 力控机器人的控制框架和性能评估
力控机器人的控制框架和性能评估

力控机器人是一种能够基于外部力量进行控制和交互的机器人系统。与传统的位置控制机器人相比,力控机器人更加灵活和适应性强,能够实现与环境和人类操作者的安全交互。
力控机器人的核心思想是通过传感器测量机器人与环境之间的力和力矩,并将其作为控制输入进行实时调整。它可以感知和响应外部力的大小和方向,从而能够适应不同的工作环境和任务需求。
力控机器人的控制框架通常包括以下几个关键组件:
- 力传感器:用于测量机器人与环境之间的力和力矩。常见的力传感器包括压力传感器、力敏电阻、应变计等。
- 控制算法:力控机器人的控制算法根据传感器反馈的力信息,实时计算出机器人的控制指令。常见的控制算法包括PID控制、阻抗控制和导纳控制等。
- 执行器:力控机器人的执行器根据控制指令对机器人进行力和力矩的调整。常见的执行器包括电机、液压驱动器等。
- 交互界面:力控机器人通常需要与人类操作者进行交互,因此需要设计友好的交互界面,方便操作者监控和调整机器人的行为。
力控机器人的性能评估可以从多个方面进行,其中一些常见的性能指标包括:
1.动态响应:力控机器人的动态响应能力是评估其控制性能的重要指标。它可以通过观察机器人对外部力的实时调整情况来评估,包括响应速度、稳定性和准确性等。
2.接触感知和控制:力控机器人的接触感知和控制能力是评估其与环境交互的重要指标。它包括对接触力大小和方向的准确感知以及对接触力的合理调整和控制能力。
3.安全性:力控机器人的安全性是评估其在与人类操作者和环境进行交互时的重要指标。它包括机器人对外部力的感知和应对能力,以及对意外碰撞和异常情况的安全反应能力。
- 精度和稳定性:力控机器人的精度和稳定性是评估其执行力控制任务的重要指标。它包括机器人在施加和维持特定力和力矩时的准确性和稳定性。
通过对力控机器人的性能分析和评估,可以进一步优化其控制算法和系统设计,以提高其交互性能和适应性。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
传感器
+关注
关注
2578文章
55756浏览量
795039 -
机器人
+关注
关注
214文章
31602浏览量
224275 -
力控
+关注
关注
0文章
22浏览量
8122
发布评论请先 登录
相关推荐
热点推荐
高精度机器人控制的核心——基于 MYD-LT536 开发板的精密运动控制方案
的机器人控制系统,例如米尔的 MYD-LT536 开发板。
二、MYD-LT536:为机器人控制系统而生的核心平台
米尔 MYD-LT536 开发板基于全志T536 高
发表于 11-14 15:48
机器人创意工作室:打造最完美的WIFI/蓝牙智能小车机器人
! WIFI机器人网·机器人创意工作室论坛致力于打造一个完美的、便捷的、廉价的移动智能家居控制平台,该平台基于开源技术,采用openwrt WIFI模组/迷你路由器+普通U-S-B摄像头方案,构建出一个
发表于 04-20 21:43
什么是工业机器人
自动存入程序存储器中在机器人自动工作时,控制系统从程序存储器中检出相应信息,将指令信号传给驱动机构,使执行机构再现示教的各种动作。示教输入程序的工业机器人称为示教再现型工业机器人。具有
发表于 01-19 10:58
【mBot申请】智能机器人的检测评估
申请理由:想通过一款适于控制智能机器,可称之为智能机器人的开发套件,外设加入各类传感器,实现智能,检测,反馈为一体的闭环系统,来进行对该类智能机器人的
发表于 11-30 15:56
辰汉-如何实现服务机器人的运算与控制
的能力。红外模块可以实现对一些外部电器的操控,电池和电池管理模块给整个机器人的运转提供能量。辰汉-硬件结构是实现服务机器人运算和控制的基础,在高性能嵌入式处理器上运行的操作系统,进行着
发表于 06-09 17:18
六轴工业机器人控制方式
系统的管理、通讯、运动学和动力学计算,并向下级微机发送指令信息;作为下级从机,各关节分别对应一个CPU,进行插补运算和伺服控制处理,实现给定的运动,并向主机反馈信息。根据作业任务要求的不同,机器人的控制方式又可分为点位
发表于 08-09 16:30
机器人、协作机器人和移动机器人,你分的清楚吗
),除非风险评估另有要求。 适当的风险评估可以根据ISO 13849:2006的附录A进行,但自2016年起,R15.306已成为机器人专用的风险评估方法。进行风险
发表于 10-30 11:33
如何设计智能灭火机器人控制器?
席文姣,陈帝伊,马孝义(西北农林科技大学 水利与建筑工程学院,陕西 西安712100)0引言如何设计智能灭火机器人控制器?控制器是智能机器人处理和控
发表于 07-31 06:23
机器人是什么?
的机器。一些书呆子式的语言可能会把它描述成“一个可重新编程的多功能机械手,旨在通过各种编程的动作移动材料、部件、工具或专门设备,以完成各种任务”。这个定义非常具有表现力。那么制造机器人的要素是什么呢
发表于 03-31 10:31

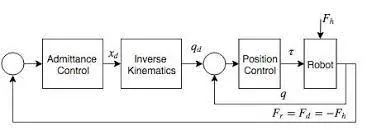
力控机器人导纳控制框架
执行器,以实现所需的运动轨迹。 环境建模与识别:用于对环境进行感知和识别,以帮助机器人适应环境变化。 性能分析: •导纳响应性能:评估导纳控制



评论