 介绍一种前馈形式的振荡控制器(上)
介绍一种前馈形式的振荡控制器(上)
在控制指令下达之后,震荡现象往往是个令人头疼的问题,超调可能会带来物理系统损害,从振动形式达到稳态时间需要很长时间等问题。
在有些应用之中,比如说在微机电里面,甚至会达到100%(因为其阻尼主要来自空气阻力,而其体积又非常小,在真空中其品质因数可轻松达到1000以上,对应的阻尼系数ζ在0.001这个数量级)。如下图所示的一个微机电执行器的阶跃响应:

从控制的角度来讲,这是我们不希望看到的。该怎么减小震荡的问题?
系统零点与震荡里面提到过反馈系统里面抵消震荡的原理,我这次想聊一下前馈法,英文里面一般叫feedforward compensator,也有叫input shaper的,也有搞信号的就叫它是一个filter,anyway。前馈法的优点是什么?便宜,不用买传感器;不会带来稳定性问题。
如果对于一个线性度很好的稳定的震荡系统,前馈法抵消应该是个很容易的事情:引入一对前馈的零点(notch filter),把震荡的极点对给抵消了不就好了么。
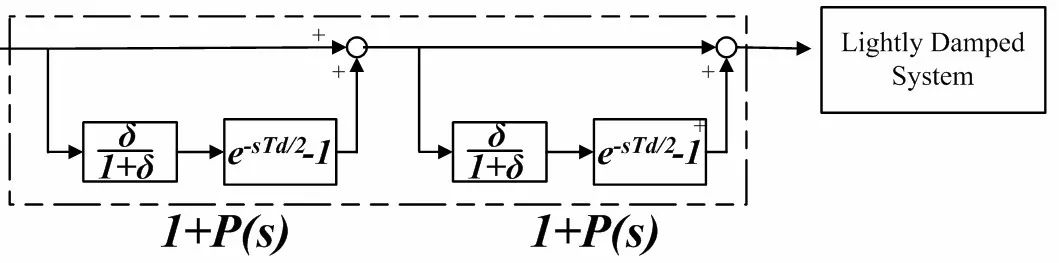
问题是,这个零点对怎么实现?纯微分都不好实现,那一对共轭的零点麻烦就会更大。其实有个经典的前馈控制器叫做posicast controller:

它的控制框图也很简单:
其中的 δ 和 Td 是非常直观的,对于工程师们是非常容易理解和实现的,如下图的例子,前者是超调量,后者是超调时间:

在根轨迹上来看一下发生了什么:

公式(1)其实是有个无穷零点的系统,而它的第一对零点就用来抵消掉那个不希望有的震荡极点对。它比notch好的地方在于, 它的高频增益是很低的,而不像notch那样过了陷波之后就会一路走高 ,看它自己的不加log scale频域图的一个例子:

可见它的幅值增益是不会超过1的。即对于高频的前馈噪声不敏感。再看一个在频域下抵消了震荡极点之后的图:

看红线明显可得知震荡极点对被抵消了。
这个方法对于线性度好的稳定系统相当有效,但是如果这个极点对和零点对不匹配呢?答案是鲁棒性比较差,即使有着比较小的不匹配,效果也会大打折扣:

前馈法是否就山穷水尽了?并不是。
-
传感器
+关注
关注
2551文章
51163浏览量
754120 -
控制器
+关注
关注
112文章
16382浏览量
178302 -
前馈控制器
+关注
关注
0文章
5浏览量
5877
发布评论请先 登录
相关推荐
介绍一种前馈形式的振荡控制器(下)
一种新型的模糊PID控制器介绍



馈通滤波器的五种形式






 工商网监
工商网监
评论