 自动驾驶PID、LQR和滑模控制介绍
自动驾驶PID、LQR和滑模控制介绍
PID控制
PID控制又称比例-积分-微分控制器。在自动驾驶汽车跟踪控制中,该算法主要是对车辆反馈的车辆位姿等信息做偏差处理,并通过比例、积分、微分进行线性组合构成控制量,从而对被控对象进行控制。
该算法由于无需建立精确模型,算法简单易实现,广泛应用于各工业领域,但其参数调整比较困难,因此有许多学者将现代智能化算法如模糊控制、神经网络控制等算法与
PID算法进行结合,简化了控制器参数调整过程。
通过计算期望车速与实际车速的偏差,
模糊免疫PID速度跟踪控制器控制制动/油门机械腿分别操纵制动/油门踏板。通过引入车速反馈不断更新汽车的侧向加速度增益,
实现了车辆转向控制与纵向车速控制的解耦。
仿真实验表明该算法能使平衡小车在保持动态平衡的前提下对指定轨迹进行的良好跟踪,具有较快的动态响应速度,对干扰具有良好的鲁棒性。
对于纵向控制,总车轮扭矩由嵌入MPC框架中的PID速度控制器产生。仿真试验结果表明,该控制器对车辆横向和纵向位置的跟踪误差较小,对轨迹和速度的跟踪性能良好。
LQR控制
LQR控制器是一种多目标最优控制,能够使系统在被控时间内,寻求最优控制率减小目标函数以达到最优控制效果,即以较小的控制量和代价使系统稳定达到目标状态。
该控制算法易于设计,但在曲率变化较大的路段进行跟踪控制时,会使得跟踪误差变大而导致跟踪失败,因此往往需要结合其他控制算法如前馈控制来进行无误差跟踪。
结果表明,所提出的控制方法可有效提高控制精度,实现铰接式车辆的精确、稳定路径跟踪。
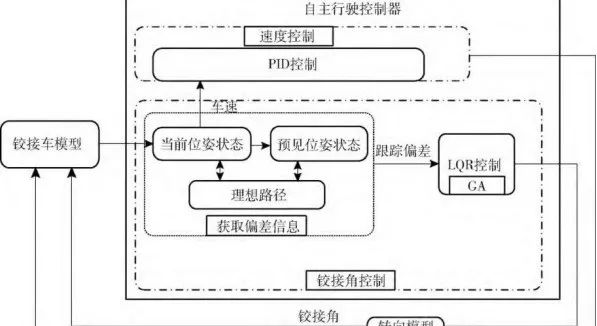
图2-7 对于基于铰链车模型的路径跟踪控制系统
其次,利用LQR最优控制实现该线性系统的闭环控制,以保证其稳定性和快速收敛性。在此过程中,通过矩阵Q和r平衡状态变量和输入的权重,可以得到LQR的最优二次型性能指标,因此可以方便地调整和标定控制参数。
2.6 滑模控制
滑模控制(SMC)又称滑模变结构控制,是一种典型的非线性反馈控制方法,具有很强的抗不确定性扰动能力。通过设计合适的滑动模态,可以迫使系统快速按照预定的状态轨迹运行,具有鲁棒闭环性能。
滑模控制的缺点主要是其不连续的开关特性将会引起抖动,降低控制系统抖动是目前该领域的研究热点与难点。
首先,对车辆的运动过程进行研究,建立车辆的运动学模型。
其次,基于B样条曲线理论建立非线性约束平行泊车路径优化函数,并分析车辆运动学约束条件。
然后,结合非时间参考路径跟踪控制和终端滑模控制方法,提出基于趋近律的非时间参考终端滑模路径跟踪控制方法。
-
控制器
+关注
关注
112文章
16487浏览量
179796 -
PID
+关注
关注
36文章
1473浏览量
85940 -
自动驾驶
+关注
关注
785文章
13954浏览量
167252 -
LQR
+关注
关注
1文章
6浏览量
3161
发布评论请先 登录
相关推荐





 工商网监
工商网监
评论