 力控机器人导纳控制框架
力控机器人导纳控制框架

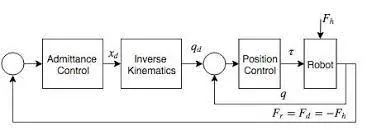
导纳控制框架:
导纳控制器:根据传感器测量值和期望的力/力矩指令,生成控制指令以实现期望的导纳互动。
运动控制器:用于控制机器人的关节或末端执行器,以实现所需的运动轨迹。
环境建模与识别:用于对环境进行感知和识别,以帮助机器人适应环境变化。
性能分析:
•导纳响应性能:评估导纳控制器对外部力变化的响应速度和稳定性。
•导纳参数分析:分析导纳控制器中的参数对系统性能的影响,如导纳刚度和导纳阻尼等参数。
•导纳稳定性分析:评估导纳控制系统的稳定性,包括导纳稳定性边界和导纳参数的稳定性范围。
•动态性能分析:分析导纳控制器对不同频率的外部力变化的动态响应性能。
% 定义导纳控制参数
Md = 5;
Bd = 10;
Kd = 20;
% 定义机械臂质量和初始位置
m = 1;
x = 0;
xdot = 0;
% 定义期望位置和速度
xd = 1;
xdot_d = 0;
% 定义时间步长和仿真时间
dt = 0.01;
T = 5;
% 初始化位置数组
x_arr = zeros(1, T/dt);
% 进行导纳控制仿真
for i = 1:T/dt
% 计算外部力
F_ext = 10 * sin(i*dt);
% 计算期望加速度
xddot_d = (F_ext - Bd*(xdot-xdot_d) - Kd*(x-xd)) / Md;
% 计算控制力
F = m * xddot_d - Bd * xdot - Kd * x;
% 更新位置和速度
xdot = xdot + (F + F_ext) / m * dt;
x = x + xdot * dt;
% 存储位置
x_arr(i) = x;
end
% 绘制位置图像
t = 0:dt:T-dt;
plot(t, x_arr)
title('Position')
仿真结果如下:

通过对力控机器人交互控制框架的性能分析,可以评估和优化系统的稳定性、精度、响应性能和适应性,以实现与外部环境或操作者的高效、安全和可靠的力互动。
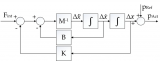
阻抗控制与导纳控制框图分别如图(a)与(b)所示:

声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
传感器
+关注
关注
2578文章
55792浏览量
795147 -
机器人
+关注
关注
214文章
31624浏览量
224344 -
力控
+关注
关注
0文章
22浏览量
8123
发布评论请先 登录
相关推荐
热点推荐
六维力传感器:当机器人拥有“真实触觉”,未来会发生什么?
这种关键“手感”的核心部件。
举个例子,精密零件装配时,传感器会实时监测机器人和工件之间的力。一旦发现力不对劲,控制系统立刻调整机器人的动作
发表于 04-29 16:29
什么是工业机器人
自动存入程序存储器中在机器人自动工作时,控制系统从程序存储器中检出相应信息,将指令信号传给驱动机构,使执行机构再现示教的各种动作。示教输入程序的工业机器人称为示教再现型工业机器人。具有
发表于 01-19 10:58
六轴工业机器人控制方式
系统的管理、通讯、运动学和动力学计算,并向下级微机发送指令信息;作为下级从机,各关节分别对应一个CPU,进行插补运算和伺服控制处理,实现给定的运动,并向主机反馈信息。根据作业任务要求的不同,机器人的控制方式又可分为点位
发表于 08-09 16:30
机器人、协作机器人和移动机器人,你分的清楚吗
机器人”的额外指导。图1很好地展示了一个机器人系统,其具有一般受保护的工作空间和一个协同操作空间。下面的视频中对此也有介绍。ISO/TS 15066的关键主题之一是“功率和力限制”。在这种工作模式下
发表于 10-30 11:33
机器人是什么?
的机器。一些书呆子式的语言可能会把它描述成“一个可重新编程的多功能机械手,旨在通过各种编程的动作移动材料、部件、工具或专门设备,以完成各种任务”。这个定义非常具有表现力。那么制造机器人的要素是什么呢
发表于 03-31 10:31
通过多轴工业机器人来聊聊机器人控制系统以及控制器的实现
,年均增长31%,预计2023年我国工业机器人市场增速将在20%至25%左右,仍会维持较快的增速。 飞凌嵌入式作为一家专注嵌入式核心控制系统研发与制造的高新技术企业,经过多年的研发与积累,产品已广泛应用
发表于 02-24 17:05
力控机器人的控制框架和性能评估
与环境之间的力和力矩,并将其作为控制输入进行实时调整。它可以感知和响应外部力的大小和方向,从而能够适应不同的工作环境和任务需求。 力控机器人




评论