 如何实现对机器人接触力的数据滤波
如何实现对机器人接触力的数据滤波
下面举一些例子,实现对机器人接触力的数据滤波!
首先是导入数据:
clc
clear all;
close all;
X = xlsread('E:程序test~六维力数据.csv');%导入数据
A=X(:,1);B=X(:,2);C=X(:,3);D=X(:,4);E=X(:,5);F=X(:,6);%提取力数据
%% 滤波
x=A;
N=1347; %时域点数
fs = 100; % 重采样频率
T = 1/fs; % 周期
n = 5; % 1Hz频率被分成n段
% N = fs*n; % 因为1Hz频率被分成了n段,所以频谱的x轴数组有fs*n个数
f = (0: N-1)*fs/N; % 将fs个频率细分成fs*n个(即原来是[0, 1, 2, …, fs],现在是[0, 1/N, 2/N, …, (N-1)*fs/N])
t = (0: N-1)*T; % 信号所持续的时长(N个周期)
nHz = 10; % 画的频谱的横坐标到nHz
Hz = nHz*n; % 画的频谱的横坐标的数组个数
%% 绘制原始信号时频图
figure
subplot(211),plot(x,'k'),title('原始信号时域'),xlabel('采样点/n'),ylabel('力或力矩'); % 绘制原始信号时域
fx = abs(fft(x-mean(x)))/(N/2); % 傅里叶变换
subplot(212),plot(f(1:Hz), fx(1:Hz),'k'),title('原始信号频谱图'),xlabel('频率/Hz'),ylabel('幅值'); % 绘制原始信号频域
可以得到如下结果:
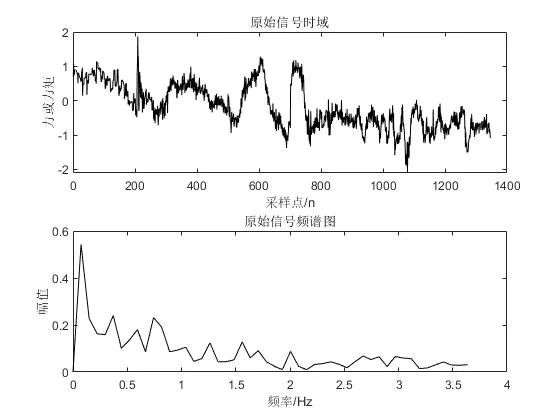
通过傅里叶变换可以得到接触力信号频域上的内容。
进行低通滤波处理:
%% 低通滤波
fc = 20;
Wc = 2*fc/fs;
[b,a] = butter(2,Wc,'low'); % 四阶的巴特沃斯低通滤波,保留频率低于fc的振动
fprintf('a = %6.18fn',a);
fprintf('b = %6.18fn',b);
x1 = filter(b,a,x);
figure
subplot(211),plot(x1,'b'),title('低通滤波信号时域图'),xlabel('采样点/n'),ylabel('力或力矩');
fx = abs(fft(x1-mean(x1)))/(N/2); % 傅里叶变换
subplot(212),plot(f(1:Hz), fx(1:Hz),'b'),title('低通滤波信号频谱图'),xlabel('频率/Hz'),ylabel('幅值'); % 绘制原始信号频域
Butterworth digital and analog filter design:
function varargout = butter(n, Wn, varargin)
narginchk(2,4);
if coder.target('MATLAB')
[varargout{1:nargout}] = butterImpl(n,Wn,varargin{:});
else
allConst = coder.internal.isConst(n) && coder.internal.isConst(Wn);
for ii = 1:length(varargin)
allConst = allConst && coder.internal.isConst(varargin{ii});
end
if allConst && coder.internal.isCompiled
[varargout{1:nargout}] = coder.const(@feval,'butter',n,Wn,varargin{:});
else
[varargout{1:nargout}] = butterImpl(n,Wn,varargin{:});
end
end
end
function varargout = butterImpl(n,Wn,varargin)
inputArgs = cell(1,length(varargin));
if nargin > 2
[inputArgs{:}] = convertStringsToChars(varargin{:});
else
inputArgs = varargin;
end
validateattributes(n,{'numeric'},{'scalar','real','integer','positive'},'butter','N');
validateattributes(Wn,{'numeric'},{'vector','real','finite','nonempty'},'butter','Wn');
[btype,analog,~,msgobj] = iirchk(Wn,inputArgs{:});
if ~isempty(msgobj)
coder.internal.error(msgobj.Identifier,msgobj.Arguments{:});
end
% Cast to enforce precision rules
n1 = double(n(1));
coder.internal.errorIf(n1 > 500,'signal:butter:InvalidRange')
% Cast to enforce precision rules
Wn = double(Wn);
% step 1: get analog, pre-warped frequencies
fs = 2;
if ~analog
u = 2*fs*tan(pi*Wn/fs);
else
u = Wn;
end
% step 2: Get N-th order Butterworth analog lowpass prototype
[zs,ps,ks] = buttap(n1);
% Transform to state-space
[a,b,c,d] = zp2ss(zs,ps,ks);
% step 3: Transform to the desired filter
if length(Wn) == 1
% step 3a: convert to low-pass prototype estimate
Wn1 = u(1);
Bw = []; %#ok< NASGU >
% step 3b: Transform to lowpass or high pass filter of desired cutoff
% frequency
if btype == 1 % Lowpass
[ad,bd,cd,dd] = lp2lp(a,b,c,d,Wn1);
else % btype == 3 % Highpass
[ad,bd,cd,dd] = lp2hp(a,b,c,d,Wn1);
end
else % length(Wn) is 2
% step 3a: convert to low-pass prototype estimate
Bw = u(2) - u(1); % center frequency
Wn1 = sqrt(u(1)*u(2));
% step 3b: Transform to bandpass or bandstop filter of desired center
% frequency and bandwidth
if btype == 2 % Bandpass
[ad,bd,cd,dd] = lp2bp(a,b,c,d,Wn1,Bw);
else % btype == 4 % Bandstop
[ad,bd,cd,dd] = lp2bs(a,b,c,d,Wn1,Bw);
end
end
% step 4: Use Bilinear transformation to find discrete equivalent:
if ~analog
[ad,bd,cd,dd] = bilinear(ad,bd,cd,dd,fs);
end
if nargout == 4 % Outputs are in state space form
varargout{1} = ad; % A
varargout{2} = bd; % B
varargout{3} = cd; % C
varargout{4} = dd; % D
else
p = eig(ad);
[z,k] = buttzeros(btype,n1,Wn1,analog,p+0i);
if nargout == 3 % Transform to zero-pole-gain form
varargout{1} = z;
varargout{2} = p;
varargout{3} = k;
else
den = real(poly(p));
num = [zeros(1,length(p)-length(z),'like',den) k*real(poly(z))];
varargout{1} = num;
varargout{2} = den;
end
end
end
function [z,k] = buttzeros(btype,n,Wn,analog,p)
% This internal function computes the zeros and gain of the ZPK
% representation. Wn is scalar (sqrt(Wn(1)*Wn(2)) for bandpass/stop).
if analog
% for lowpass and bandpass, don't include zeros at +Inf or -Inf
switch btype
case 1 % lowpass: H(0)=1
z = zeros(0,1,'like',p);
k = Wn^n; % prod(-p) = Wn^n
case 2 % bandpass: H(1i*Wn) = 1
z = zeros(n,1,'like',p);
k = real(prod(1i*Wn-p)/(1i*Wn)^n);
case 3 % highpass: H(Inf) = 1
z = zeros(n,1,'like',p);
k = 1;
case 4 % bandstop: H(0) = 1
z = 1i*Wn*((-1).^(0:2*n-1)');
k = 1; % prod(p) = prod(z) = Wn^(2n)
otherwise
coder.internal.error('signal:iirchk:BadFilterType','high','stop','low','bandpass');
end
else
Wn = 2*atan2(Wn,4);
switch btype
case 1 % lowpass: H(1)=1
z = -ones(n,1,'like',p);
k = real(prod(1-p))/2^n;
case 2 % bandpass: H(z) = 1 for z=exp(1i*sqrt(Wn(1)*Wn(2)))
z = [ones(n,1,'like',p); -ones(n,1,'like',p)];
zWn = exp(1i*Wn);
k = real(prod(zWn-p)/prod(zWn-z));
case 3 % highpass: H(-1) = 1
z = ones(n,1,'like',p);
k = real(prod(1+p))/2^n;
case 4 % bandstop: H(1) = 1
z = exp(1i*Wn*( (-1).^(0:2*n-1)' ));
k = real(prod(1-p)/prod(1-z));
otherwise
coder.internal.error('signal:iirchk:BadFilterType','high','stop','low','bandpass');
end
end
% Note: codegen complains when z set to both real and complex values above
if ~any(imag(z))
z = real(z);
end
end
可以得到滤波后的接触力数据:

为了更详细的进行原始数据与滤波后的数据进行对比,接下来以几种不同形式的滤波方式进行对比。
原始接触力数据:

移动平均滤波
b = [1 1 1 1 1 1]/6;
x11 = filter(b,1,x);

很明显,去除噪声的效果较为突出!
接下来采用中值滤波:

中值滤波的效果相比于移动平均滤波有改善。
接下来进行维纳滤波:
Rxx=xcorr(x, x); %得到混合信号的自相关函数
M=100; %维纳滤波器阶数
for i=1:M
for j=1:M
rxx(i,j)=Rxx(abs(j-i)+N); %得到混合信号的自相关矩阵
end
end
Rxy=xcorr(x,x1); %(此处x1为中值信号滤波后效果,原信号不存在)得到混合信号和原信号的互相关函数
for i=1:M
rxy(i)=Rxy(i+N-1); %得到混合信号和原信号的互相关向量
end
h = inv(rxx)*rxy'; %得到所要涉及的wiener滤波器系数
x1=filter(h,1, x); %将输入信号通过维纳滤波器

但维纳滤波的效果没有前面两个滤波算法的效果好,需要进一步整定参数。
下面进行自适应滤波:
k=100; %时域抽头LMS算法滤波器阶数
u=0.001; %步长因子
%设置初值
x1=zeros(1,N); %output signal
x1(1:k)=x(1:k); %将输入信号SignalAddNoise的前k个值作为输出yn_1的前k个值
w=zeros(1,k); %设置抽头加权初值
e=zeros(1,N); %误差信号
%用LMS算法迭代滤波
for i=(k+1):N
XN=x((i-k+1):(i));
XN=XN';
x1(i)=w*XN';
e(i)=x11(i)-x1(i);%不存在原信号,此处换为平均滤波后的时域波形
w=w+2*u*e(i)*XN;
end

四阶的巴特沃斯低通滤波:
Wc=2*3/fs; %截止频率 3Hz
[b,a]=butter(4,Wc,'low'); % 四阶的巴特沃斯低通滤波
x1=filter(b,a,x);

二阶的巴特沃斯带通滤波:
Wc1=2*1/fs; %下截止频率 1Hz
Wc2=2*6/fs; %上截止频率 6Hz
[b,a]=butter(2,[Wc1, Wc2],'bandpass'); % 二阶的巴特沃斯带通滤波
x1=filter(b,a,x);

需要生成滤波器时,可以使用matlab中自带的工具。filterDesigner
利用这个工具,可以将设计的滤波器保存成一个函数。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人
+关注
关注
211文章
28762浏览量
208987 -
滤波
+关注
关注
10文章
669浏览量
56809 -
数据
+关注
关注
8文章
7209浏览量
89867
发布评论请先 登录
相关推荐
nao机器人与其他机器人的区别
机器人在之前的机器人的基础上,加入了可以自由便捷的运动功能,两个摄像头精准拍摄、全方位的视觉功能,还有一个超声传感器功能。传感器可以识别人类和NAO机器人的接触,从而做些动作和人类互动
发表于 02-13 15:43
机器人弹钢琴,实现难度如何?
钢琴曲目的机器人,只需要它实现能弹奏曲目。因为现在刚刚接触机器人制作方面,只懂一些中断和舵机啥的,不知道做成的难度有多大,,,,希望各位前辈能够不舍赐教。如果能做成,都需要
发表于 05-22 17:06
机器人弹钢琴
钢琴曲目的机器人,只需要它实现能弹奏曲目。因为现在刚刚接触机器人制作方面,只懂一些中断和舵机啥的,不知道做成的难度有多大,,,,希望各位前辈能够不舍赐教。如果能做成,都需要
发表于 05-22 17:09
机器人的眼睛和大脑:智能化光电传感器
的检测。较高的研发费用是一直没有成功实现相对滑移直接检测技术工业化应用的主要原因。 与现在建议使用的方案不同,在IITB霍伦霍夫研究所中研发成功的光学传感器能够直接对相对滑移进行检测。结合接触力检测
发表于 11-06 10:52
软固结磨粒群接触力分析
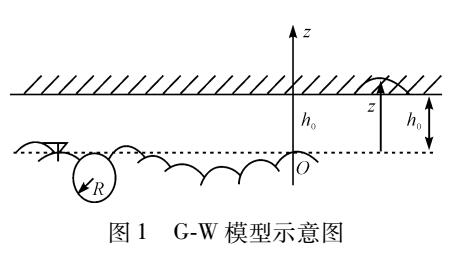
针对激光强化模具白由曲面的光整加工问题,对软固结磨粒群气压砂轮与模具表面接触力、下压量进行了研究,对砂轮接触模具表面时的磨粒姿态进行了分析,提出了一种基于GW接触模型构建了软固结磨粒群接触力
发表于 03-16 16:19
•0次下载
机器人力控的性能指标有哪些
在机器人的操作任务中,处理机器人和环境之间的物理接触是非常重要的。 由于机器人系统的复杂性和不确定性,纯运动控制往往是不够的,因为即使是最精确的模型也无法完全准确地预测所有可能的情况。
机器人阻抗控制有几种方法
在工业机器人中,阻抗控制是一种非常重要的控制方法,主要用于控制机器人的力和位。通过调整阻抗,机器人可以更好地适应不同的操作环境和任务需求。 阻抗控制的基本思路是:建立一个期望的机器人位
力控机器人接触力滤波与估计
力控机器人本身关节具有力传感器,可为什么还需要接触力滤波和估计呢?这是不是有些多余?显然是不是的,本篇博文总结下力控机器人接触力
单关节机械臂接触力补偿因素
具有单轴力传感器的单关节机械臂接触力估计: 接触力估计需要考虑多个因素进行补偿,以提高估计的准确性。以下是一些常见的补偿因素: 1.重力补偿:机械臂在接触过程中会受到重力的影响,因此需要对测量到的力
机器臂柔顺控制初步分析
为实现与环境的安全、柔顺交互,需要将机器人期望动力学行为与接触环境所表现出来的特征进行匹配。定性地分析来看: 对于高刚度接触环境,期望机器臂
柔性触觉传感器或将在人形机器人时代大放异彩
近日,开源证券发布研究报告称,柔性触觉传感器又称为“电子皮肤”,能够实现与环境接触力、温度、湿度、震动、材质、软硬等特性的监测,是机器人直接感知环境作用的重要传感器,有助于智能化的人形机器人
接触力对120A250A大电流接线端子有哪些影响
德索工程师说道在电子连接技术中,接触力是确保电力传输稳定性和效率的关键因素。特别是在120A250A大电流接线端子的应用上,适当的接触力可以防止连接失败和电阻增加,这对于保障设备的安全运行重要。然而,接触力的大小并非一成不变,其






 工商网监
工商网监
评论