 协程的作用、结构及原理
协程的作用、结构及原理
本文介绍了协程的作用、结构、原理,并使用C++和汇编实现了64位系统下的协程池。文章内容避免了协程晦涩难懂的部分,用大量图文来分析原理,适合新手阅读学习。
GitHub源码
1. Web服务器问题
现代分布式Web后台服务逻辑通常由一系列RPC请求组成,若串行则耗时比较长。
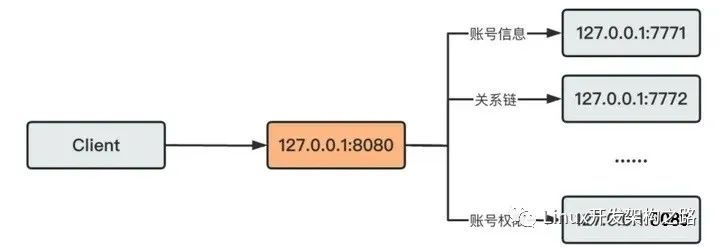
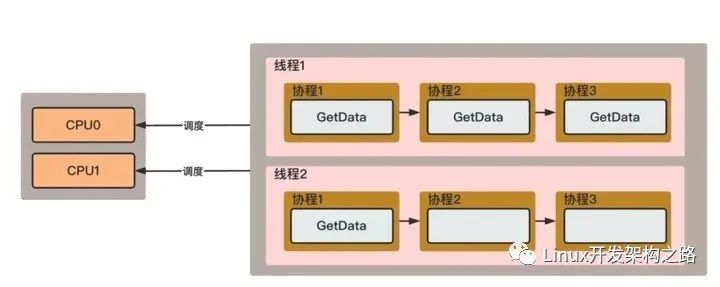
此时一般都会使用线程池并行运行RPC请求,如图中GetData函数
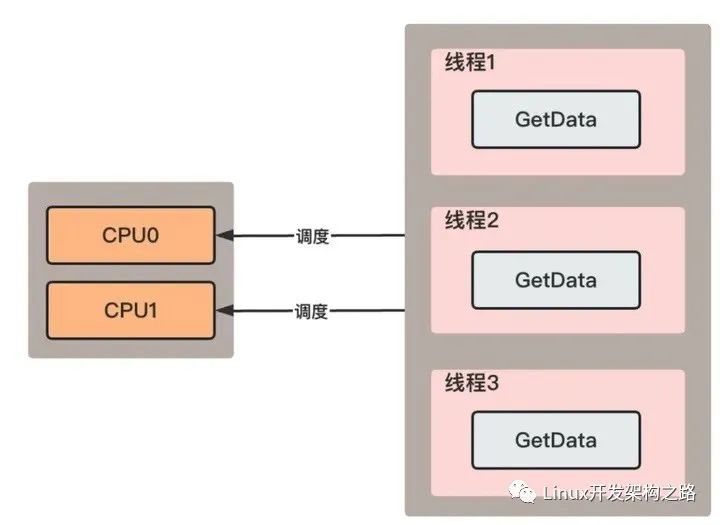
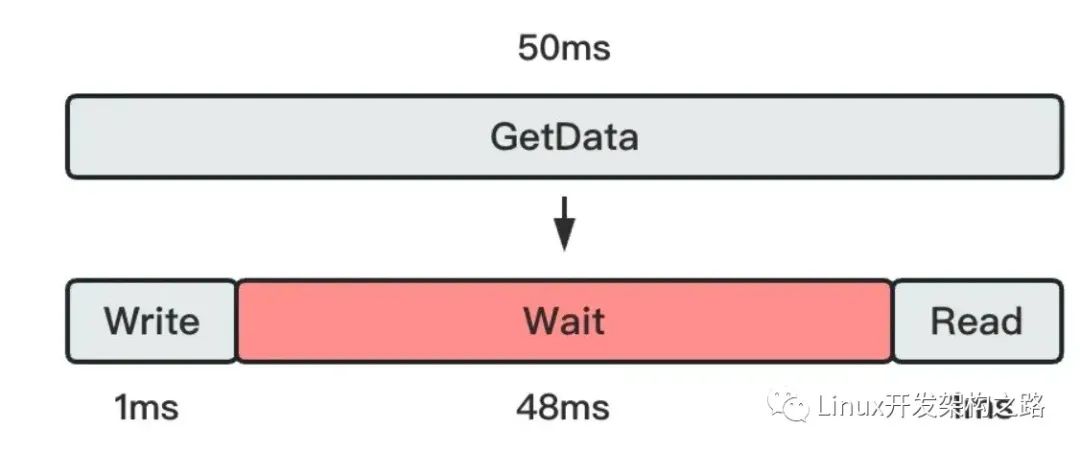
假设请求数据包不大,那么可假设GetData耗时组成如下图所示。在非阻塞读情况下,CPU将在Wait环节空转浪费资源(不断地read,得到返回码-1)。
- 协程的引入
有没有办法只用一个线程并行执行GetData呢?答案是:可以!我们假设有3个并行的GetData任务,下图线程1通过跳转控制流,减少CPU资源浪费。执行流为①⑦,在Wait阶段则跳到其他任务如①⑤。运行结束后也跳到其他任务如⑥~⑦。通过这种方式,3个GetData能用一个线程以52ms的耗时并行执行。
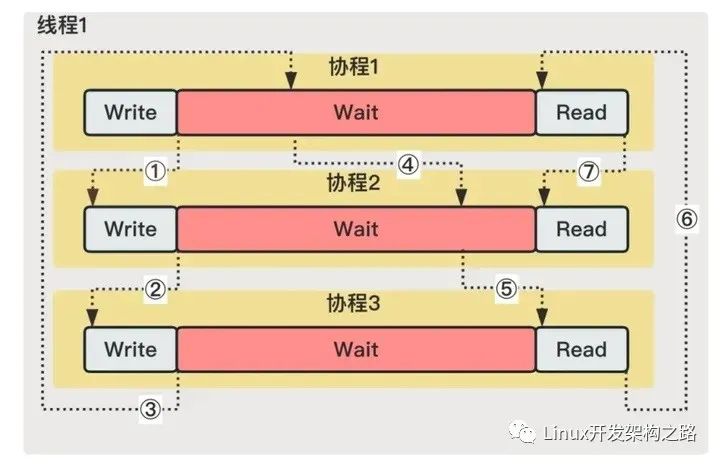
如果GetData任务可以被这样分配,则可以减少线程切换的消耗。因为协程的调度是线程内用户态执行的,CPU消耗非常小。
- 协程的原理
**从上文可知,协程之间的切换本质是函数的跳转,即如何让正在执行的函数跳转到另一个新的函数上,以及下次如何又跳转回来。**如下面代码所示:
printf("① 跳转到func2");
Coroutine::CoYield(); // 通过该函数跳到func2
printf("③ func2跳转回func1");
}
void func2() {
printf("② func2执行完毕");
}
要实现这种能力,需要结合汇编知识。首先研究如下简单函数的汇编语言
using namespace std;
class Object {
public:
int val[12];
};
int func(Object *pObj1, Object *pObj2) {
pObj1->val[0] = 1;
pObj1->val[11] = 11;
pObj2->val[0] = 2;
pObj2->val[11] = 12;
int arr[100];
arr[0] = 3;
arr[99] = 99;
return pObj1->val[0];
}
int main() {
Object obj, obj2;
int a = func(&obj, &obj2);
return a;
}
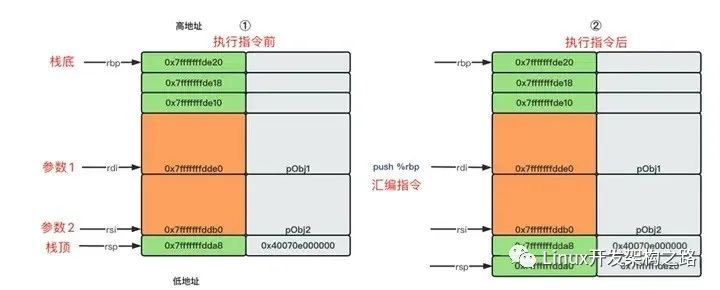
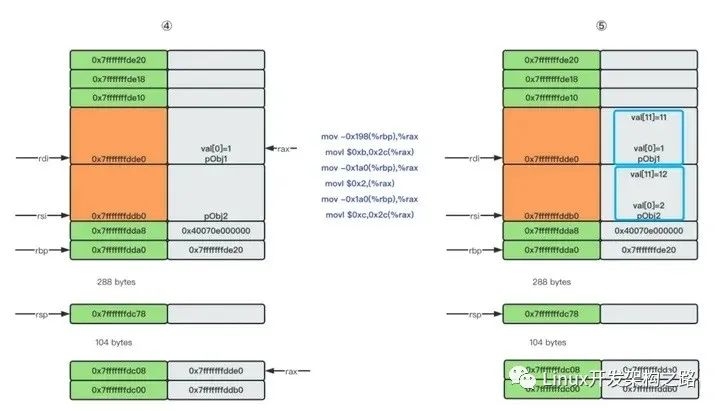
下面看看在64位系统汇编中,func函数是如何执行的。push %rbp是进入func函数执行的第一个指令,作用是把rbp的地址压到栈顶。因为rsp始终指向栈顶,所以压栈后,rsp的地址下移8字节。rdi和rsi相差48个字节,该空间被class Object内的int val[12]占用。
前两个指令让rbp指向rsp往下296字节的位置。后面两个指令把rdi和rsi地址保存在最下面。
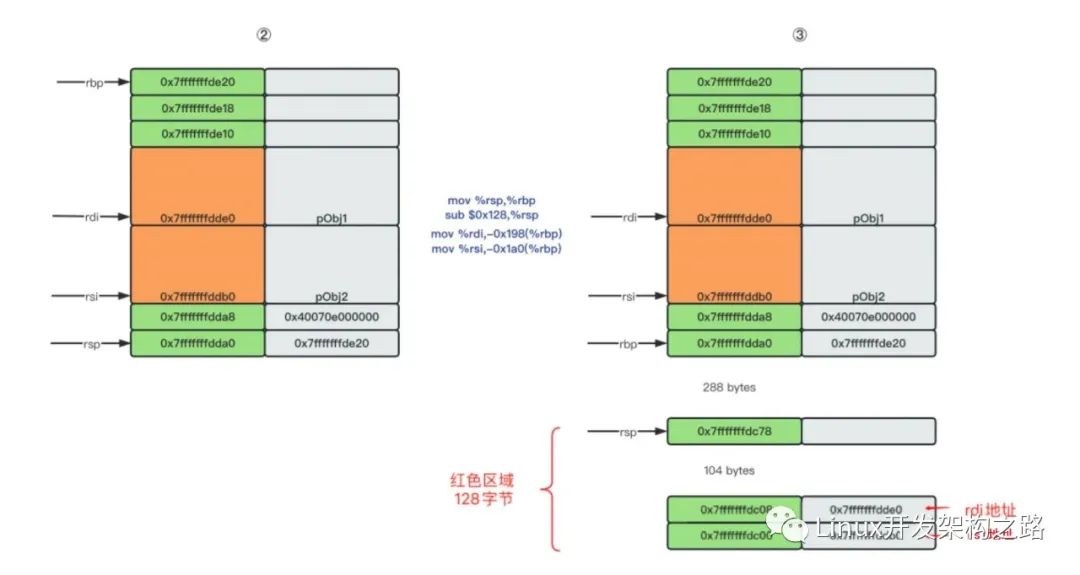
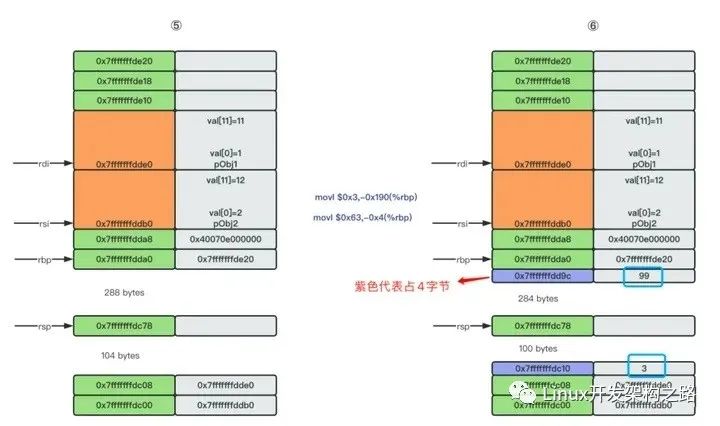
为什么rsp下移296字节?首先,上述代码使用了临时变量int arr[100],需要有400个字节的栈空间;其次,x64系统存有128字节的红色区域可使用;最后,rdi和rsi地址共占16字节。因此,rbp到红色区域底部的空间一共是 288 + 8 + 104 + 8 + 8 = 416字节。接下来才开始执行func函数第一行代码,给val[0]赋值。
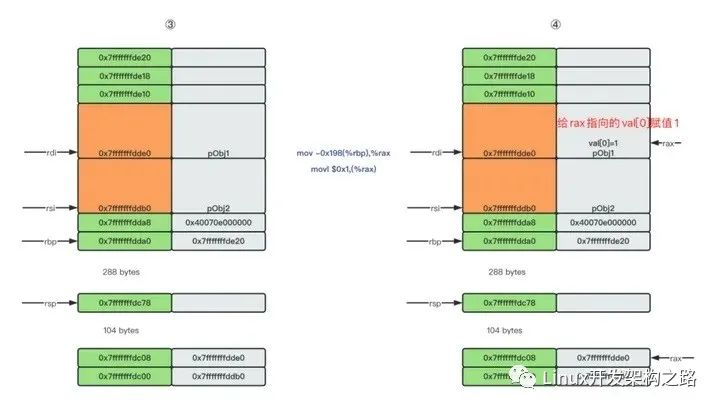
然后分别给pObj1和pObj2的成员变量赋值
接下来给临时变量arr赋值
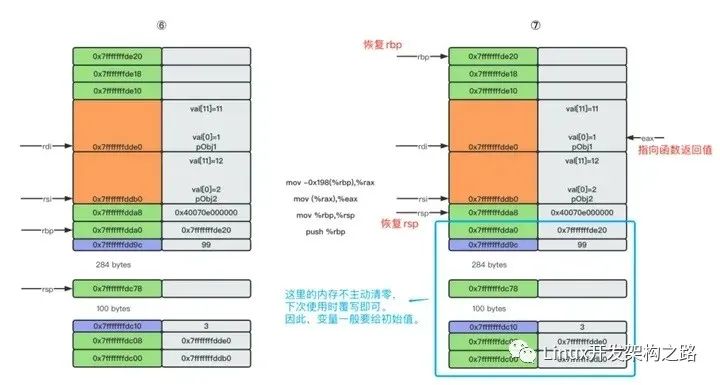
最后让eax指向返回值,恢复函数栈的栈底和栈顶。
- 协程的结构
从前面我们知道,每个函数在内存中都有栈顶rsp和栈底rbp。这两个值决定了函数可操作的内存范围,如下图所示
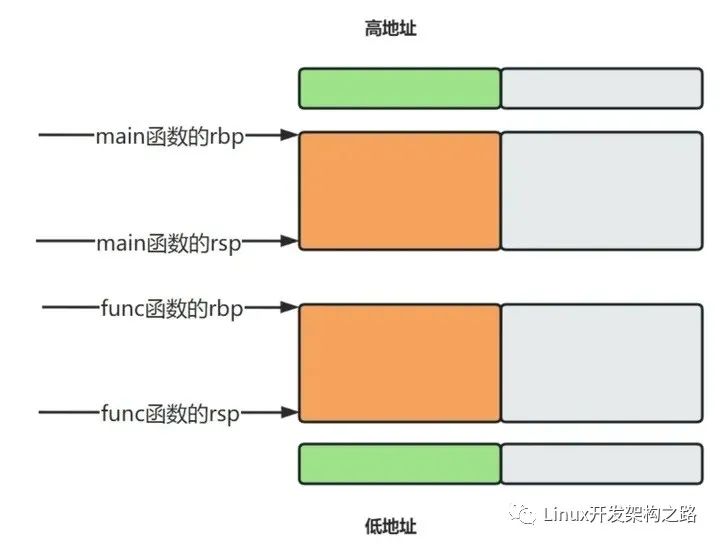
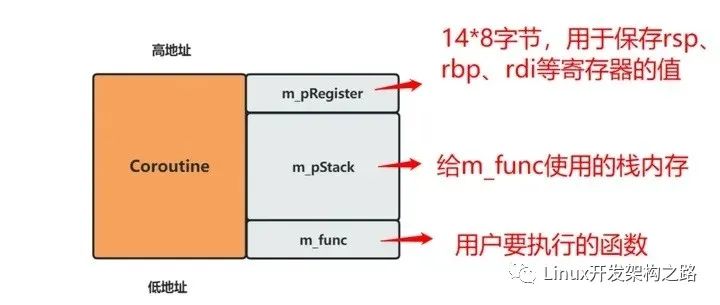
既然协程切换是从一个函数切换到另一个函数,那么就需要知道两个函数的rbp和rsp。然而,函数的rbp和rsp是执行时设定的,代码层面难以获得。既然如此,我们可以实现腾出空间,让函数在预期的rbp和rsp内。定义一个类如下:
void* m_pRegister[14];
char m_pStack[1024];
std::function m_func;
};()>
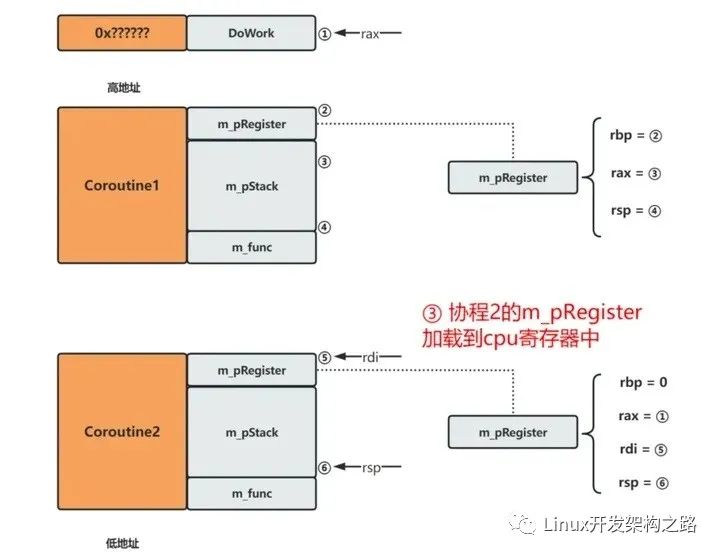
那么在内存模型中,该类的布局如下所示
这样的协程在能被使用前需要做初始化,如下图所示
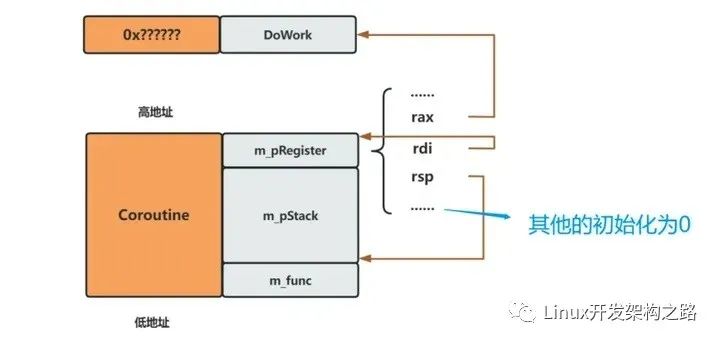
在其他协程切换过来时,cpu寄存器可按m_pRegister预设的地址赋值,开始执行DoWork函数,函数代码如下:
pThis->m_func();
pThis->Yield(); // 转让控制流给同线程的其他协程
}
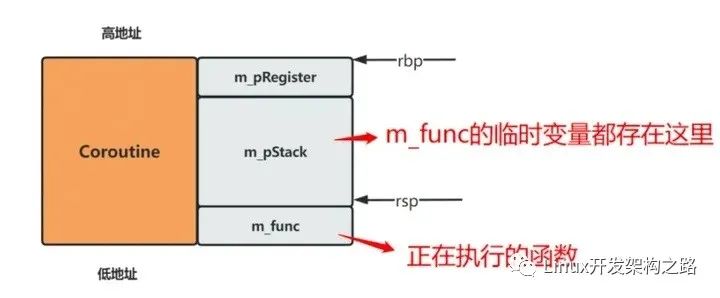
由于是静态函数,需令参数pThis为协程地址。所以,初始化时需要设置m_pRegister中的rdi为this。上述第二行代码执行时,rbp会设为this。所以执行m_func时,如下图所示:
- 协程间的切换
下面以Coroutine1切换到Coroutine2为例。主要分为两步:1. 保存Coroutine1的上下文
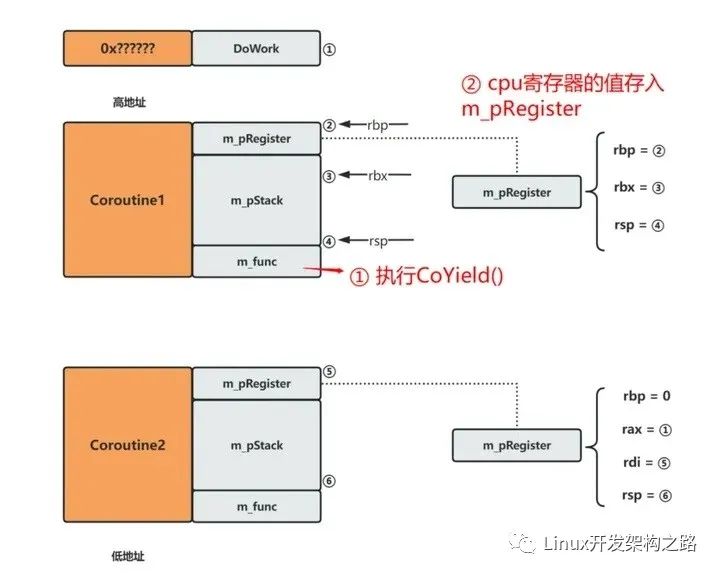
- 加载Coroutine2的上下文
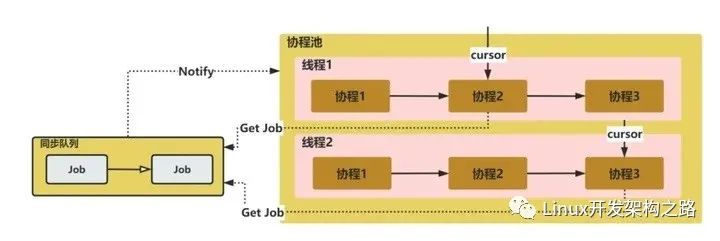
切换代码可见源代码Coroutine::Switch## 6. 协程池的实现
本文实现协程池比较简单,初始化创建线程并设置thread_local变量以保存协程队列状态。并且,每个线程额外创建一个main协程用作Guard。在执行时,每个线程通过轮询的方式切换协程,若协程无任务则尝试CAS获取Job,否则直接执行已有Job。当Job执行完或主动CoYield时,切换到下一个协程。为了避免CAS空转,在没有任务时会阻塞休眠。当任务来临时则Notify所有线程的协程。
- 源代码
example.cpp
* @file example.cpp
* @author souma
* @brief 使用协程池的示例,编译命令如下
* g++ example.cpp coroutine.cpp -lpthread -O3
* @version 0.1
* @date 2023-06-06
*
* @copyright Copyright (c) 2023
*
*/
#include
#include
#include "coroutine.h"
using namespace std;
using namespace comm;
void func(const string &sTaskName, uint32_t uWaitSeconds) {
printf("[%ld] [%s start], wait seconds[%u]n", time(nullptr), sTaskName.c_str(), uWaitSeconds);
time_t iStartSec = time(nullptr);
// 默认可用65535字节的栈内存,具体可看CO_STACK_SIZE
uint32_t uArrSize = 65535/4;
int arr[uArrSize];
while (time(nullptr) - iStartSec < uWaitSeconds) {
// 操作栈内存
for (int i = 0; i < uArrSize; ++i) {
arr[i] = i;
}
// 切换控制流
printf("[%ld] [%s] -> [协程池]n", time(nullptr), sTaskName.c_str());
usleep(100);
Coroutine::CoYield(); // 只需这一个函数即可切换控制流
printf("[%ld] [协程池] -> [%s]n", time(nullptr), sTaskName.c_str());
}
// 检查栈内存是否正确
for (int i = 0; i < uArrSize; ++i) {
if (arr[i] != i) {
printf("栈内存错误n");
exit(-1);
}
}
printf("[%ld] [%s end], expect_timecost[%d], real_timecost[%ld]n", time(nullptr), sTaskName.c_str(), uWaitSeconds, time(nullptr) - iStartSec);
}
int main() {
// 如果想当线程池用,可以令第一个参数为线程数,第二个参数为1。
// 在该场景下,使用小线程大协程不仅CPU消耗低,整体耗时也很低,可以自行测试。
CoroutinePool oPool(2, 300);
oPool.Run();
time_t iStartTime = time(nullptr);
const int iTaskCnt = 400;
vector> vecFuture;
for (int i = 0; i < iTaskCnt; ++i) {
// 模拟GetData中的Wait环节, 1 ~ 5秒等待
shared_ptr pFuture = oPool.Submit([i](){func("Task" + to_string(i), random() % 5 + 1);});
if (pFuture != nullptr) {
vecFuture.emplace_back(pFuture);
}
}
// 阻塞等待所有Task完成
for (auto it = vecFuture.begin(); it != vecFuture.end(); ++it) {
(*it)->Get();
}
printf("demo's finished, time cost[%ld]n", time(nullptr) - iStartTime);
return 0;
}
coroutine.h
* @file coroutine.h
* @author souma
* @brief 多线程无栈式协程池,请不要用-O0编译否则会产生coredump
* @version 0.1
* @date 2023-06-06
*
* @copyright Copyright (c) 2023
*
*/
#pragma once
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
namespace comm {
class Future;
class CoroutinePool;
class Coroutine;
struct CoroutinePoolCtx;
struct CoroutineTaskCtx;
struct CoroutinePoolCtx {
std::vector> m_vecCoroutine;
std::shared_ptr m_pMainCoroutine;
uint32_t m_uCursor;
uint32_t m_uWorkCnt;
};
struct CoroutineTaskCtx {
std::function m_userFunc;
std::shared_ptr m_pFuture;
};
// class ArraySyncQueue start
template
class ArraySyncQueue {
public:
ArraySyncQueue(uint32_t uCapacity, uint32_t uSleepUs = 100, uint32_t uRetryTimes = 3);
bool Push(T *pObj);
T* Pop();
inline bool IsFull() const { return m_uPushCursor == m_uPopCursor - 1 || (m_uPopCursor == 0 && m_uPushCursor == m_vecQueue.size() - 1); }
bool IsEmpty() const { return m_uPopCursor == m_uPushCursor; }
~ArraySyncQueue();
private:
uint32_t GetNextCursor(uint32_t uCursor);
private:
std::vector m_vecQueue;
uint32_t m_uPushCursor = 0;
uint32_t m_uPopCursor = 0;
uint32_t m_uSleepUs;
uint32_t m_uRetryTimes;
};
// class ArraySyncQueue end
// class Coroutine start
class Coroutine {
public:
friend class CoroutinePool;
/**
* @brief 调用该函数将执行流交给其他协程,仅在协程池环境下有效
*
* @return true:协程切换成功, false:不在协程池环境中运行
*/
static bool CoYield();
Coroutine(const Coroutine &) = delete;
Coroutine(Coroutine &&) = delete;
Coroutine & operator=(const Coroutine &) = delete;
Coroutine & operator=(Coroutine &&) = delete;
private:
// 4096是预留给库使用的栈内存大小,后者是留给用户使用的栈内存大小
constexpr static uint32_t CO_STACK_SIZE = 4096 + 65535;
Coroutine();
/**
* @brief 当前协程是否绑定了任务
*
* @return true:是
*/
inline bool HasTask() const { return m_pTaskCtx != nullptr; }
/**
* @brief 两个协程切换,从pPrev切换到pNext
*/
static void Switch(Coroutine *pPrev, Coroutine *pNext);
/**
* @brief 将控制流转给同线程的其他协程
*/
void Yield();
/**
* @brief 这个是给main协程用的
*/
void Register();
/**
* @brief 这个是给执行用户任务的协程用的
*/
void Register(std::shared_ptr pTaskCtx);
/**
* @return CoroutinePoolCtx& 当前线程的协程上下文
*/
static CoroutinePoolCtx & GetCtx();
/**
* @brief 让当前线程的cursor往后移,轮询协程
*/
static void MoveCursor();
/**
* @brief 协程包一层的函数
*/
static void DoWork(Coroutine *pThis);
/**
*
* @return void* 获得自建rsp地址
*/
void* GetRsp();
/**
* 保存寄存器的值到m_pStack中
*/
void SaveReg();
private:
void* m_pRegister[14];
char m_pStack[CO_STACK_SIZE];
std::shared_ptr m_pTaskCtx;
};
// class Coroutine end
// class CoroutinePool start
class CoroutinePool {
public:
friend class Coroutine;
/**
* @brief 建立一个多线程协程池,即创建uThreadCnt个线程,每个线程含有uCoroutineCnt个协程
调用Run开始运行,调用Stop或直接析构结束
* @param uThreadCnt 线程数,小于1则为1
* @param uCoroutineCnt 每个线程的协程数,小于1则为1
* @param uJobQueueSize 总任务队列大小,小于1则为1
*/
CoroutinePool(uint32_t uThreadCnt, uint32_t uCoroutineCnt, uint32_t uJobQueueSize = 1024000);
/**
* @brief 线程安全,可重入
* @return true:正常
*/
bool Run();
/**
* @brief 停止协程池 (会先保证池中任务完成再停止),线程安全可重入
*
*/
void Stop();
/**
* @param userFunc 用户函数
* @return std::shared_ptr nullptr:协程池队列满了,提交不了
*/
std::shared_ptr Submit(const std::function &userFunc);
~CoroutinePool();
CoroutinePool(const CoroutinePool &) = delete;
CoroutinePool(CoroutinePool &&) = delete;
CoroutinePool & operator=(const CoroutinePool &) = delete;
CoroutinePool & operator=(CoroutinePool &&) = delete;
private:
static void LoopWork(CoroutinePool &oPool);
private:
bool m_bStarted;
uint32_t m_uThreadCnt;
uint32_t m_uRoutineCnt;
ArraySyncQueue m_queueJob;
std::vector> m_vecThread;
std::mutex m_oMutex;
std::condition_variable m_oCondition;
};
// class CoroutinePool end
// class Future start
class Future {
public:
/**
* @brief 阻塞获得结果
*
* @param uTimeoutMs 超时时间
* @return true:成功, false:超时
*/
bool Get(uint32_t uTimeoutMs = -1);
/**
* @brief 设置状态为完成
*/
void SetFinished();
Future();
Future(const Future&) = delete;
Future(Future&&) = delete;
Future & operator=(const Future&) = delete;
Future & operator=(Future&&) = delete;
private:
std::mutex m_oMutex;
std::condition_variable m_oCondition;
bool m_bFinished;
};
// class Future end
}()>*>()>
coroutine.cpp
* @file coroutine.cpp
* @author souma
* @brief 协程池的具体实现
* @version 0.1
* @date 2023-06-06
*
* @copyright Copyright (c) 2023
*
*/
#include "coroutine.h"
#include
using namespace std;
namespace comm {
// class Coroutine start
Coroutine::Coroutine() {
m_pTaskCtx = nullptr;
}
void Coroutine::Register() {
m_pTaskCtx = make_shared();
m_pTaskCtx->m_userFunc = [](){};
m_pTaskCtx->m_pFuture = nullptr;
SaveReg();
}
void Coroutine::Register(shared_ptr pTaskCtx) {
m_pTaskCtx = pTaskCtx;
SaveReg();
}
inline void Coroutine::Yield() {
Coroutine::Switch(this, Coroutine::GetCtx().m_pMainCoroutine.get());
}
bool Coroutine::CoYield() {
if (GetCtx().m_vecCoroutine.size() == 0) {
return false;
}
GetCtx().m_vecCoroutine[GetCtx().m_uCursor]->Yield();
return true;
}
CoroutinePoolCtx & Coroutine::GetCtx() {
thread_local CoroutinePoolCtx coroutinePoolCtx;
return coroutinePoolCtx;
}
void Coroutine::MoveCursor() {
GetCtx().m_uCursor = GetCtx().m_uCursor == GetCtx().m_vecCoroutine.size() - 1 ? 0 : GetCtx().m_uCursor + 1;
}
extern "C" __attribute__((noinline, weak))
void Coroutine::Switch(Coroutine *pPrev, Coroutine *pNext) {
// 1.保存pPrev协程的上下文, rdi和pPrev同指向
// 2.加载pNext协程的上下文, rsi和pNext同指向
asm volatile(R"(
movq %rsp, %rax
movq %rbp, 104(%rdi)
movq %rax, 96(%rdi)
movq %rbx, 88(%rdi)
movq %rcx, 80(%rdi)
movq %rdx, 72(%rdi)
movq 0(%rax), %rax
movq %rax, 64(%rdi)
movq %rsi, 56(%rdi)
movq %rdi, 48(%rdi)
movq %r8, 40(%rdi)
movq %r9, 32(%rdi)
movq %r12, 24(%rdi)
movq %r13, 16(%rdi)
movq %r14, 8(%rdi)
movq %r15, (%rdi)
movq (%rsi), %r15
movq 8(%rsi), %r14
movq 16(%rsi), %r13
movq 24(%rsi), %r12
movq 32(%rsi), %r9
movq 40(%rsi), %r8
movq 48(%rsi), %rdi
movq 64(%rsi), %rax
movq 72(%rsi), %rdx
movq 80(%rsi), %rcx
movq 88(%rsi), %rbx
movq 96(%rsi), %rsp
movq 104(%rsi), %rbp
movq 56(%rsi), %rsi
movq %rax, (%rsp)
xorq %rax, %rax
)");
}
void Coroutine::DoWork(Coroutine *pThis) {
pThis->m_pTaskCtx->m_userFunc();
pThis->m_pTaskCtx->m_pFuture->SetFinished();
pThis->m_pTaskCtx.reset();
Coroutine::GetCtx().m_uWorkCnt--;
pThis->Yield();
}
void* Coroutine::GetRsp() {
// m_pRegister和m_pStack中间预留一个指针空间
auto sp = std::end(m_pStack) - sizeof(void*);
// 预定Rsp的地址保证能够整除8字节
sp = decltype(sp)(reinterpret_cast(sp) & (~0xF));
return sp;
}
void Coroutine::SaveReg() {
void *pStack = GetRsp();
memset(m_pRegister, 0, sizeof m_pRegister);
void **pRax = (void**)pStack;
*pRax = (void*) DoWork;
// rsp
m_pRegister[12] = pStack;
// rax
m_pRegister[8] = *pRax;
// rdi
m_pRegister[6] = this;
}
// class Coroutine end
// class CoroutinePool start
CoroutinePool::CoroutinePool(uint32_t uThreadCnt, uint32_t uCoroutineCnt, uint32_t uJobQueueSize) : m_queueJob(uJobQueueSize) {
m_bStarted = false;
m_uThreadCnt = max(uThreadCnt, 1u);
m_uRoutineCnt = max(uCoroutineCnt, 1u);
}
bool CoroutinePool::Run() {
if (!__sync_bool_compare_and_swap(&m_bStarted, false, true)) {
return false;
}
for (decltype(m_uThreadCnt) i = 0; i < m_uThreadCnt; ++i) {
m_vecThread.emplace_back(make_shared(CoroutinePool::LoopWork, ref(*this)));
}
return true;
}
void CoroutinePool::Stop() {
if (!__sync_bool_compare_and_swap(&m_bStarted, true, false)) {
return;
}
m_oCondition.notify_all();
for (auto it = m_vecThread.begin(); it != m_vecThread.end(); ++it) {
(*it)->join();
}
m_vecThread.clear();
}
shared_ptr CoroutinePool::Submit(const function &userFunc) {
shared_ptr pNewFuture = make_shared();
CoroutineTaskCtx *pTaskCtx = new CoroutineTaskCtx;
pTaskCtx->m_pFuture = pNewFuture;
pTaskCtx->m_userFunc = userFunc;
if (!m_queueJob.Push(pTaskCtx)) {
delete pTaskCtx, pTaskCtx = nullptr;
return nullptr;
}
m_oCondition.notify_all();
return pNewFuture;
}
CoroutinePool::~CoroutinePool() {
Stop();
}
void CoroutinePool::LoopWork(CoroutinePool &oPool) {
Coroutine::GetCtx().m_uCursor = 0;
Coroutine::GetCtx().m_uWorkCnt = 0;
Coroutine::GetCtx().m_pMainCoroutine = shared_ptr(new Coroutine);
Coroutine::GetCtx().m_pMainCoroutine->Register();
Coroutine::GetCtx().m_vecCoroutine.clear();
for (decltype(oPool.m_uRoutineCnt) i = 0; i < oPool.m_uRoutineCnt; ++i) {
Coroutine::GetCtx().m_vecCoroutine.emplace_back(shared_ptr(new Coroutine));
}
Coroutine *pMainCoroutine, *pCurCoroutine;
while (oPool.m_bStarted || Coroutine::GetCtx().m_uWorkCnt > 0 || !oPool.m_queueJob.IsEmpty()) {
pMainCoroutine = Coroutine::GetCtx().m_pMainCoroutine.get();
pCurCoroutine = Coroutine::GetCtx().m_vecCoroutine[Coroutine::GetCtx().m_uCursor].get();
if (pCurCoroutine->HasTask()) {
Coroutine::Switch(pMainCoroutine, pCurCoroutine);
Coroutine::MoveCursor();
continue;
}
CoroutineTaskCtx *pTaskCtx = oPool.m_queueJob.Pop();
if (pTaskCtx == nullptr) {
if (Coroutine::GetCtx().m_uWorkCnt > 0) {
Coroutine::MoveCursor();
continue;
}
unique_lock oLock(oPool.m_oMutex);
oPool.m_oCondition.wait(oLock);
continue;
}
pCurCoroutine->Register(shared_ptr(pTaskCtx));
++Coroutine::GetCtx().m_uWorkCnt;
Coroutine::Switch(pMainCoroutine, pCurCoroutine);
Coroutine::MoveCursor();
}
}
// class CoroutinePool end
// class Future start
Future::Future() {
m_bFinished = false;
}
bool Future::Get(uint32_t uTimeoutMs) {
unique_lock oLock(m_oMutex);
if (m_bFinished) {
return true;
}
return m_oCondition.wait_for(oLock, chrono::milliseconds(uTimeoutMs)) == cv_status::no_timeout;
}
void Future::SetFinished() {
{
unique_lock oLock(m_oMutex);
m_bFinished = true;
}
m_oCondition.notify_all();
}
// class Future end
// class ArraySyncQueue start
template
ArraySyncQueue::ArraySyncQueue(uint32_t uCapacity, uint32_t uSleepUs, uint32_t uRetryTimes) {
for (uint32_t i = 0; i < std::max(uCapacity, 1u); ++i) {
m_vecQueue.emplace_back(nullptr);
}
m_uSleepUs = uSleepUs;
m_uRetryTimes = uRetryTimes;
}
template
bool ArraySyncQueue::Push(T *pObj) {
if (pObj == nullptr) {
return false;
}
uint32_t uRetryTimes = 0;
while (uRetryTimes <= m_uRetryTimes) {
uint32_t uPushCursor = m_uPushCursor;
if (uPushCursor == m_uPopCursor - 1 || (m_uPopCursor == 0 && uPushCursor == m_vecQueue.size() - 1)) {
// 队列满了
return false;
}
if (!__sync_bool_compare_and_swap(&m_vecQueue[uPushCursor], nullptr, pObj)) {
uRetryTimes++;
usleep(m_uSleepUs);
continue;
}
m_uPushCursor = GetNextCursor(uPushCursor);
return true;
}
// 竞争失败
return false;
}
template
T* ArraySyncQueue::Pop() {
uint32_t uRetryTimes = 0;
while (uRetryTimes <= m_uRetryTimes) {
uint32_t uPopCursor = m_uPopCursor;
if (uPopCursor == m_uPushCursor) {
return nullptr;
}
T* pToReturn = m_vecQueue[uPopCursor];
if (pToReturn == nullptr || !__sync_bool_compare_and_swap(&m_vecQueue[uPopCursor], pToReturn, nullptr)) {
usleep(m_uSleepUs);
uRetryTimes++;
continue;
}
m_uPopCursor = GetNextCursor(uPopCursor);
return pToReturn;
}
return nullptr;
}
template
uint32_t ArraySyncQueue::GetNextCursor(uint32_t uCursor) {
if (uCursor == m_vecQueue.size() - 1) {
return 0;
}
return uCursor + 1;
}
template
ArraySyncQueue::~ArraySyncQueue() {
m_uRetryTimes = -1;
do {
T *pObj = Pop();
if (pObj == nullptr) {
return;
}
delete pObj, pObj = nullptr;
} while (true);
}
// class ArraySyncQueue end
}()>
8. 补充说明
8.1. 为什么不能-O0编译?
在-O0的情况下,编译器会给函数(coroutine.cpp:57)Coroutine::Switch包一层汇编指令,导致实际执行汇编指令不是期望的。具体可以分别用-O0和-O3在GDB下disassemble看到差异。
8.2. 如果函数使用栈很大怎么办?
源码中定义的协程栈为CO_STACK_SIZE=4096 + 65535KB,若用户函数使用的栈超过该范围会产生coredump。简单可行的解法是:1.尽量使用堆变量;2.改大CO_STACK_SIZE。
-
Web服务器
+关注
关注
0文章
138浏览量
24422 -
RPC
+关注
关注
0文章
111浏览量
11540 -
C++
+关注
关注
22文章
2110浏览量
73688 -
线程
+关注
关注
0文章
505浏览量
19702
发布评论请先 登录
相关推荐
谈谈协程的那些事儿

协程和线程有什么区别
Python中的多核CPU共享数据之协程详解

手机上的协处理器有什么作用_苹果协处理器是干什么的

Python后端项目的协程是什么
Python协程与JavaScript协程的对比及经验技巧
使用channel控制协程数量
详解Linux线程、线程与异步编程、协程与异步
协程的概念及协程的挂起函数介绍
Kotlin协程实战进阶之筑基篇3
FreeRTOS任务与协程介绍
协程的实现与原理
Linux线程、线程与异步编程、协程与异步介绍





 工商网监
工商网监
评论