 力触觉感知系统的工作原理
力触觉感知系统的工作原理
力触觉感知系统在机器人操作中具有非常重要的作用。它可以检测机器人末端执行器与工件相互作用时产生的三维力/力矩和接触信息。
这些信息对于机器人来说是极其重要的,它们可以提供关于环境、操作和自身状态的详细信息,帮助机器人做出更精确和安全的操作。
具体来说,力触觉感知系统的工作原理如下:首先,安装在机器人末端执行器上的力/力矩传感器会实时检测到与工件的相互作用力。
这些力信号将被转换为电信号,然后通过数据传输到机器人的控制系统。
在控制系统内,这些电信号会被进一步处理和分析,以生成有关机器人操作的各种信息。这些信息可以包括工件的形状、大小、硬度等,以及机器人末端执行器的姿态、位置等。
这些信息对于机器人来说是极其重要的,它们可以帮助机器人更好地适应环境,做出更精确的操作。
关节扭矩传感器的基本原理是应变测量。当机器人关节运动时,扭矩传感器会感受到由机器人关节施加在传感器上的力矩,这会导致传感器发生微小的形变。
扭矩传感器通过测量这种形变来确定扭矩的大小。
在机器人关节中,扭矩的传递通过齿轮、轴承和其他传动部件实现。
传感器通常被安装在这些传动部件中的一个上,以便测量扭矩。其中一种常见的传感器类型是应变片传感器。
机器人关节力控制系统主要通过对机器人的每个关节进行控制,实现机器人的运动控制、定位以及精确度的保持。一般来说,机器人关节力控制系统主要由伺服驱动器、编码器、控制器等组成。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
传感器
+关注
关注
2550文章
51038浏览量
753085 -
机器人
+关注
关注
211文章
28381浏览量
206919 -
感知系统
+关注
关注
1文章
70浏览量
15941
发布评论请先 登录
相关推荐
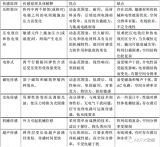
介绍几种触觉传感器的工作原理 PZT触觉传感器的研究进展和制作工艺
人体皮肤通过与物体表面的接触,对物体的粗糙度、硬度、导热性、温度、湿度、锐利性、振动、触觉力、触觉压力等物理性能的进行综合反应。
纹理触觉信息检测系统研究
本文利用PVDF(聚偏二氟乙烯)薄膜的压电效应和其独特物理性质,设计了一种高精度、高分辨率、高速响应的具有纹理触觉感知作用的传感器;然后,模拟人体感知纹理触觉信息
发表于 12-26 11:47
•19次下载
基于振动触觉的便携式环境信息感知器
本项目利用双目摄像头、加速度传感器,陀螺仪和振动致动器构建了一个基于振动触觉的便携式环境信息感知系统。该系统由摄像头图像获取模块、运动检测模块、中央处理模块以及振
发表于 12-02 14:31
•48次下载

一种柔性触觉传感阵列力觉标定
电子仿生皮肤在辅助智能机器人感知外界环境信息、实现人机交互等方面具有重要的作用。具备柔性、可穿戴特点的触觉传感器成为当今电子仿生皮肤的发展趋势之一,并在医疗康复州、工业生产等领域中得到广泛应用。为
发表于 01-19 14:28
•0次下载
基于传感器及触觉研究的尖端前沿图像系统设计
关键词:触觉 , 传感器 , 图像系统 你曾经玩过一种当你偏离赛道时手柄发出震动警示的电视赛车游戏吗?如果玩过,你便已经对触觉界面有了感观的认识。触觉这个词来自希腊语haptikos,
发表于 03-29 15:08
•318次阅读
元宇宙怎么感知触觉
元宇宙怎么感知触觉?今年元宇宙爆火,元宇宙几乎成了人们讨论的家常,建立元宇宙,从感知现实开始。元宇宙离不开3D触觉技术的支持,Facebook近日推出了一款适用于机器人和可穿戴设备的“
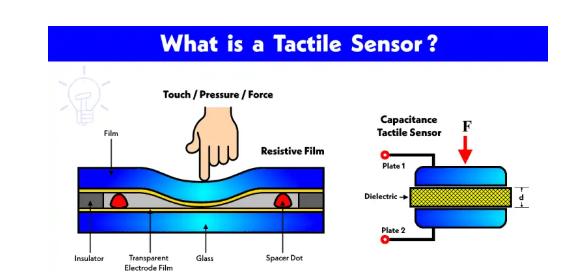
什么是触觉传感器?触觉传感器如何工作?
触觉传感器是我们在日常活动中最常用的。许多日常活动,如手机触摸屏、生物识别安全系统、压力测量、力测量、机器人等等都使用这种传感器。
发表于 08-29 14:44
•3530次阅读
基于视觉的多模态触觉感知系统
传统的多模态/多任务触觉感知系统通过集成多种传感单元来达到多模态触觉信息的解耦,但其往往导致系统结构的复杂性,以及需要应对来自不同刺激间的干
发表于 10-18 11:24
•901次阅读

智能驾驶系统的工作原理
智能驾驶系统的工作原理主要基于传感器技术、通信技术、人工智能算法以及计算机程序的综合运用。以下是智能驾驶系统工作原理的介绍: 一、感知





 工商网监
工商网监
评论