 速度模式下外环力矩控制步骤
速度模式下外环力矩控制步骤
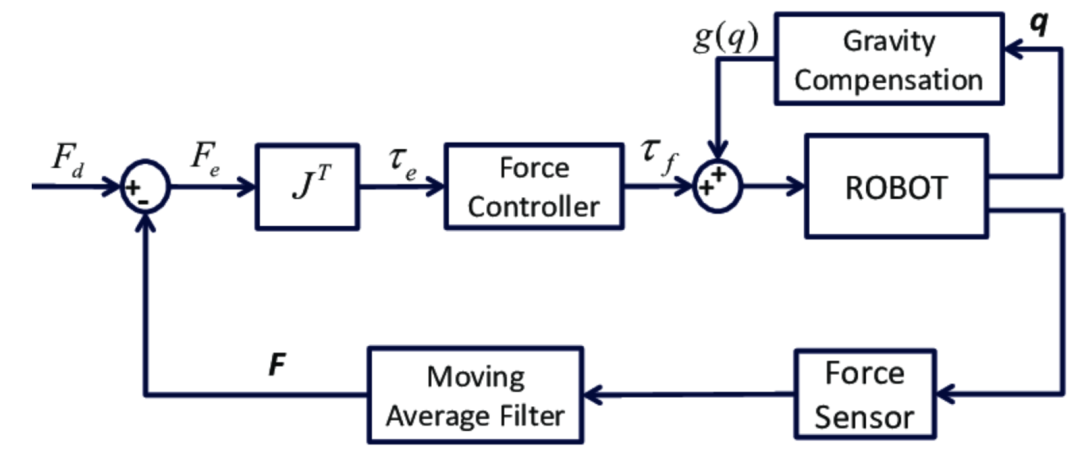
在机器人速度模式下的外环力矩控制中,通常使用速度环和力矩环两个控制环路来实现。速度环控制机器人的关节速度,而力矩环控制机器人输出的力矩。
以下是实现速度模式下的外环力矩控制的一般步骤:
- 设定期望速度:根据任务需求或控制要求,设定期望的关节速度。
2.速度控制器设计:设计一个速度控制器,该控制器接收期望速度和实际速度之间的误差作为输入,并产生相应的控制信号。常用的速度控制器包括比例-积分(PI)控制器或者更复杂的控制器结构。
- 控制信号转换:将速度控制器输出的控制信号转换为电机驱动器能够理解的形式。这通常涉及到信号放大、滤波和适配等步骤。
4.控制信号输入电机驱动器:将转换后的控制信号输入到电机驱动器中,以驱动电机并控制关节速度。
- 力矩测量与反馈:使用力矩传感器来测量机器人输出的力矩,并将实际力矩信息反馈给控制系统。
- 力矩控制器设计:设计一个力矩控制器,该控制器接收期望力矩和实际力矩之间的误差作为输入,并产生相应的控制信号。
- 控制信号转换:将力矩控制器输出的控制信号转换为电机驱动器能够理解的形式。
- 控制信号输入电机驱动器:将转换后的控制信号输入到电机驱动器中,以调节机器人输出的力矩。
通过以上步骤,实现了速度模式下的外环力矩控制。速度控制器控制关节速度,力矩控制器控制输出力矩,两者结合实现了期望的力矩控制。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
驱动器
+关注
关注
53文章
8271浏览量
146948 -
机器人
+关注
关注
211文章
28632浏览量
208212 -
控制
+关注
关注
4文章
1014浏览量
122743
发布评论请先 登录
相关推荐
Power PMAC中EtherCAT通信的驱动器下循环力矩模式(CST)的使用
本文主要说明Power PMAC中EtherCAT通信的驱动器下循环力矩模式(CST)的使用,主要通过操作PDO实现,对于循环速度模式(CS
发表于 09-15 08:31
孤岛模式下的VSG控制SIMULINK模型搭建方式
写在最前面 那些看似平淡日复一日的努力,终将使得梦想之花盛开,乘着年轻,闯出自己的精彩。希望各位都能实现理想,与君共勉~ 本期介绍孤岛模式下的VSG控制SIMUlink模型搭建方式VSG控制
发表于 03-07 10:29
•2次下载

力矩电机怎么控制转速和力矩_力矩电机和伺服电机区别
控制力矩电机的转速和力矩通常需要使用一些控制方法,下面介绍几种常见的控制方法:
变频控制:使用变频器对电机进行
发表于 03-10 14:31
•7857次阅读





 工商网监
工商网监
评论