 如何使用示波器分析电机系统的DQ0?
如何使用示波器分析电机系统的DQ0?
直接正交零点(dq0)参数是磁场定向控制算法中的重要变量。这些重要参数通常是控制系统中使用的,但是在设计优化和调试过程中,这些参数需要实时测量,同时需要将这些参数值与测量值(如扭矩输出)关联起来。
以前,电机驱动器和逆变器设计者通常使用自定义的软件和硬件,去测量这些参数,把dq0参数与扭矩相关联。这种自定义方法极其复杂,且价格昂贵。
泰克提出了一种替代方法,可以测量dq0分量,以及旋转传感器和无传感器系统的合成驱动矢量。该技术是逆变器、电机和驱动器分析软件包(选件 IMDA-DQO),在5系示波器或6系示波器上可以选加配置。它采用信号处理技术,根据驱动系统输出的实时测量结果,计算d、q和0控制参数。这样,给定一个特定电气输入,设计者就能直观看到扭矩。
矢量驱动/磁场定向控制
用于同步电机和交流感应电机的先进驱动器通常采用矢量驱动技术。与简单的标量驱动相比,矢量驱动能提供更平稳的运行、更快的加速度和更出色的转矩控制。矢量驱动采用磁场定向控制(FOC),虽然用途广泛、效率高,但也比标量驱动复杂得多。图1显示了面向磁场的控制系统产生的PWM输出波形。
图2是磁场定向控制系统的简化框图。控制系统中使用克拉克(Clarke)和帕克(Park)变换,将施加到电机上的三相电压转换为正交的D和Q矢量。这些简化矢量可以很容易地进行缩放和整合,以维持所需的速度和扭矩。接下来,反向变换可用于在逆变器内创建脉冲宽度调制的驱动信号。
需要注意的是,控制系统还要测量转子的位置。这可以通过霍尔传感器、旋转变压器或正交编码器接口 (QEI)等传感器来实现。
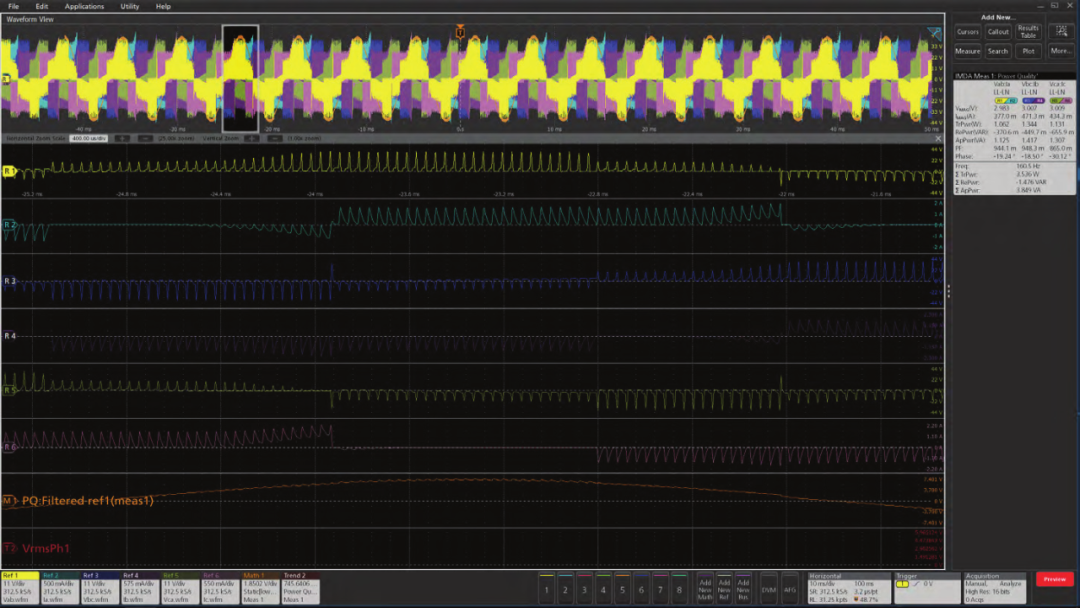
图1. 矢量驱动/磁场定向控制使用复杂的PWM波形
同样地,在控制系统中也可使用无传感器系统,利用电机的反电动势来确定转子位置。
如图1所示,D值和Q值通常位于数字信号处理模块(如FPGA)的内部,可能无法直接测量。IMDA-DQO软件可根据采样的三相输出电压或电流以及转子的角度位置,来显示这些关键参数。这样,工程师就能看到控制系统调整的效果,并快速、轻松地查看信号关系。
DQ0测量原理
如上所述,在示波器上运行的IMDA-DQ0软件,使用采样电压或电流以及角度位置信息来实时计算d、q和0。本节将解释这些测量背后的原理。
三相交流和直流电机可通过旋转电压和电流方程建模。等式1至3表示VR,VS和VT的三相电压函数。
VG代表相应增益,‘w’是2*π*f,这里的‘f’指的是标称频率。
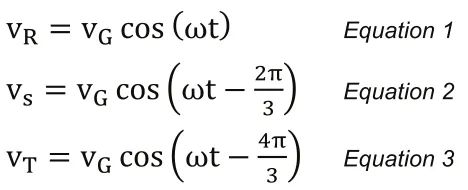
在正确连接的情况下,示波器可以测量整个过程中的任意瞬时电压值。
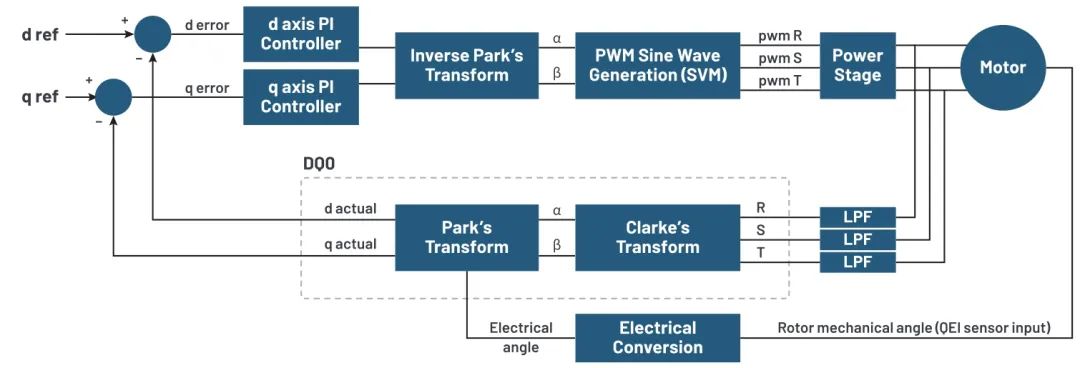
图2. 磁场定向控制系统简化框图,显示如何使用d和q来简化三相PWM电机驱动中的反馈
采集通常约为10个完整周期,具体取决于采样率和可用记录长度。低通滤波器可用于减轻高频失真、电压尖峰、开关噪声和电磁干扰(EMI)的影响。
示波器还可以利用霍尔效应传感器、QEI或旋转变压器的输出,去测量转子的角位置。
给定电压或电流矢量以及转子角度后,就能求得d、q和0。要将电压或电流矢量按d轴排列,可应用矩阵方程(方程4)将三相矢量转换为dq0矢量。

■R、S和T可以代表IR、S、T(t) 或IR,S,T(t) orVRN,SN,TN(t)。
■t是采样时间,从0到采集时间。
■θ是由电机输出端的霍尔效应传感器、正交编码器接口(QEI)或旋转变压器确定的电气角度。在无传感器系统中,可以使用相对于基准电压或电流的偏移角度。
■生成的DQO是旋转参照帧,它代表了系统相对于转子位置的情况。
进行示波器测量
在MSO5B系列和MSO6B系列的示波器中,逆变器、电机和驱动器分析软件包的关键电气测量被归入电气分析测量类别。电气分析测量类别中有泰克专利的直接正交零点(DQO)测量。
图3显示了DQO测量的源设置示例。除了选择源和连线外,还可以指定一个低通滤波器,该滤波器可以应用于所有源的设置,也可以仅应用于边沿限定。如上所述,这对于减少EMI和开关噪声造成的噪声非常有用。
本例中使用的是正交编码接口(QEI)。对于无传感器系统,可以使用带偏移角和滤波电信号的反向电动势法。
在磁场定向控制中,目标是控制D值和Q值来获取想要的扭矩。通过独立控制D和Q,可以实现最大转矩电流比 (MTPA)。图4显示了示波器上的相量图,D和Q矢量叠加在三相电压矢量上。
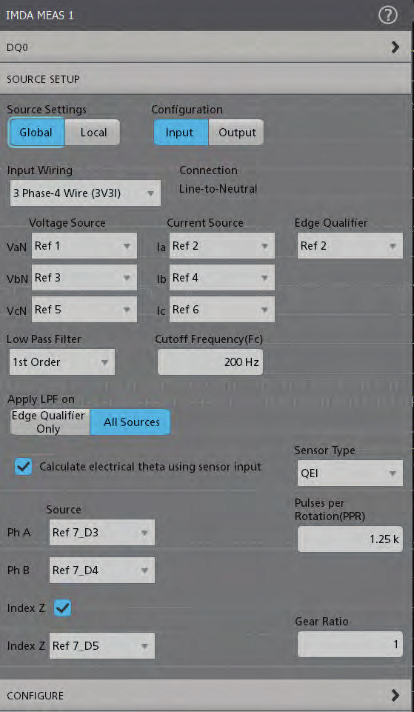
图3. 在使用正交编码接口(QEI)的系统上配置示波器进行DQO测量
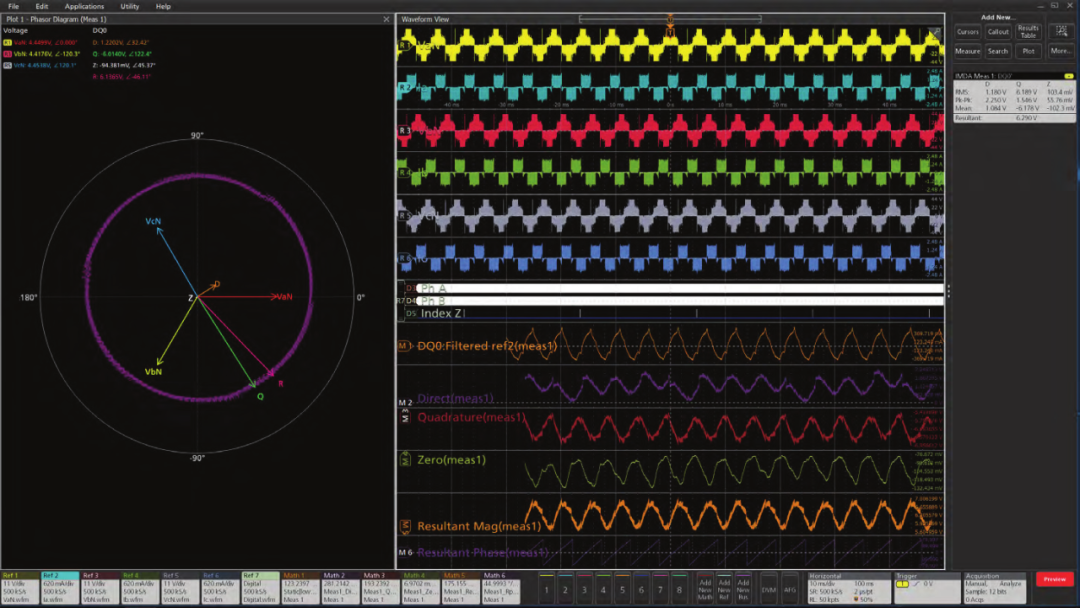
图4. DQ0相位图显示测量结果矢量 (R),电机速度和方向反馈由正交编码传感器提供
在任意时间点,d轴都沿着转子的南北轴,代表转子磁通方向。q轴超前d轴90度。D代表转子磁通轴,Q代表转矩轴。由于来自定子和转子的垂直磁通会产生转矩,因此最好让定子或转子的磁通相对于彼此成90度角。也就是说,定子磁通或定子电流最好沿着q轴。
一般来讲,D和Q被视为恒定值,而采用这种方法后,我们可以通过时域数学波形(如图4所示) 直观地看到D和Q上的纹波。这是衡量输入稳定性的另一个指标。
除D和Q外,分析软件还显示了结果矢量(R)。R的计算方法是在D和Q的每个采样点计算D和Q向量的斜边矢量。在这种情况下,斜边矢量由QEI的脉冲(Z)决定。增量角由QEI根据编码器的每转脉冲数(PPR)计算得出。通过观察结果矢量(R)旋转,我们可以看到控制系统是否在平稳地驱动电机。我们还可以观察换向的次数 -- 注意图4中R向量图中的六个失真点,对应六个换向步骤。
图4右下方显示了D、Q、0和R的时间图。使用示波器的光标功能,可以同时在时间上看到测量值,以及相量图上的旋转帧。
|结论|
D、Q、0和R是矢量电机驱动中常见的磁场定向控制系统的关键变量,但它们很难被实时观测到。本文介绍的新技术可在示波器上显示这些变量,让工程师方便查看,并且将这些关键变量与电气和机械参数关联起来。这为驱动系统或逆变器的调试和优化提供了宝贵的方法。
-
示波器
+关注
关注
113文章
6243浏览量
184879 -
电机系统
+关注
关注
0文章
72浏览量
11067 -
泰克科技
+关注
关注
2文章
175浏览量
19137
原文标题:白皮书 | 如何使用示波器分析电机系统的DQ0?
文章出处:【微信号:泰克科技,微信公众号:泰克科技】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
示波器波形分析软件使用指南
使用示波器分析波形的技巧 如何设置示波器的触发功能
48V起动发电机系统方案指南(1)

减速齿轮箱电机的工作原理与应用分析

晶闸管电动机系统与发电机系统比较

Aigtek功率放大器如何驱动MEMS微电机系统
动图展示两大电机系统的运行顺序
如何使用示波器进行电机驱动信号测试?
Easygo仿真平台双电机系统的实时仿真应用案例






 工商网监
工商网监
评论