 EtherCAT超高速实时运动控制卡XPCIE1032H上位机C#开发(一):驱动安装与建立连接
EtherCAT超高速实时运动控制卡XPCIE1032H上位机C#开发(一):驱动安装与建立连接
XPCIE1032H功能简介
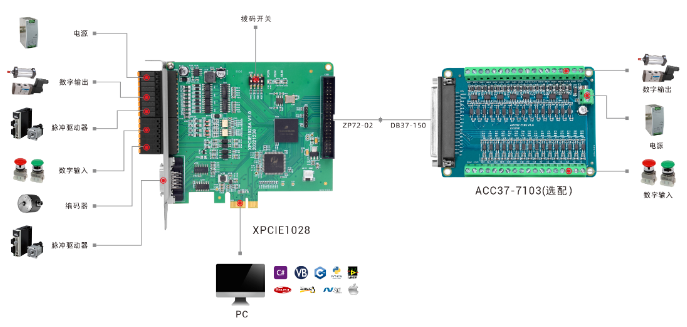
XPCIE1032H是一款基于PCI Express的EtherCAT总线运动控制卡,可选6-64轴运动控制,支持多路高速数字输入输出,可轻松实现多轴同步控制和高速数据传输。
XPCIE1032H集成了强大的运动控制功能,结合MotionRT7运动控制实时软核,解决了高速高精应用中,PC Windows开发的非实时痛点,指令交互速度比传统的PCI/PCIe快10倍。
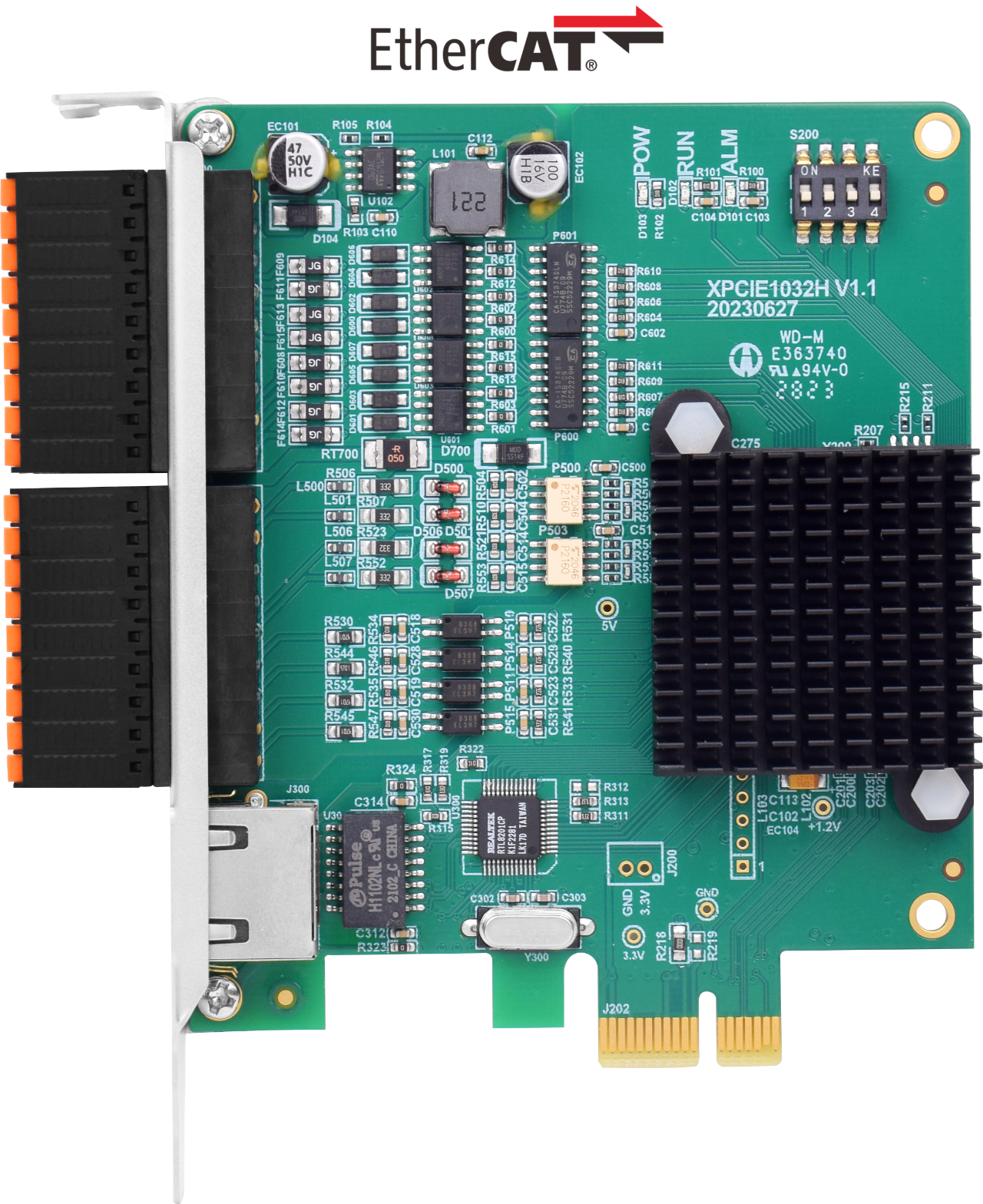
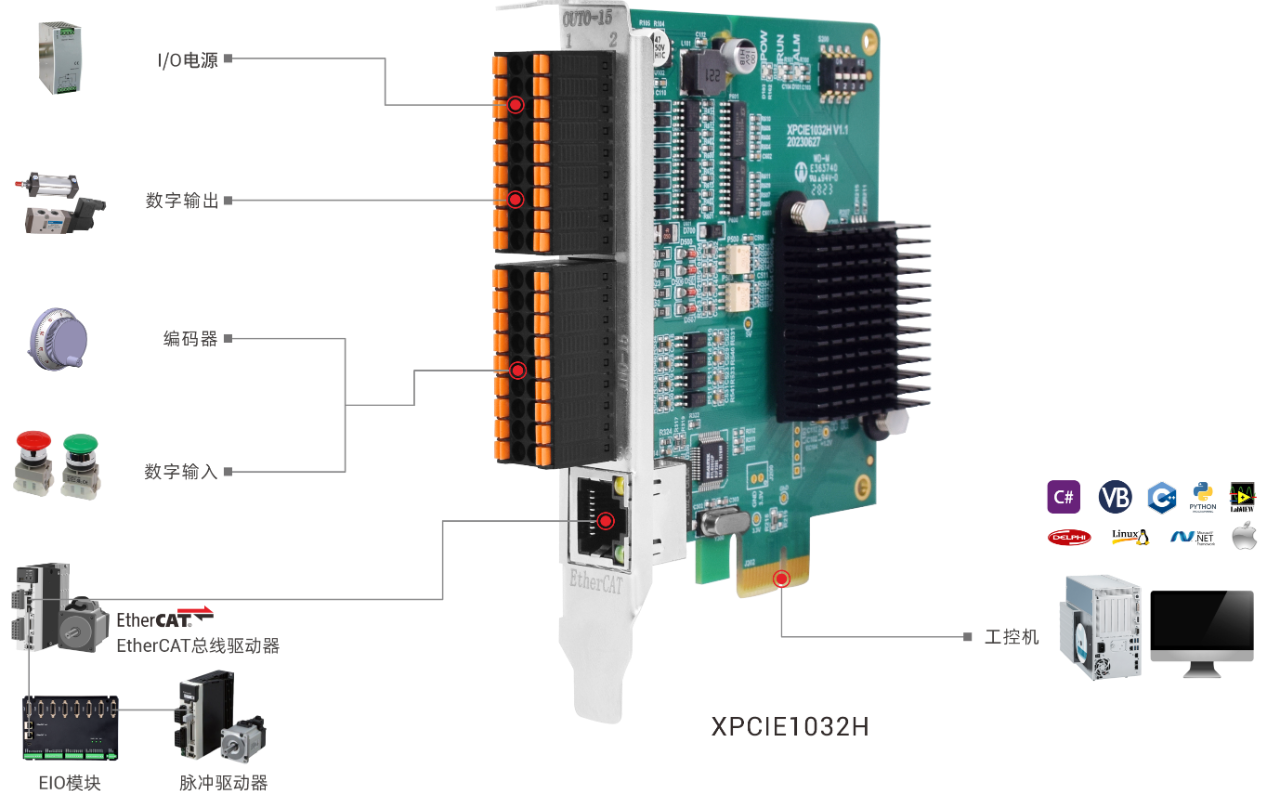
XPCIE1032H支持PWM,PSO功能,板载16进16出通用IO口,其中输出口全部为高速输出口,可配置为4路PWM输出口或者16路高速PSO硬件比较输出口。输入口含有8路高速输入口,可配置为4路高速色标锁存或两路编码器输入。
XPCIE1032H搭配MotionRT7实时内核,使用本地LOCAL接口连接,通过高速的核内交互,可以做到更快速的指令交互,单条指令与多条指令一次性交互时间可以达到3-5us左右。
➜XPCIE1032H与MotionRT7实时内核的配合具有以下优势:
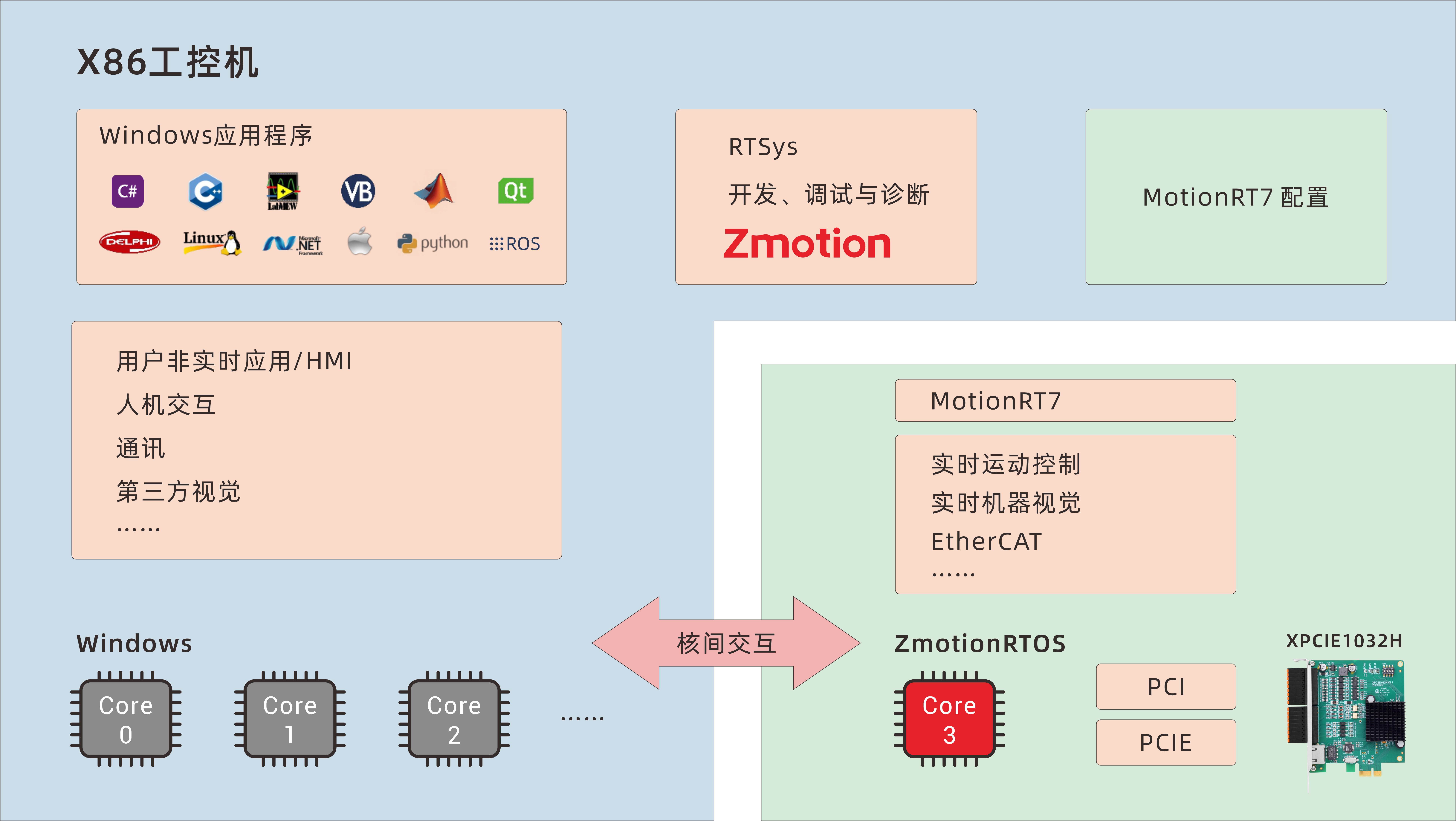
1.支持多种上位机语言开发,所有系列产品均可调用同一套API函数库;
2.借助核内交互,可以快速调用运动指令,响应时间快至微秒级,比传统PCI/PCIe快10倍;
3.解决传统PCI/PCIe运动控制卡在Windows环境下控制系统的非实时性问题;
4.支持一维/二维/三维PSO(高速硬件位置比较输出),适用于视觉飞拍、精密点胶和激光能量控制等应用;
5.提供高速输入接口,便于实现位置锁存;
6.支持EtherCAT总线和脉冲输出混合联动、混合插补。

➜使用XPCIE1032H和MotionRT7进行项目开发时,通常需要进行以下步骤:
1.安装驱动程序并签名认证,识别XPCIE1032H;
2.打开并执行文件“MotionRT710.exe”,配置参数和运行运动控制实时内核;
3.使用ZDevelop软件连接到控制器,进行参数监控。连接时请使用PCI/LOCAL方式,并确保ZDevelop软件版本在3.10以上;
4.完成控制程序开发,通过LOCAL链接方式连接到运动控制卡,实现实时运动控制。

➜与传统PCI/PCIe卡和PLC的测试数据结果对比:
| 平均值 | C++ LOCAL | C# LOCAL | 传统PCI/PCIe卡接口交互 | PLC网口通讯交互 |
| 1w次单条读取交互周期 | 4.70us | 5.3us | 64us | 500us-10ms |
| 10w次单条读取交互周期 | 3.90us | 5.7us | 65us | 500us-10ms |
| 1w次多条读取交互周期 | 6.20us | 8.85us | 472us | 500us-10ms |
| 10w次多条读取交互周期 | 5.50us | 8.37us | 471us | 500us-10ms |
我们可以从测试对比结果看出,XPCIE1032H运动控制卡配合实时运动控制内核MotionRT7,在LOCAL链接(核内交互)的方式下,指令交互的效率是非常稳定,当测试数量从1w增加到10w时,单条指令交互时间与多条指令交互时间波动不大,非常适用于高速高精的应用。
XPCIE1032H卡安装
关闭计算机电源。
打开计算机机箱,选择一条空闲的XPCIE卡槽,用螺丝刀卸下相应的挡板条。
将运动控制卡插入该槽,拧紧挡板条上的固定螺丝。
卸下临近插槽的一条挡板条,用螺丝将转接板固定在机箱该插槽上。
一、驱动安装
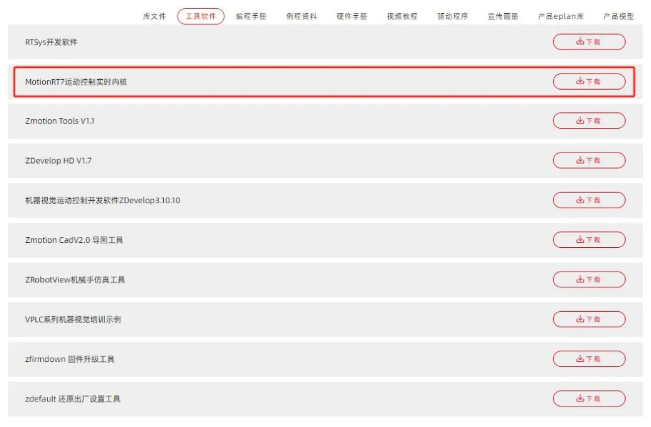
首先需要到正运动技术官网下载《MotionRT7运动控制实时内核》安装包,并检测此时PCIE卡已安装到工控机的PCIE插槽上,无明显松动翘边。
下载地址:http://www.zmotion.com.cn/download_list_4.html
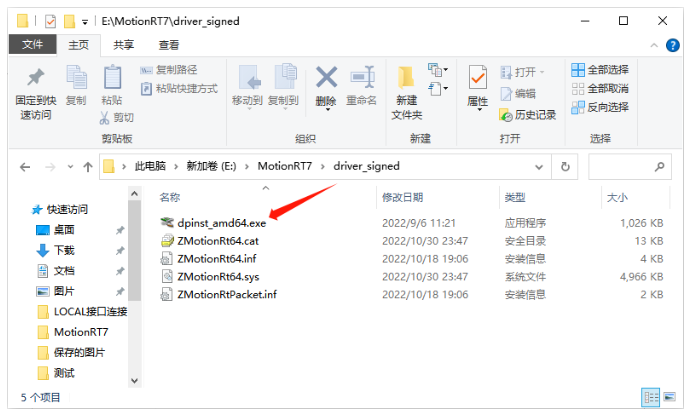
方法一:使用驱动目录中自带的安装向导软件dpinst_amd64.exe自动安装,具体操作按软件指南。
方法二:手动安装。
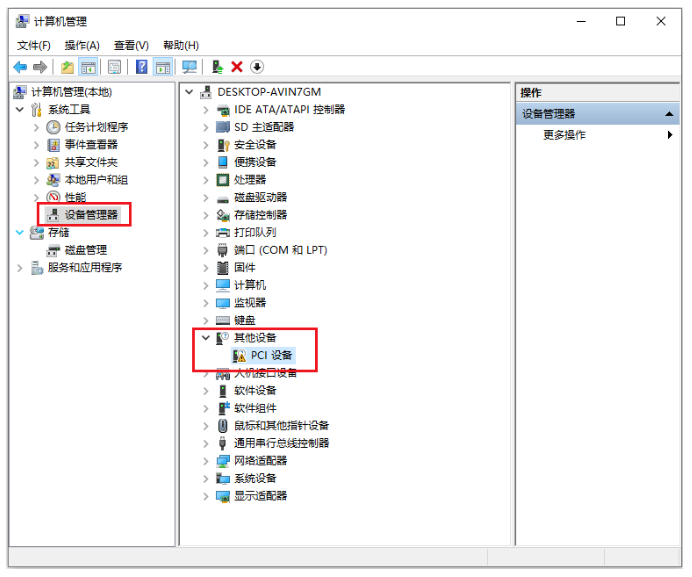
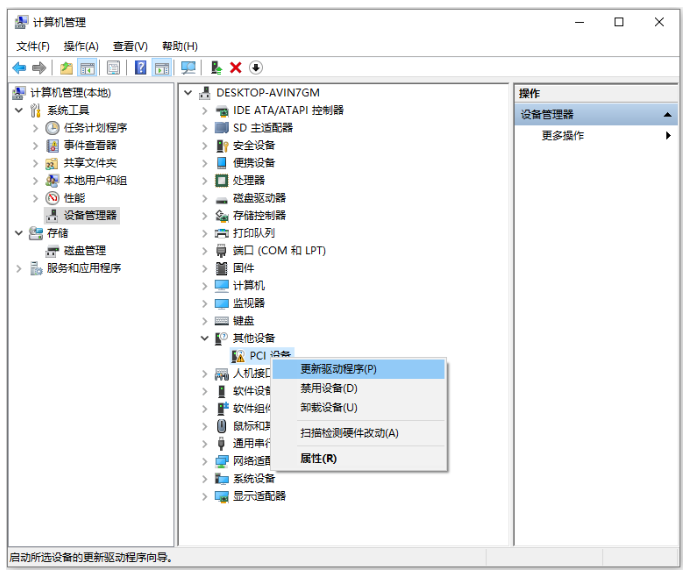
1.打开“设备管理器”菜单选择“其他设备”中的“PCI设备”。
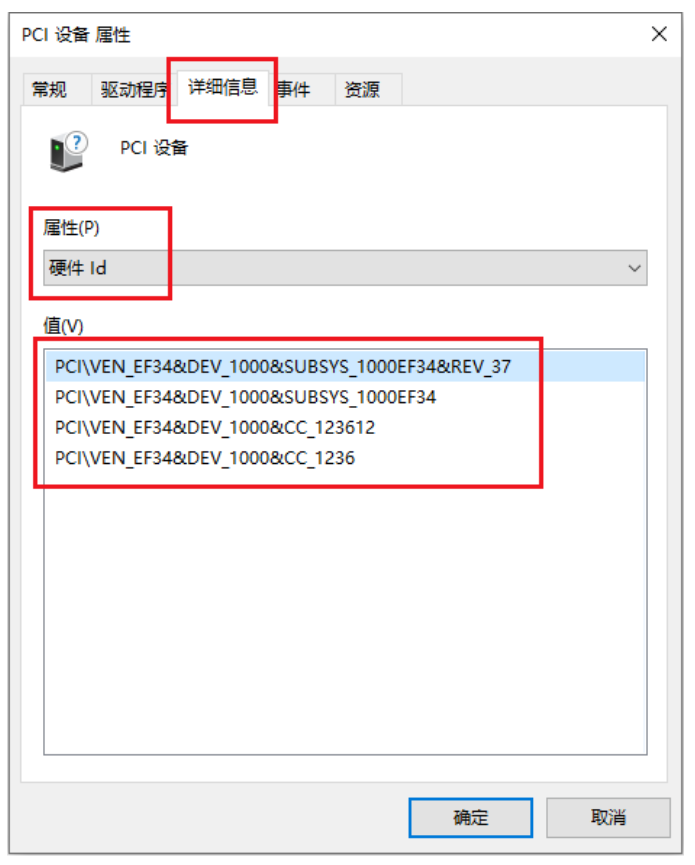
2.若存在多个PCI设备时,鼠标右击“属性”查看详细信息,属性选择“硬件ID”,确认为PCIVEN_EF34&DEV_1000&开头的PCI设备。
3.右击选择“更新驱动程序”。
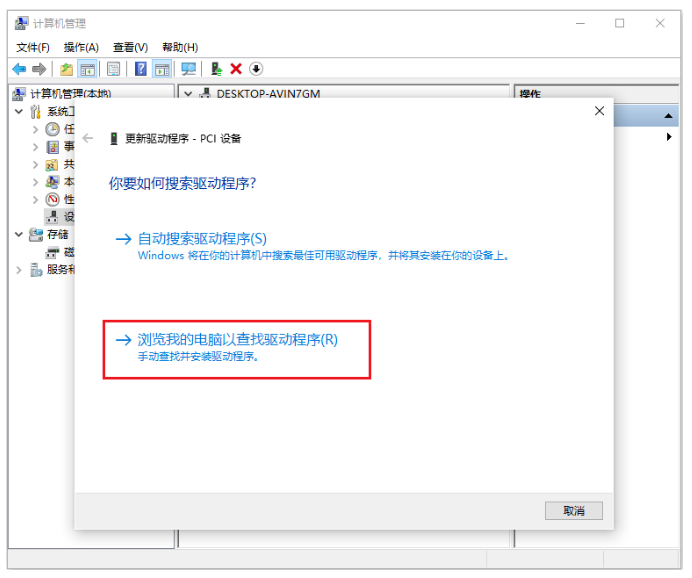
4.选择“手动浏览”查找驱动程序。
5.点击浏览,选择驱动driver文件夹。
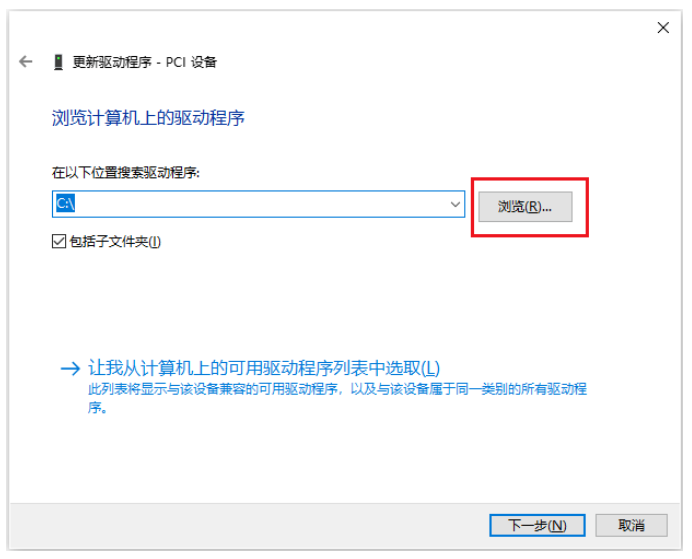
6.点击下一步。

7.等待安装完成,点击关闭。
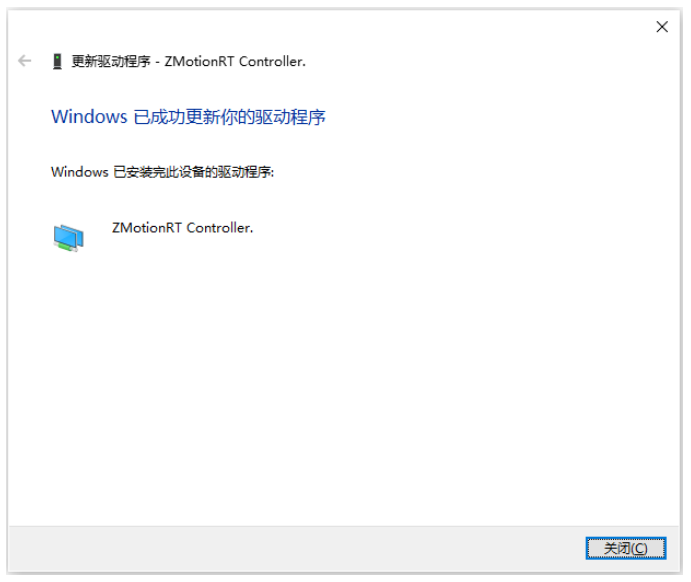
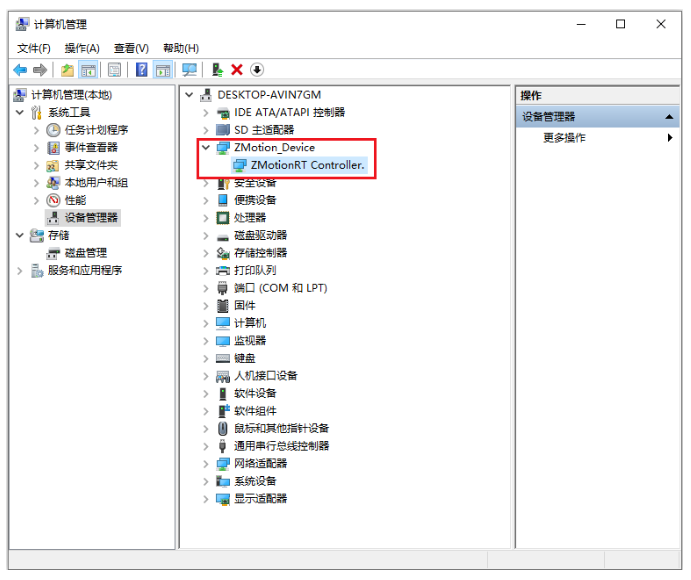
8.在设备管理器中有ZMotionRT Controller就是安装成功。
二、建立连接
1.运行控制台程序
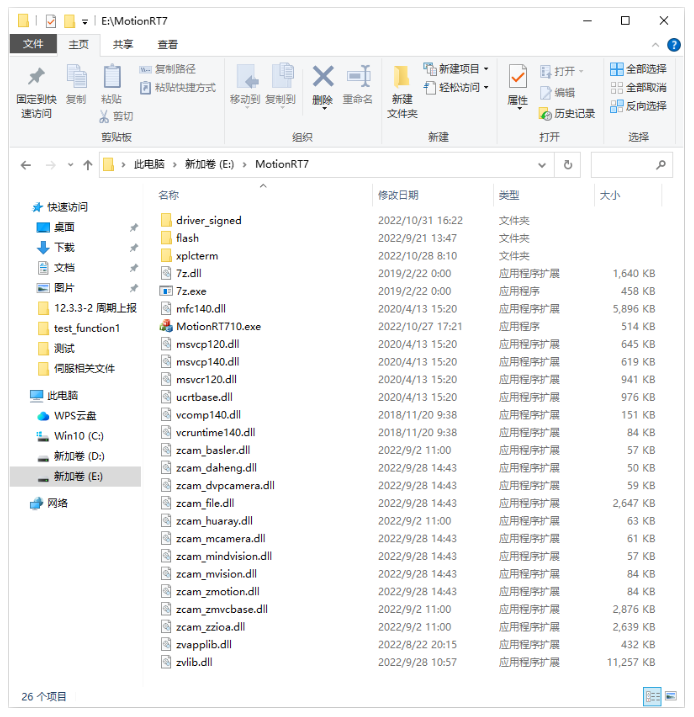
(1)打开控制台程序所在位置,运行可执行文件“MotionRt710.exe”。
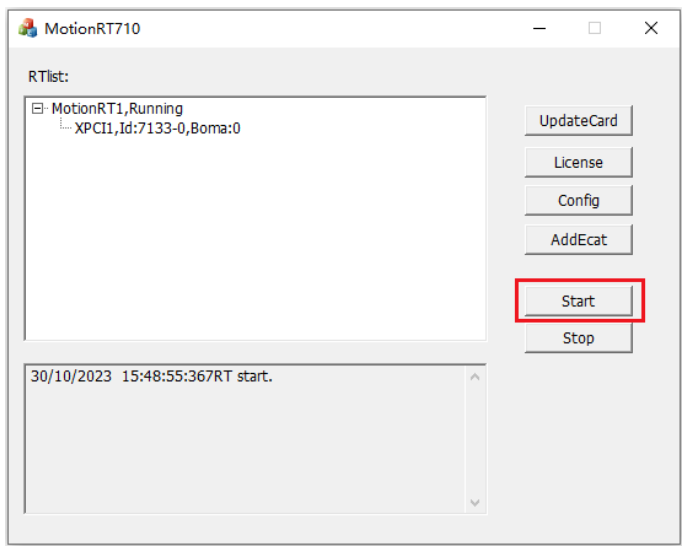
(2)点击“Start”。
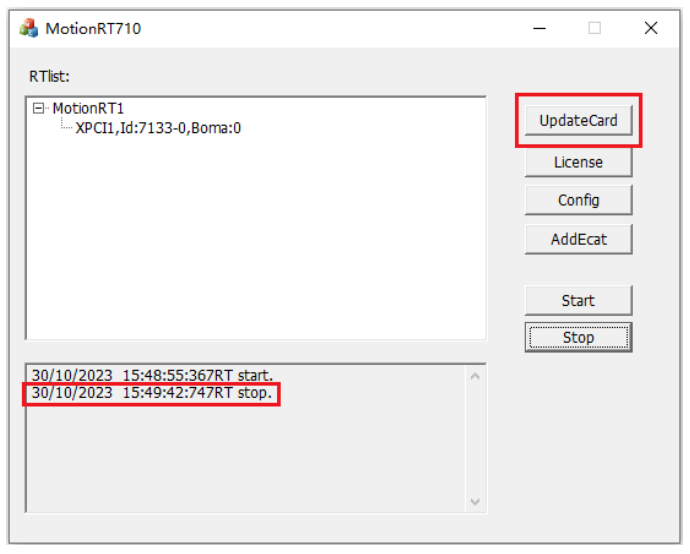
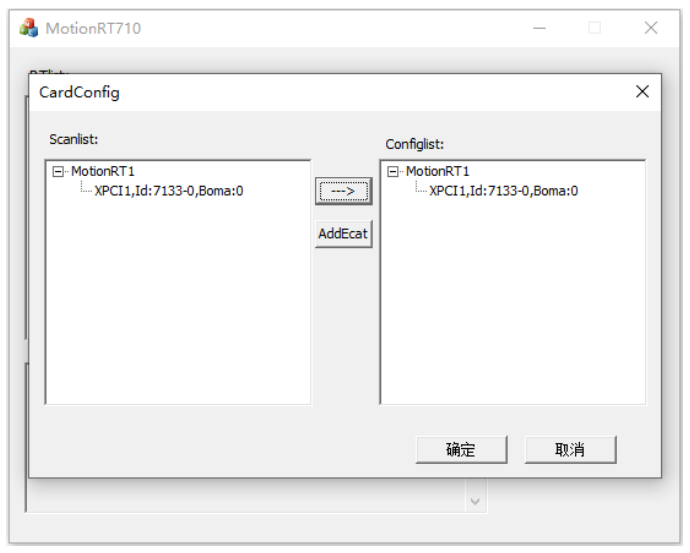
(3)保存XPCIE卡Config配置。
a.先点击【Stop】按钮关闭MontionRT7控制台,再点击UpdateCard更新卡信息。
b.点击“-->”将当前配置保存到历史配置中,方便下次打开可以直接使用。
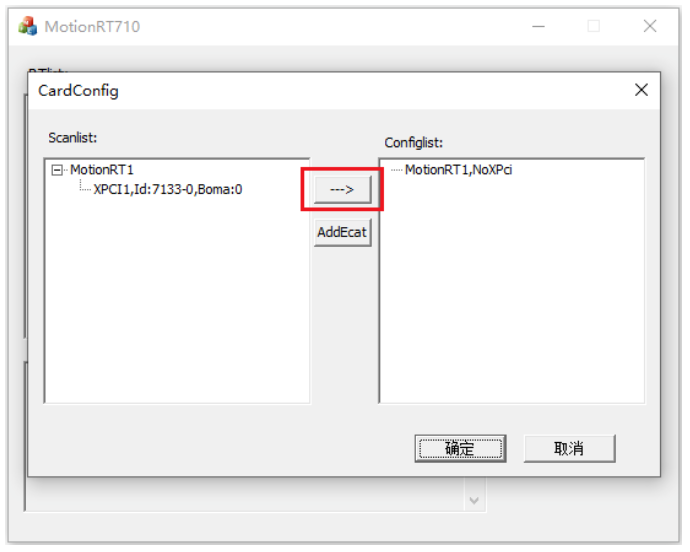
c.保存完成后,点击确定。
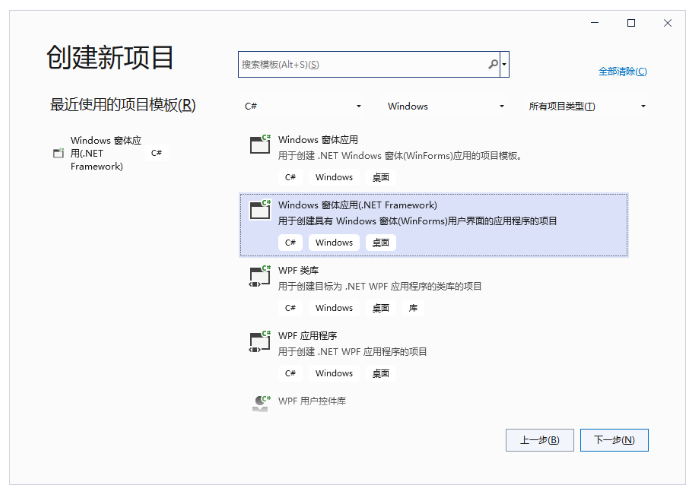
2.新建C#项目(VS2022)
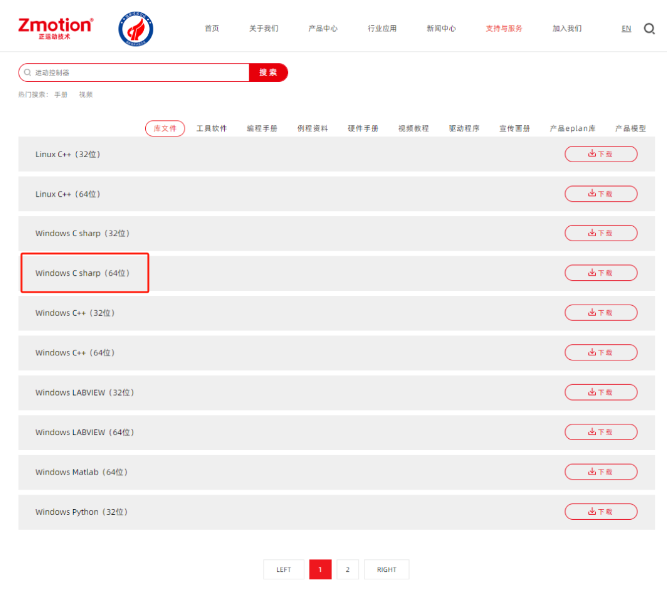
3.到正运动技术官网的下载中心选择需要的平台库文件
库文件下载地址:http://www.zmotion.com.cn/download_list_21.html
4.解压下载的安装包找到“Zmcaux.cs”,“zauxdll.dll”,“zmotion.dll”放入到项目文件中
(1)“Zmcaux.cs”放在项目根目录文件中,与bin目录同级。
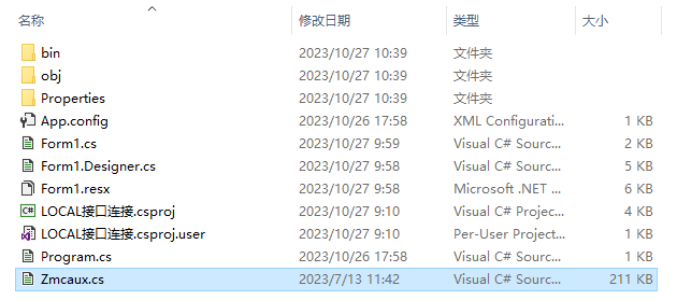
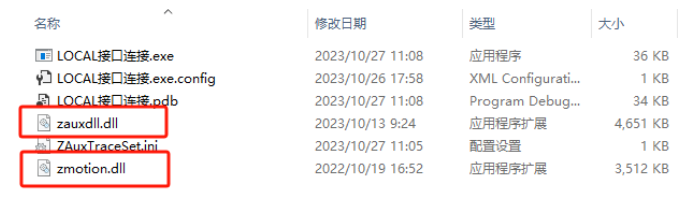
(2)“zauxdll.dll”,“zmotion.dll”放在bin → Debug。
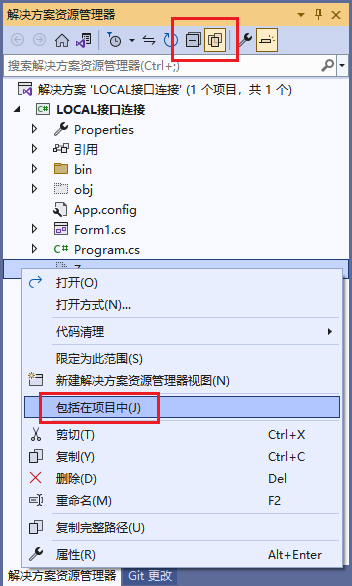
5.用vs打开新建的项目文件,在右边的解决方案资源管理器中点击显示所有,然后鼠标右键点击zmcaux.cs文件,点击包括在项目中
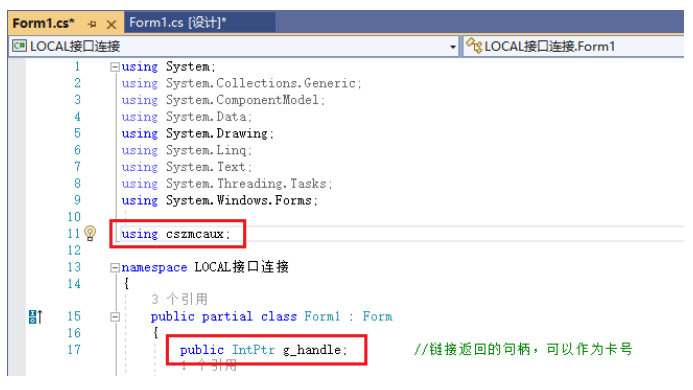
6.双击Form1.cs里面的Form1,出现代码编辑界面,在文件开头写入using cszmcaux,并声明控制器句柄g_handle
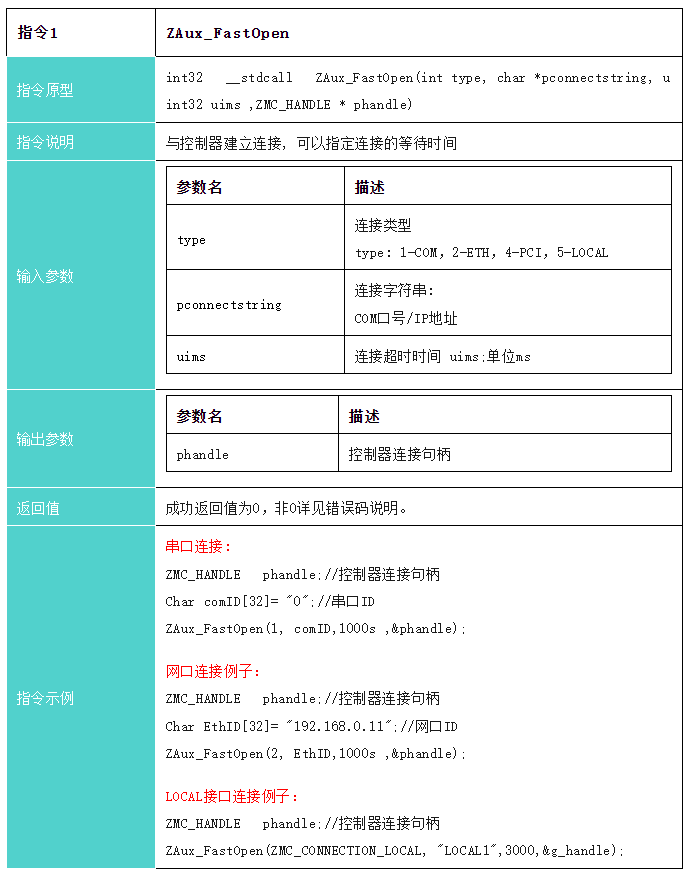
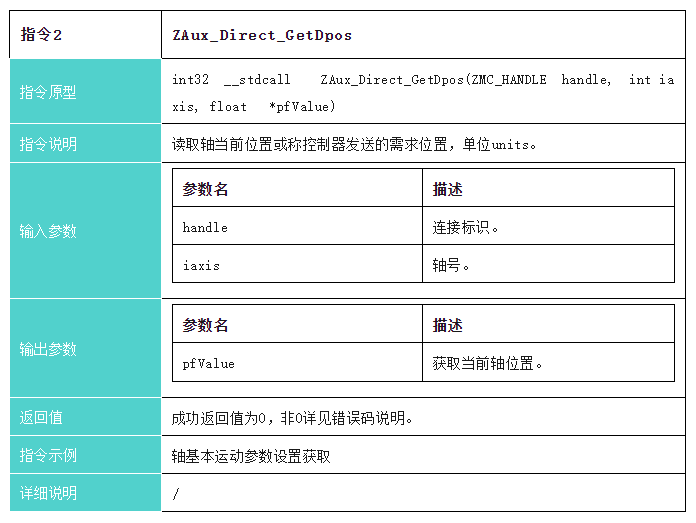
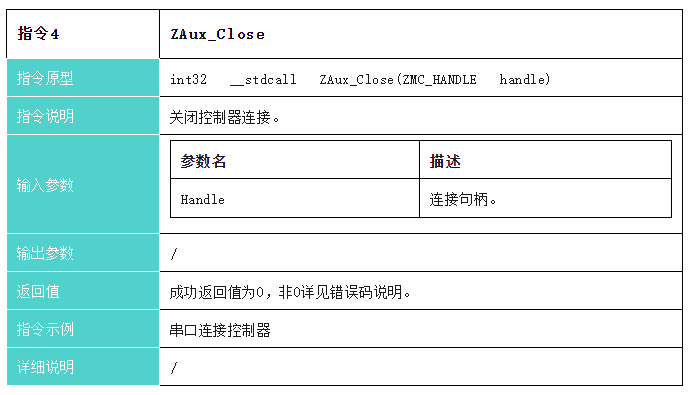
7.相关PC函数介绍

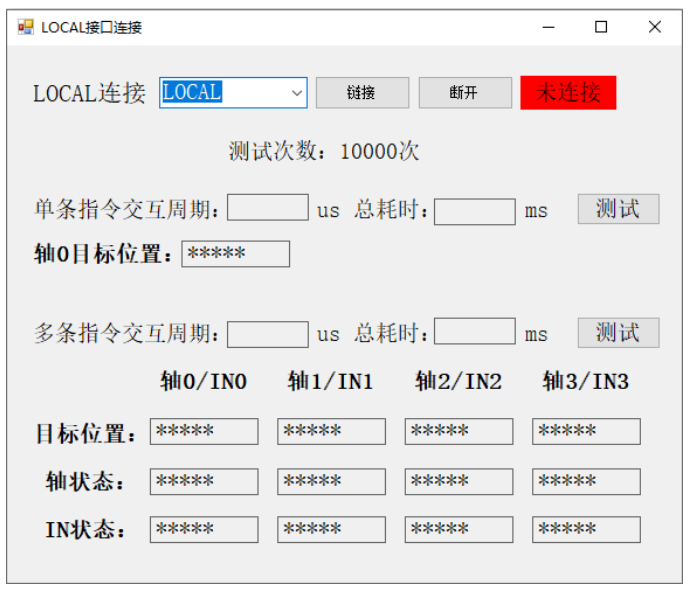
在form设计界面找到需要用到的控件拖拽到窗体中进行UI界面设计,效果如下。
8.相关程序
(1)通过LOCAL链接方式的链接按钮的消息响应函数来链接控制器。
private void button4_Click(object sender, EventArgs e)
{
//LOCAL方式连接
int ret = zmcaux.ZAux_FastOpen(5, "LOCAL", 1000, out g_handle);
if (ret == 0)
{
label2.Text = "已链接";
label2.BackColor = Color.Green;
MessageBox.Show("控制器链接成功!", "提示");
}
else
{
MessageBox.Show("链接失败,请选择正确的LOCAL!");
}
}
(2)通过单条指令交互周期的测试按钮的事件处理函数来计算单条指令的交互周期和总耗时。
private void SingleRun(object sender, EventArgs e)
{
float dpos = 0;
DateTime beforeDT = System.DateTime.Now;
for (int i = 0; i < 10000; i++)
{
zmcaux.ZAux_Direct_GetDpos(g_handle, 0, ref dpos);
}
DateTime afterDT = System.DateTime.Now;
TimeSpan ts = afterDT - beforeDT;
label14.Text = (ts.TotalMilliseconds).ToString();
label2.Text = ((ts.TotalMilliseconds * 1000) / 10000).ToString();
label16.Text = dpos.ToString();
}
(3)通过多条指令交互周期的测试按钮的事件处理函数来计算多条指令的交互周期和总耗时。
private void MuchRun(object sender, EventArgs e)
{
int[] status = { 0, 0, 0, 0 };
float[] dpos = { 0, 0, 0, 0 };
uint[] num = { 0, 0, 0, 0 };
string cmd;
int star = 0;
StringBuilder cmdBuff = new StringBuilder(2048);
string[] tmp = new string[12];
cmd = "?dpos(0),dpos(1),dpos(2),dpos(3),axisstatus(0),axisstatus(1),axisstatus(2),axisstatus(3),in(0),in(1),in(2),in(3)";
DateTime beforeDT = System.DateTime.Now;
for (int i = 0; i < 10000; i++)
{
zmcaux.ZAux_DirectCommand(g_handle, cmd, cmdBuff, 2048);
}
DateTime afterDT = System.DateTime.Now;
TimeSpan ts = afterDT - beforeDT;
label23.Text = (ts.TotalMilliseconds).ToString();
label16.Text = ((ts.TotalMilliseconds * 1000) / 10000).ToString();
string s = cmdBuff.ToString();
string[] arrS = new string[20];
for (int i = 0; i < s.Length; i++)
{
if (s[i] != 9)
{
arrS[star] += s[i];
}
else
{
star++;
continue;
}
}
label24.Text = arrS[0];
label25.Text = arrS[1];
label26.Text = arrS[2];
label27.Text = arrS[3];
label28.Text = arrS[4];
label30.Text = arrS[5];
label32.Text = arrS[6];
label34.Text = arrS[7];
if (Convert.ToInt32(arrS[8]) == 0)
{
label29.BackColor = Color.Red;
label29.Text = "信号未触";
}
else
{
label29.BackColor = Color.Green;
label29.Text = "信号已触";
}
if (Convert.ToInt32(arrS[9]) == 0)
{
label31.BackColor = Color.Red;
label31.Text = "信号未触";
}
else
{
label31.BackColor = Color.Green;
label31.Text = "信号已触";
}
if (Convert.ToInt32(arrS[10]) == 0)
{
label33.BackColor = Color.Red;
label33.Text = "信号未触";
}
else
{
label33.BackColor = Color.Green;
label33.Text = "信号已触";
}
if (Convert.ToInt32(arrS[11]) == 0)
{
label35.BackColor = Color.Red;
label35.Text = "信号未触";
}
else
{
label35.BackColor = Color.Green;
label35.Text = "信号已触";
}
}
(4)通过断开按钮的消息响应函数来断开控制器的链接。
private void button1_Click(object sender, EventArgs e)
{
zmcaux.ZAux_Close(g_handle);
g_handle = (IntPtr)0;
label2.Text = "未连接";
label2.BackColor = Color.Red;
}
9.运行效果

本次,正运动技术EtherCAT超高速实时运动控制卡XPCIE1032H上位机C#开发(一):驱动安装与建立连接,就分享到这里。
更多精彩内容以及源代码下载请关注“正运动小助手”公众号。
本文由正运动技术原创,欢迎大家转载,共同学习,一起提高中国智能制造水平。文章版权归正运动技术所有,如有转载请注明文章来源。
审核编辑 黄宇
-
运动控制
+关注
关注
4文章
599浏览量
33083 -
ethercat
+关注
关注
19文章
793浏览量
39109
发布评论请先 登录
相关推荐
EtherCAT运动控制卡XPCIE1032H上位机开发(一):驱动安装

单轴PSO视觉飞拍与精准输出:EtherCAT超高速实时运动控制卡XPCIE1032H上位机C#开发(七)

EtherCAT超高速实时运动控制卡XPCIE1032H上位机C#开发(九)
EtherCAT超高速实时运动控制卡XPCIE1032H上位机C#开发(十三)
EtherCAT超高速实时运动控制卡XPCIE1032H上位机C#开发(十四)




不止10倍提速!PCIe EtherCAT实时运动控制卡XPCIE1032H 等您评测!

XPCIE1028超高速实时运动控制卡简介和应用案例

EtherCAT超高速实时运动控制卡(二):EtherCAT总线初始化

EtherCAT超高速实时运动控制卡XPCIE1032H上位机C#开发





 工商网监
工商网监
评论