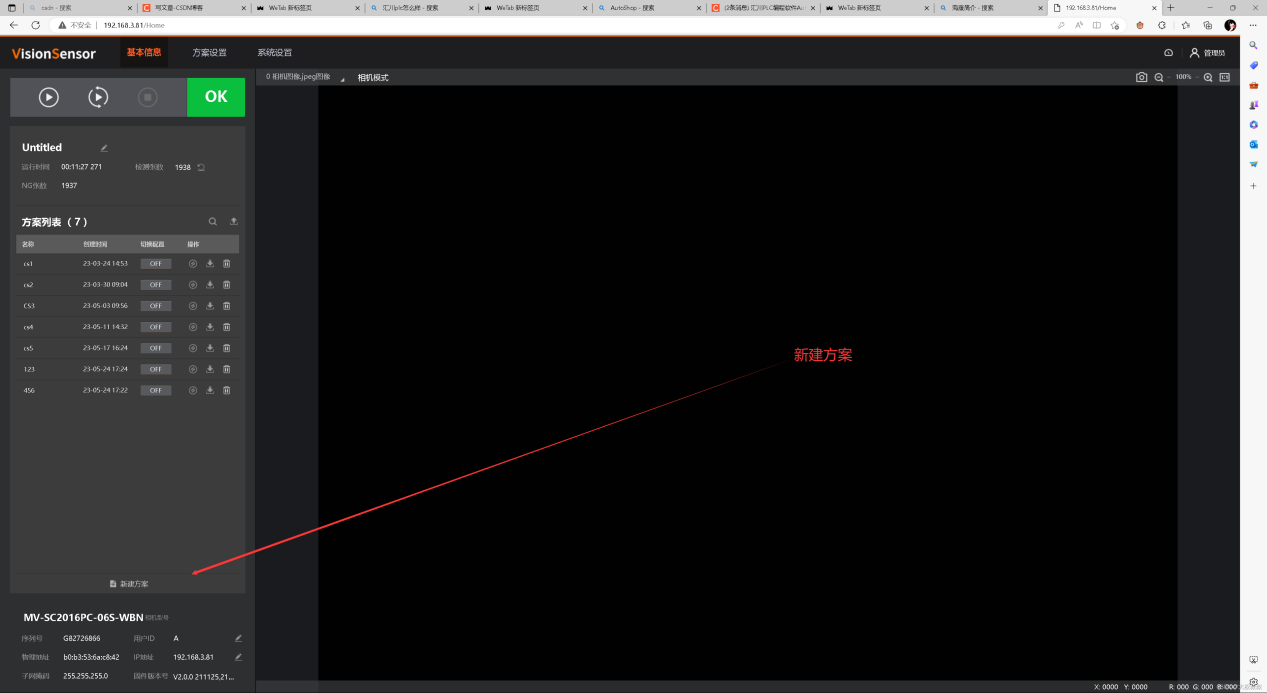
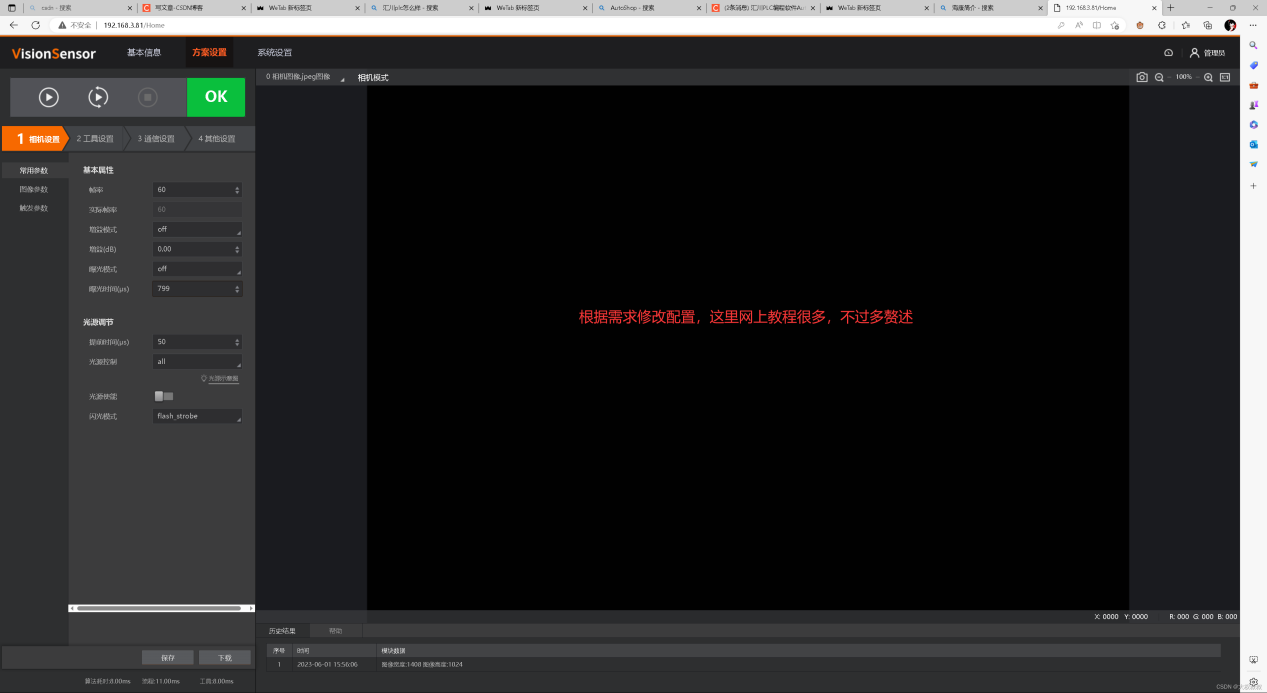
6.相机配置:
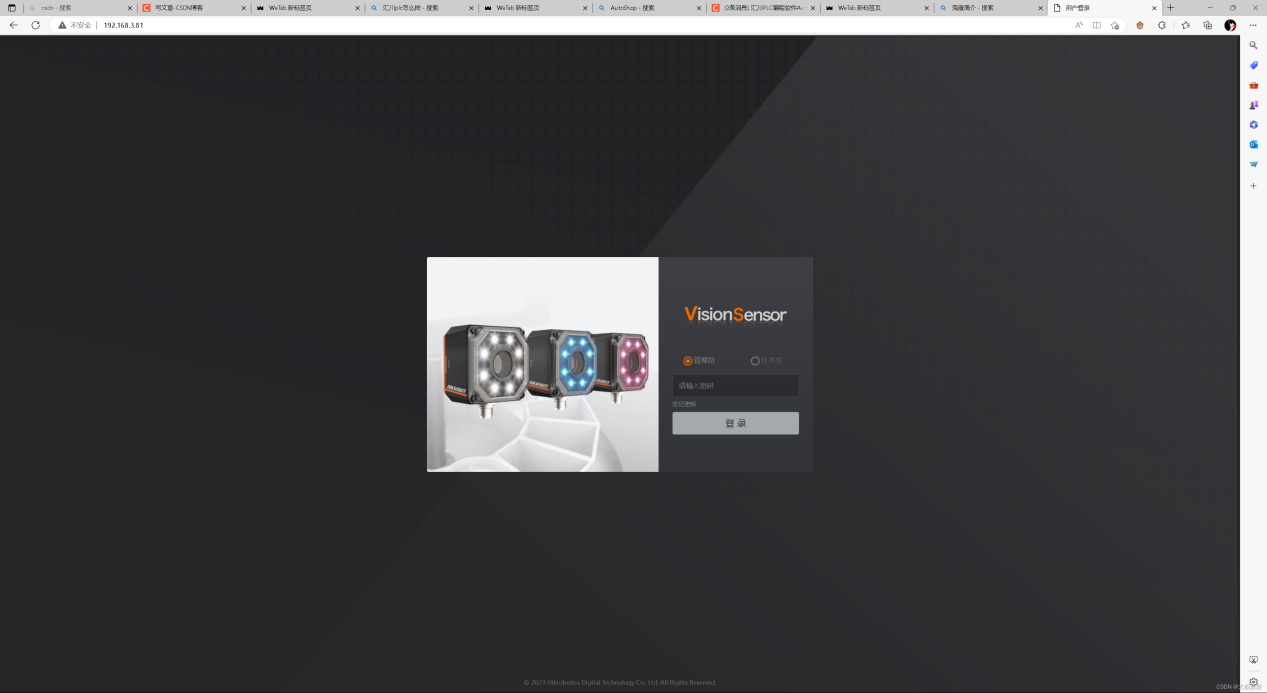
浏览器输入相机ip地址:找不到可以用这个软件查看ip或修改ip

7.浏览器输入这个ip进入登录界面,使用密码登录,初始密码为Abc1234
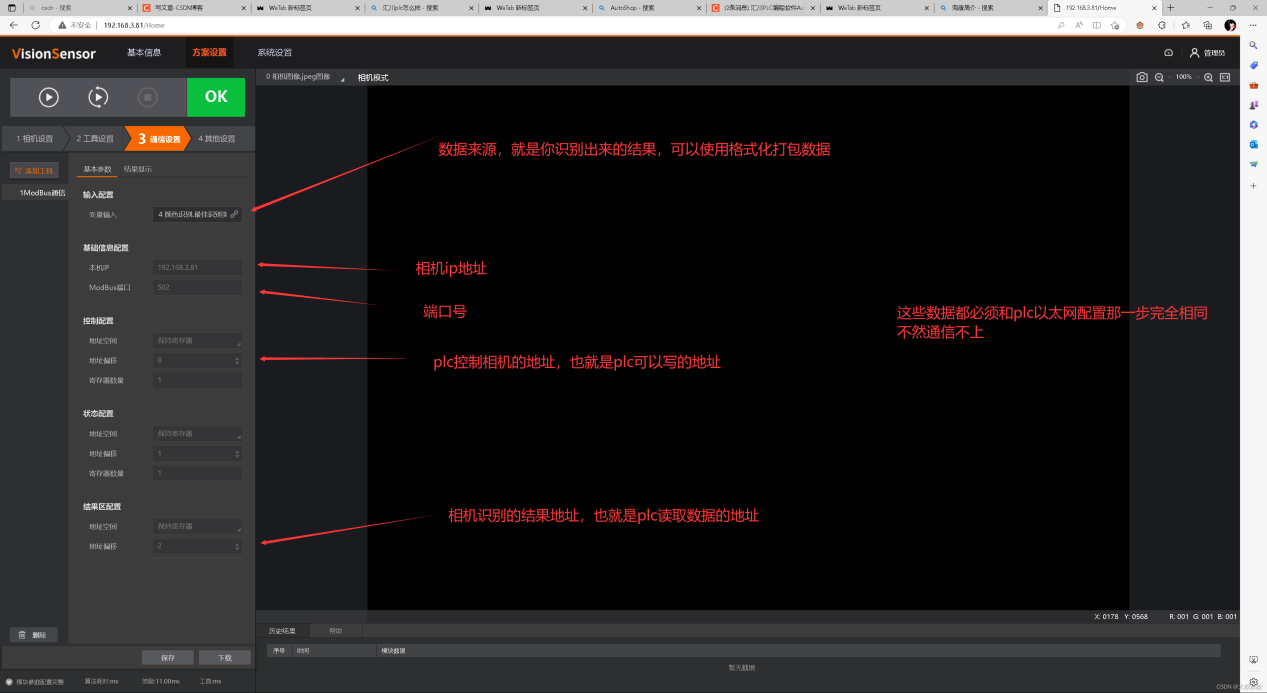
8.本文案例可知,从站功地址为192.168.3.81,功能码为03,寄存器地址2数量为5个,写功能码16h 寄存器地址0数量为1,即可开始进行ModbusTCP转Profinet网关的配置。
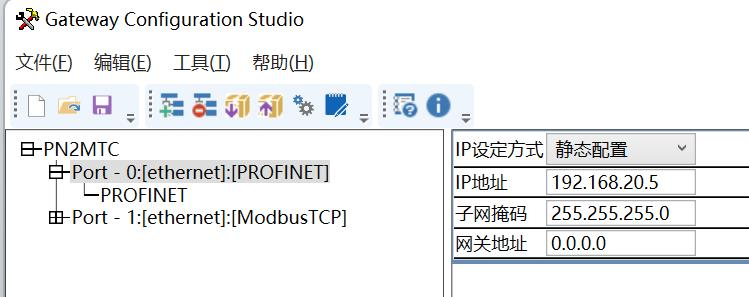
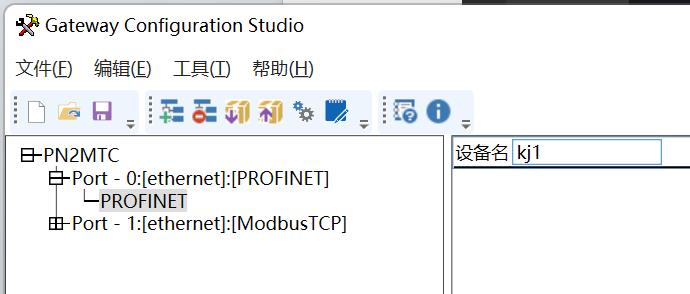
9.安装网关配置软件,打开软件新建项目选择PN2MTC;
10.设置网关Profinet一侧的IP地址,与PLC组态保持一致。
设备名称与PLC组态也保持一致
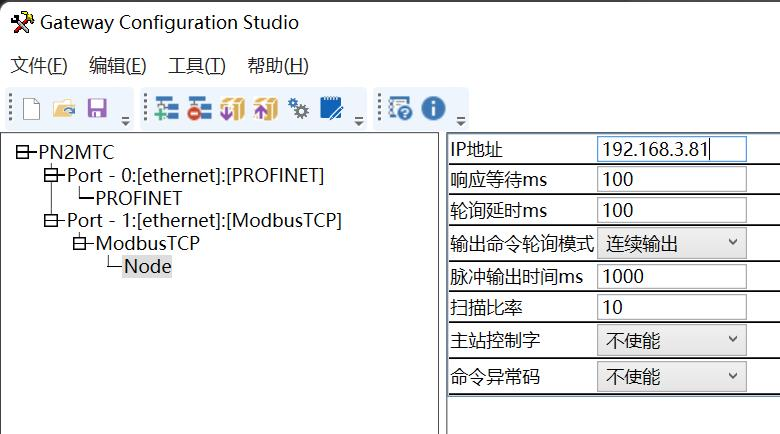
设置网关ModbusTCP一侧的IP地址
设置相机的IP地址以及等待/空闲时间以及写操作的模式
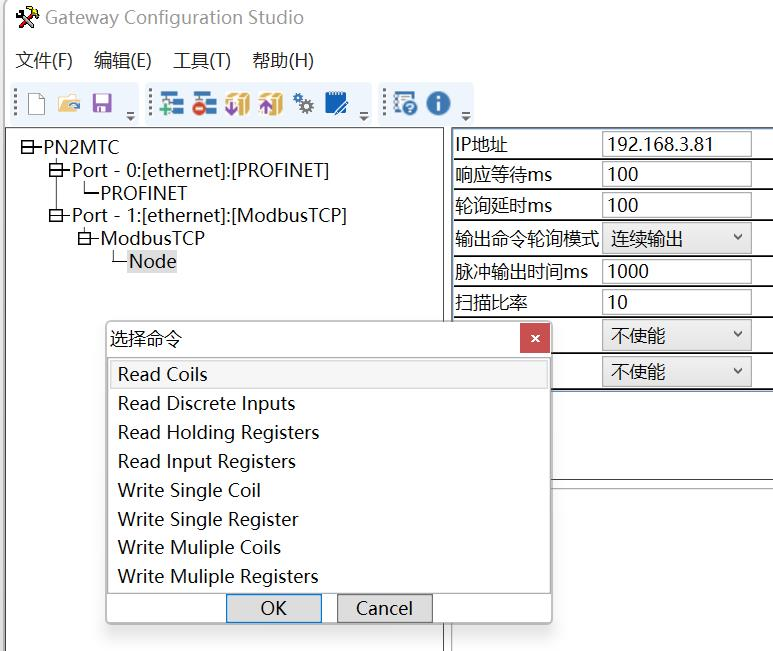
添加Modbus命令,03h和16h功能码
分别为Read Holdong Registers(03H功能码)
和Write Muliple Registers(16H功能码)
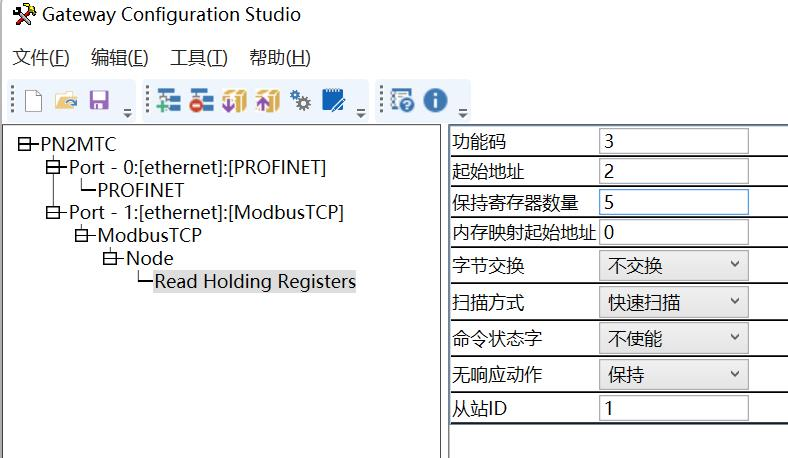
设置Modbus参数
起始地址2,寄存器数量5
起始地址0,寄存器数量1
内存映射1500对应网关在PLC中分配的Q地址输出64
对QW64写5再写3即可控制相机拍照

注:设置好网关功成之后下载进网关,重新上电后即可生效。
以上述为例,通过使用稳联技术ModbusTCP转Profinet网关作为中间设备,将1200PLC和机器人视觉照相机之间的通信进行了转换和协调,确保信息的准确传输和实时监控。
这种配置使得机器人能够在汽车生产上高效地工作并实现自动化控制。不仅提高了生产效率和自动化水平,还节省了人力资源和成本。
审核编辑 黄宇
-
传感器
+关注
关注
2553文章
51517浏览量
757307 -
机器人
+关注
关注
211文章
28752浏览量
208934 -
plc
+关注
关注
5019文章
13401浏览量
465980 -
西门子
+关注
关注
96文章
3068浏览量
116598 -
Profinet
+关注
关注
6文章
1225浏览量
23658
发布评论请先 登录
相关推荐
ABB工业机器人与西门子S-1200 PLC通信的实现
profinet转ethernet网关连接发那科机器人配置案例

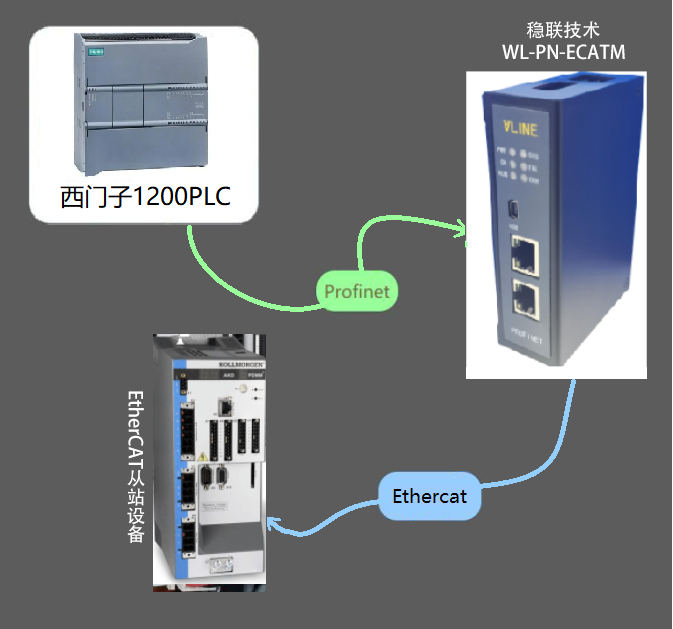
西门子PLC1200通过EtherCAT转Profinet网关连接kollmorgen驱动器
Modbus转Profinet网关将丹佛斯变频器接入西门子1200PLC配置
Profinet转Modbus485网关将探测器接入到西门子1200PLC
西门子1200PLC入门

西门子1200PLC连接科尔摩根伺服驱动器通讯案例
Profinet转Modbus TCP网关连接搬运机器人配置案例

西门子1200PLC之间的ModbusTCP通讯如何实现?
EtherCAT转profinet网关连接kollmorgen驱动器将其接入西门子1200PLC
EPR6-S工业机器人通过EtherCAT转profinet网关接入西门子系统

EtherNetIP转Profinet网关连接发那科机器人配置实例解析






 工商网监
工商网监
评论