 基于自行车模型的路径跟踪控制算法
基于自行车模型的路径跟踪控制算法
2.1 基于自行车模型的路径跟踪控制算法
纯追踪控制是最早提出的路径跟踪策略之一。由于其易于实现和令人满意的性能,已被证明是车辆控制不可或缺的工具。
在DARPA挑战赛中,有多个团队采用了纯追踪的控制算法[3]。
从自行车模型出发,纯跟踪算法以车后轴为切点, 车辆纵向车身为切线, 通过控制前轮转角,使车辆可以沿着一条经过目标路点(goal
point)的圆弧行驶,如图2-1所示。
通过正弦定理求出曲率、偏转角与车轴之间的关系:
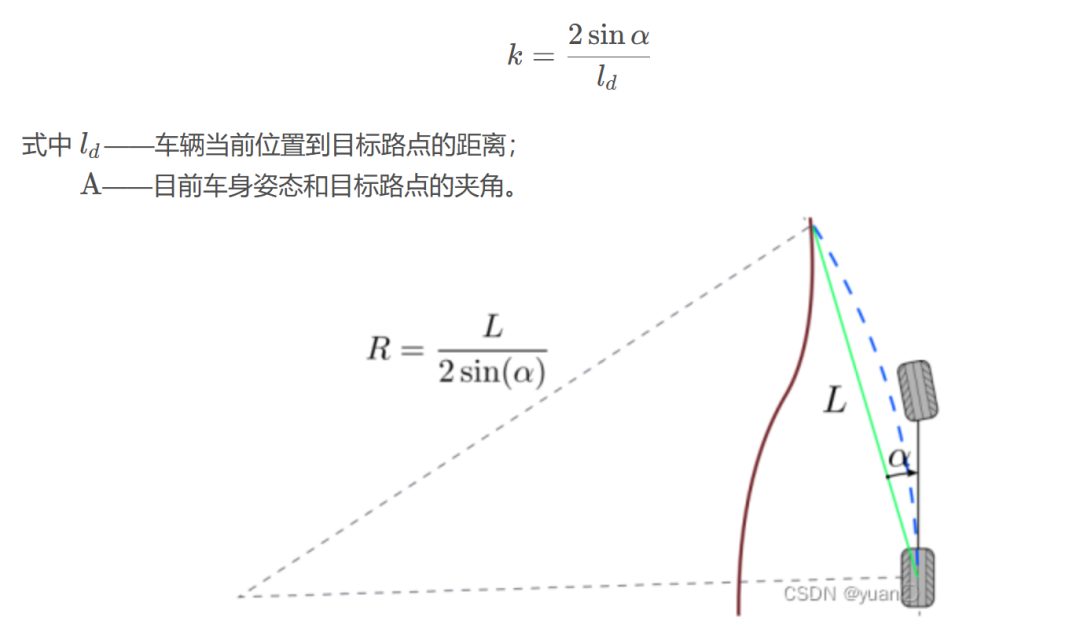
图2-1 纯追踪控制示意图


通常来说,会使用最大、最小前视距离来约束前视距离,越大的前视距离意味着轨迹的追踪越平滑,小的前视距离会使得追踪更加精确(当然也会带来控制的震荡),如图2-2
所示。
驾驶员在实际驾驶过程中会观察车辆前方一定距离范围内的道路信息,以获得一定的预见性,提前对车辆进行调整,从而取得良好的控制效果。
在路径跟踪过程中,前视距离与车速的大小有直接的关系。当车速较高时,需要较大的前视距离;当车速较低时,较小的前视距离可以达到很好的跟踪精度。

图2-2 前视距离对控制的影响
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
自行车
+关注
关注
0文章
112浏览量
24728 -
模型
+关注
关注
1文章
3410浏览量
49466 -
自动驾驶
+关注
关注
788文章
13995浏览量
167675
发布评论请先 登录
相关推荐
电动自行车控制器的技术原理解析
现代电动自行车技术的发展已使控制器远远超越了传统的单一驱动控制功能,成为了电动自行车的能量管理与控制中心,这是保障电动
发表于 12-15 11:15
•3231次阅读
纯追踪算法自行车模型
和自行车一致,前面的轮胎控制车辆的转角轨迹追踪目前主流的轨迹跟踪方法有两类,基于几何的追踪方法和基于模型预测的方法;纯追踪就是基于几何追踪的方法。下图是一个几何学
发表于 08-17 08:58
如何打造自动驾驶「自行车」的呢
自行车什么时候能实现「自己行走」呢?自行车属于欠驱动系统,如果不进行控制就无法实现稳定站立最近,B站野生技术协会野生钢铁侠、「华为天才少年计划」入选者、AI算法工程师稚晖君发布了一个「
发表于 08-26 09:23
电动自行车在线防盗装置
随着电动自行车的普及,电动自行车被盗现象屡屡发生。电动自行车所使用的电池是36V或48V的铅酸蓄电池,十分笨重,很难搬动。因此市民一般都将自己的电动自行车停放在自家楼下,从家里引出两根
如何自己DIY一个平衡自行车
部分介绍: 第一部分介绍自行车平衡基本物理原理; 第二部分理论篇,对平衡自行车的算法进行理论分析,包括模型分析、姿态检测方法、PID算法,
电动自行车充电桩介绍
本款电动自行车充电桩是保障电动自行车安全快捷充电的重要
设施,适用于单位、住宅小区、商超的自行车停车棚,为电动自行
车提供充电电源。
发表于 08-11 14:34
•14次下载

自行车平衡DIY:自行车平衡控制原理
自行车是怎么平衡的,老外做过一个非常好的视频,这个视频很好地证明了常见的”角动量守恒”的说法是错误的,并且正确的说明了自行车平衡原理是和转向相关的,但没有具体指出平衡和转向的关系。
发表于 06-25 15:26
•1366次阅读






 工商网监
工商网监
评论